自供電磁阻車輛檢測節點設計
2013-06-20 03:12:40沈繼忠董利達
傳感技術學報 2013年12期
關鍵詞:檢測
王 瑋,沈繼忠*,董利達
(1.浙江大學信息與電子工程學系,杭州310027;2.杭州師范大學信息科學與工程學院,杭州310012)
車輛檢測器可用于采集車流量、車速、道路占有率等交通信息,是智能交通系統中最重要的數據采集設備之一[1]。常用的檢測器有視頻、感應線圈、微波雷達、紅外、超聲波等類型,其中線圈檢測技術成熟且應用最廣泛,但是存在安裝維護復雜、對道路破壞大等缺點[2],其他檢測手段由于成本較高、易受環境影響而限制了大規模應用。磁阻傳感器利用鐵、鈷、鎳等金屬的磁阻效應可以檢測到車輛經過時對環境磁場的擾動,與線圈檢測相比具有安裝維護方便,可靠性高和耗能少等優點,有望成為線圈檢測的替代方式[3]。
磁阻檢測器埋于路面下工作,節點一般采用電池供電,由于壽命受電源限制,已有設計難以支持較高的采樣率和無線通信負荷,無法滿足高準確率和高實時性檢測的要求,因此磁阻車檢技術的應用范圍集中在停車位或低速少車路段。目前對于磁阻車檢技術研究主要集中在檢測算法上[4-5],而對節點壽命問題缺乏有效解決方法。E.Sifuentes等人[6]提出以功耗極低的光學檢測來觸發磁阻檢測,節點僅在疑似車輛到來時才喚醒工作,不足之處是光學傳感易受干擾且車流量對節點功耗影響大。郭鵬等[7]采用電源動態管理的方法一定程度上降低了傳感能耗,但數據采集較慢使工作占空比較大,能量利用效率仍較低。此外上述方案均沒有對節點的無線通信進行優化設計。近年來太陽能道釘技術逐漸成熟并得到廣泛應用[8],受其啟發可將低功耗設計與太陽能道釘的自供電技術結合來解決磁阻車輛檢測節點的壽命限制問題。為此本文從功耗控制和能量采集兩方面入手,設計了一種基于磁阻傳感器的自供電車輛檢測節點。
1 系統結構
用于采集道路車輛信息的檢測網絡是由一個匯聚節點AP(Access Point)和若干個傳感節點SN(Sensor Node)組成的星型網絡。圖1是采集系統的網絡結構示意圖。帶有太陽能電池板的SN節點安裝在車道中央,為避免妨礙行車,可借用地埋式道釘燈的安裝方式,即節點表面與路面平齊,并用高強度透明殼體加以保護。SN節點對車輛信號進行實時處理檢測,并將結果上傳路旁的AP節點匯總,每個車道設置兩個SN節點可以實現兩點測速。AP節點采用有線供電,為替代線圈并兼容已有設備,AP可以使用RS232,RS485等接口和現場交通控制器通信。
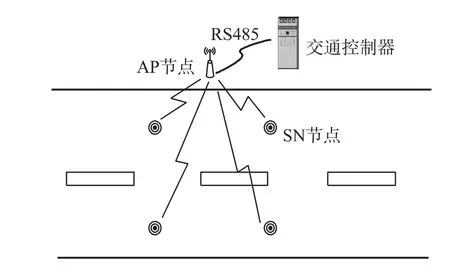
圖1 車輛信息采集系統網絡拓撲
2 硬件設計
SN節點主要由信號采集模塊、處理模塊、無線收發模塊以及能量管理模塊四部分組成,結構如圖2所示。其中MCU對采集模塊的傳感器及信號調理電路采用間歇供電,避免采集空閑時功耗浪費。能量管理模塊自動切換供電源并控制太陽能充電。
2.1 處理和無線收發
處理模塊MCU選用16 bit單片機MSP430F149。MSP430F149具有多種低功耗工作模式,睡眠到喚醒用時極短[9],很適合周期喚醒工作的應用,自帶12bit模數轉換器ADC轉換速率超過200 ksample/s,有助于實現快速信號采集。無線收發模塊使用2.4 GHz射頻芯片nRF24L01P,支持最高2 Mbit/s數據傳輸速率[10],而選用較高傳輸速率有助于降低功耗和減少通信沖突。MSP430F149使用SPI接口與nRF24L01P通信,完成工作模式設定和數據讀寫。
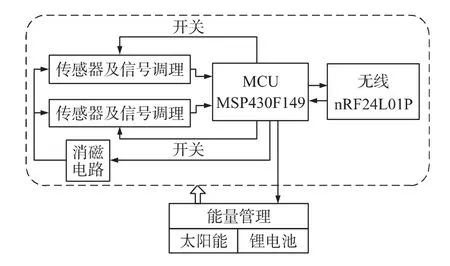
圖2 SN節點組成框圖
2.2 信號采集
信號采集模塊由傳感器,信號調理電路和消磁電路組成,采用兩個AMR磁阻傳感器HMC1021[11]進行檢測。節點采用3.3 V供電,車輛磁擾動范圍為±2 Gauss,傳感器輸出差分信號范圍約±6.6 mV,為便于AD轉換信號還需經調理電路放大約200倍。單軸信號采集電路如圖3所示。其中調理電路的前級放大采用 AD623儀表放大器[12],可提供高輸入阻抗和高共模抑制比,后級使用 OP262運放[13]在放大同時構成有源濾波器,兩個放大器都具有μV級輸入失調電壓及溫漂,噪聲密度較低,能夠有效抑制信號漂移和噪聲。傳感器和調理電路的電源由MCU控制,間歇供電時長包括信號建立時間和模數轉換時間兩部分,其中MCU模數轉換時間已確定,為最小化信號建立時間,需要保證調理電路帶寬足夠大。設置前級放大5倍時可保證AD623帶寬200 kHz,后級放大40倍時OP262帶寬約300 kHz,而傳感器的帶寬高達5 MHz,因此整個信號鏈路帶寬為200 kHz,理論上5 μs即可完成信號建立。考慮到上電時間及濾波電容影響,實際時間應適當增加以確保信號完全建立。
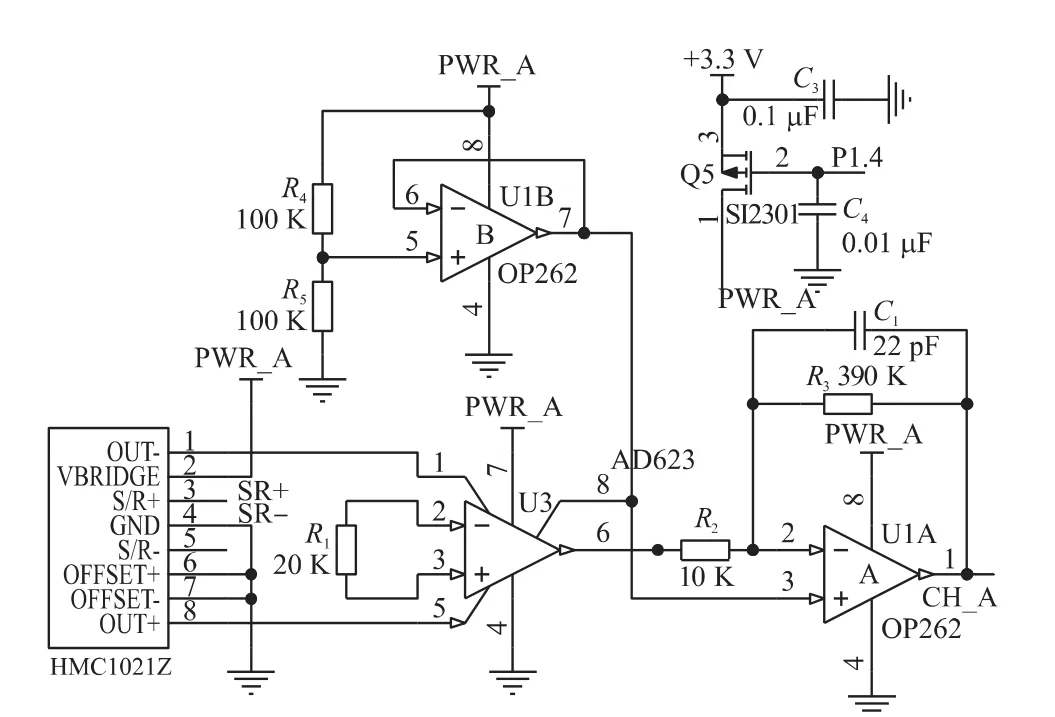
圖3 傳感器及調理電路
磁阻傳感器存在磁滯現象,通過對傳感器置位/復位帶阻施加瞬間強電流可恢復或保持傳感器特性。電源電壓無法提供足夠大電流,因此設計了H橋電路[14]實現雙倍電壓放電效果,如圖4所示。
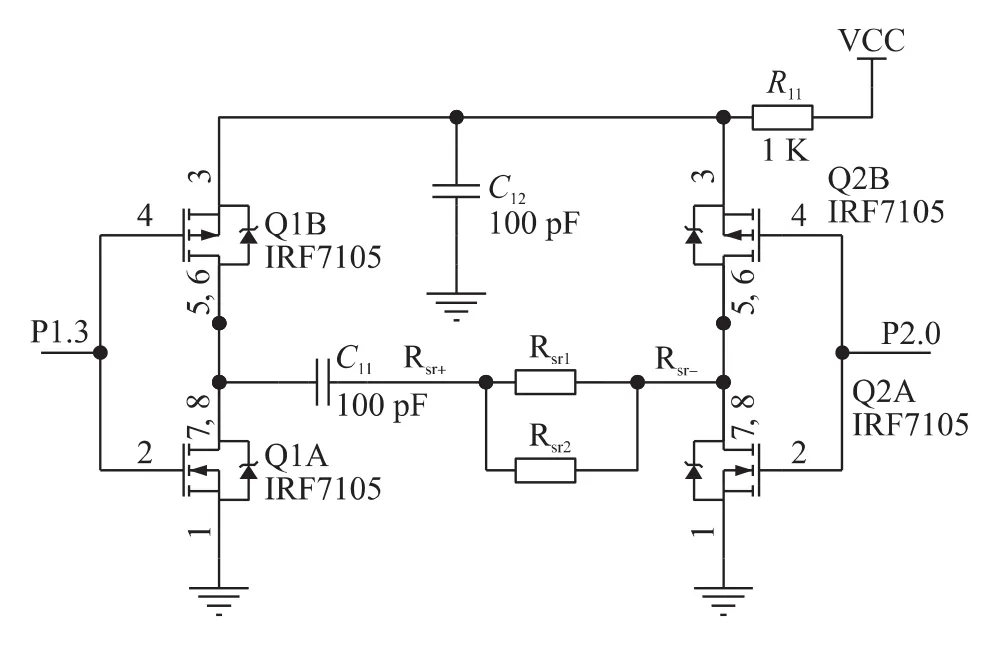
圖4 傳感器置位/復位電路
2.3 能量管理模塊
超級電容充電快且充放電次數無限,鋰電池能量密度高漏電少[15],因此采用超級電容加鋰電池的兩級能量存儲方案,工作原理如圖5所示。夜間或陰雨天光照不足時,超級電容與鋰電池并聯為節供電;光照充足時太陽能充電使電容電壓升高,二極管截止降時,轉為電容單獨供電。選用的太陽能電池板標準電壓為5 V,最大功率0.5 W,鋰電池額定電壓為 3.7 V,充電電壓 4.2 V。選用 5.5 V、1.5 F 的小容量電容,漏電流小且足以支撐節點白天的工作。SS34是肖特基二極管,100 mA下正向壓降僅為0.2 V ~ 0.3 V[16]。XC6206 線性低壓差穩壓器 LDO(Low Drop-Out Regulator)實現3.3 V穩壓供電,LDO輸出紋波小,能夠降低電源對傳感信號的干擾。二極管和LDO上會有一定的能量損耗,當鋰電池工作電壓為4 V時,根據LDO轉換效率計算公式[17]鋰電池電源利用效率可達到82%。
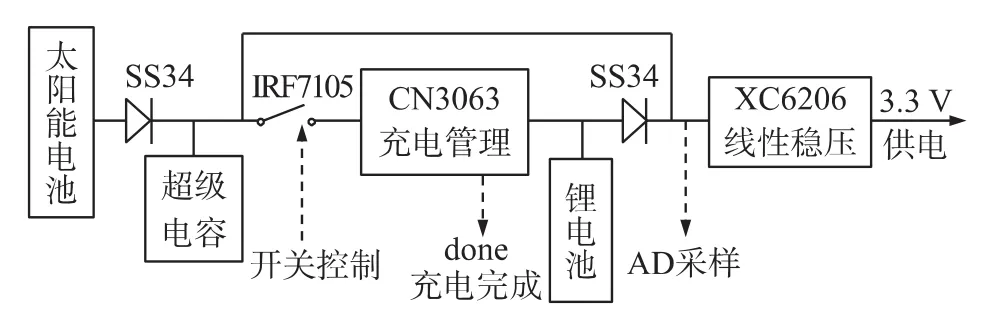
圖5 能量管理模塊原理框圖
LDO輸入端經分壓后輸入到MCU的ADC,實時監測該處電壓可獲知超級電容或鋰電池電量信息。需對鋰電池充電時,MCU控制IRF7105接通充電電路。充電管理芯片CN3063有效充電輸入電壓為4.35 V~6 V,與太陽能電池板輸出匹配,能自動控制鋰電池的預充、恒流以及恒壓充電[18]。
3 無線通信協議設計
3.1 TDMA和時間同步
基于TDMA的MAC協議不存在數據碰撞,空閑時隙能夠及時進入睡眠[19],滿足網絡節能需求的同時還可提供測速所需的時間同步,非常適合車輛信息采集系統。所有節點以AP為時鐘基準,信道在時間上劃分為周期1.25 s的超幀,每個超幀又劃分S0~S127共128個時隙。S0為管理時隙,允許AP向SN節點廣播命令包;S1~S127被分配給各SN節點向AP上傳數據,AP在此期間始終處于監聽狀態。AP對SN發送的所有數據包進行確認,SN收到ACK確認包后執行傳感器網絡時間同步算法[20]TPSN(Timing-Sync Protocol for Sensor Network)計算同步偏差:

式(1)中T1和T4分別是SN發送數據和收到ACK的時間戳,保存在SN節點上;T2和T3是AP收到數據和發送ACK的時間戳,包含在ACK包中。SN定時發送同步包來維持時間同步,由于發送其他數據包時也能實現同步,因此可減少冗余的同步包發送。
3.2 跳頻與節點加入
為提高通信可靠性,降低同頻干擾影響,引入循環跳頻機制。同一網絡內使用相同的信道表和跳頻方法,S1~S127時隙的信道由時隙號計算得到:

式(2)中Nchannel表示信道編號,Nslot為當前時隙號,Nnode是SN節點總數。S0時隙也跳頻,但信道號由超幀號所決定,采用與其他時隙不同的信道表。根據式(2),信道總數為Nnode+1,AP會周期跳至特定信道,因此SN搜索網絡時可以嘗試在某一信道上不斷發送加入請求,若收到ACK則可實現同步并加入,否則隨機退避后再嘗試。信道數大于節點數,節點可從不同信道同時請求接入從而避免競爭,有助于在系統重啟或睡眠喚醒時快速組網。
4 軟件設計
4.1 總體軟件設計
由于SN節點資源及功耗限制不宜采用操作系統,考慮到應用特點以及降耗需要,程序使用時隙驅動的運行方式。SN節點劃分為 WORK、JOIN和SLEEP 3個狀態,每個時隙開始節點喚醒并根據工作狀態進入不同任務處理模塊,處理完成后又進入睡眠。WORK狀態是正常工作狀態,SN與AP保持時間同步,根據時隙號執行不同的任務。SN丟失同步后進入JOIN狀態,執行請求加入流程。需要關閉節點時,AP向SN發出定時睡眠命令使其進入SLEEP狀態,喚醒后節點進入JOIN狀態執行重新加入。
在WORK狀態下節點在每個時隙首先執行采樣及算法檢測,然后根據需要執行通信任務。由于采樣間隔與通信時隙長度一致,因此采樣頻率為102.4 Hz,而車輛信號頻率范圍一般小于 10 Hz[21],較高的采樣率便于獲取更多信息用于測速或車輛分類。SN節點采用了基于狀態機的在線檢測算法[22],算法中時間相關參數均可根據采樣率進行調整,且算法可實時將每輛車到來和離開時間分別上傳AP。
4.2 能量管理策略
硬件中已實現供電源的自動切換,軟件中能量管理僅需完成電源監測和鋰電池充電控制。為避免鋰電池深充深放縮減壽命,設定電量低于70%時進行充電。為充分利用太陽能,充電時需控制太陽能板輸出電壓在其最大功率區內[15],根據所選太陽能板及充電芯片參數,設定控制窗口為4.7 V~5.5 V。充電控制算法用圖6的狀態轉換圖描述。電池電量低于70%即電池電壓低于3.9 V時,LDO的輸入ULDO低于3.7 V,進入待充電狀態。在待充電狀態下,若ULDO大于5.3 V說明此時電容電量充足且光照較好,進入充電狀態。充電中若ULDO降低到4.5 V以下,表明充電條件較差,返回待充電狀態。鋰電池充電到截止電壓4.25 V時,充電芯片輸出DONE信號,停止充電進入滿電量狀態。
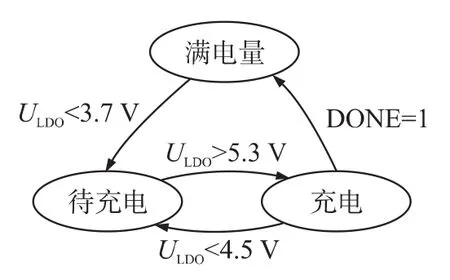
圖6 充電管理算法
5 實驗和結果
5.1 功耗評估
功耗測量方法是在對應模塊的電源端串聯精度1%的10 Ω電阻,用示波器觀察電阻壓降來間接獲取電流波形。以單軸傳感器和信號調理電路為例,單軸間歇供電時間設置為40 μs,電阻上的壓降波形如圖7所示,電壓最大值約50 mV對應最大電流約5 mA。相同方法可測得其他主要模塊功耗。
節點實際功耗與工作模式和車流量相關,評估時設定工作負荷為:采樣頻率102.4 Hz,節點每1 s向AP發送一次,即模擬車流量達到1 800輛/h,能夠滿足大多數路況。在此條件下,經過測量和計算將節點各模塊工作情況以及電流消耗統計如表1所示。電路中一些元件會產生漏電流,這部分功耗極小因此沒有考慮在內。由于采集一次數據工作占空比僅為0.4%,其他能耗較高的模塊工作占空比均小于2%,因此平均電流很小,節點總電流約89 μA。若采用200 mAh容量的電池單獨供電,電源利用效率為80%時可支撐節點連續工作74 d。文獻[6]節點在車流量180輛/h條件下的功耗為0.39 mW,相同條件下本文節點功耗為0.26 mW。文獻[6]節點在無車時功耗極低,但其功耗隨車輛數顯著增加,在1 800輛/h條件下其功耗高達3.9 mW,而本文節點功耗僅為0.29 mW,受車流量影響很小。
圖7 傳感器和信號調理電路的功耗波形
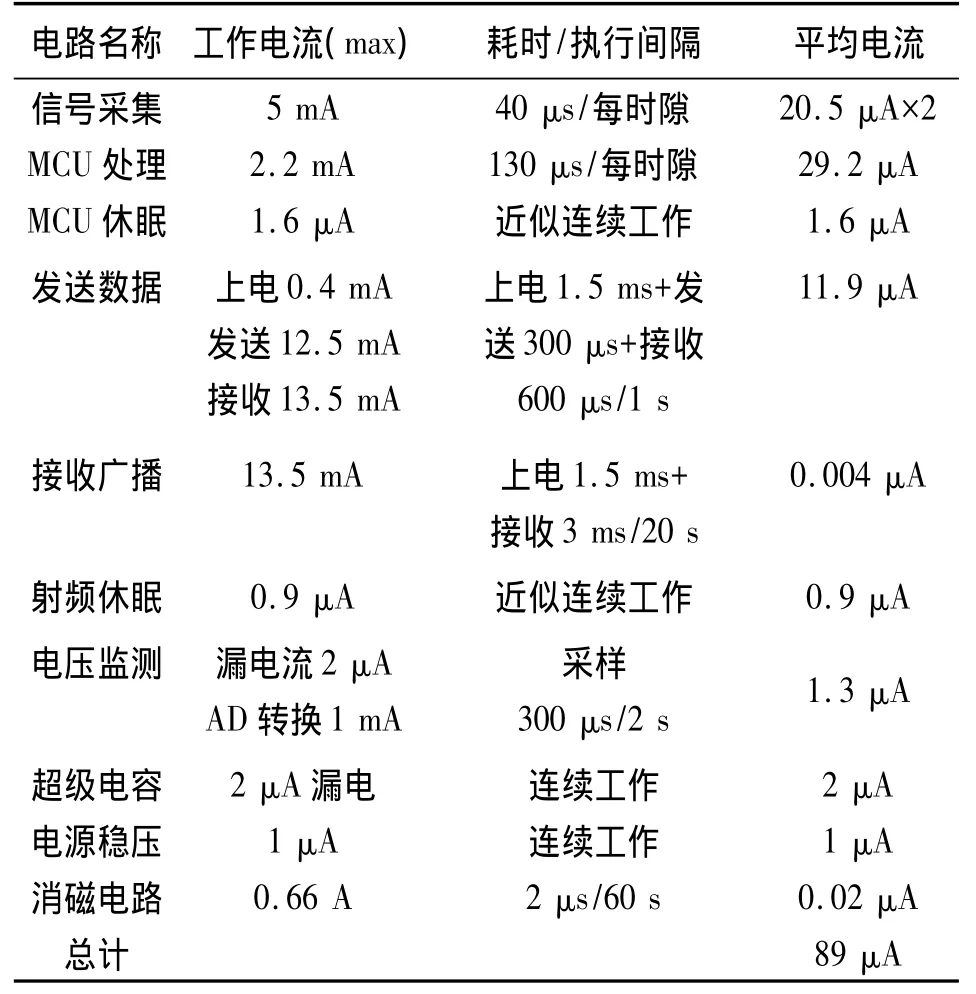
表1 SN節點各模塊的電流消耗
5.2 能量狀態評估
采用超大容量電池雖然可以延長節點壽命,但會使成本增加,體積變大,為此引入太陽能供電,節點實物如圖8所示。用于測試的太陽能板由10片0.5 V光伏電池串聯組成,總面積僅40 cm2,保證了節點小型化。車輛經過雖會短暫遮住節點上方,但總遮蓋時間比例較小并且太陽能板也可利用散射光轉換能量,因此太陽能的獲取受車輛影響小。由于灰塵,雨雪,磨損等因素影響可能導致轉換效率下降,甚至一段時間內無法充電,為避免效率過低采用轉換效率達15%的單晶硅電池,適當增加電池容量來降低節點因長時間無法充電而失效的概率。
圖8 節點實物圖
將節點放在朝北的陽臺上測試白天模擬運行時的能量狀況,節點工作負荷與5.1相同,實驗時間為2013年4月15日,天氣為陰轉多云。圖9記錄了能量管理模塊中主要元件的狀態。早上8:00光伏電池開路電壓為4.3 V,高于鋰電池電壓,節點接上太陽能板后開始充電。16:00之前電容曲線大都處于上升或平穩狀態,且太陽能板電壓多曲線位于電容曲線之上,表明電容大部分時間處在充電或充電飽和狀態。16:00之后光照逐漸變差,但仍可收集太陽能,電容隨太陽能板電壓緩慢下降。17:30左右光照急劇下降,無法收集太陽能,依靠電容剩余電量維持。19:00后電容電壓下降到4.05 V并一直保持,說明已切換為鋰電池供電。實驗雖在模擬負荷下進行,但節點的采樣和處理活動都與實際應用時相同,在整個白天運行期間都保持了穩定。實驗中白天依靠收集太陽能工作的時長達到11 h,雖然實際該時長可能受天氣、季節、地域以及車輛等因素影響,但節點在弱光照條件下顯示出較強的適應能力,對鋰電池的依賴程度極大降低。
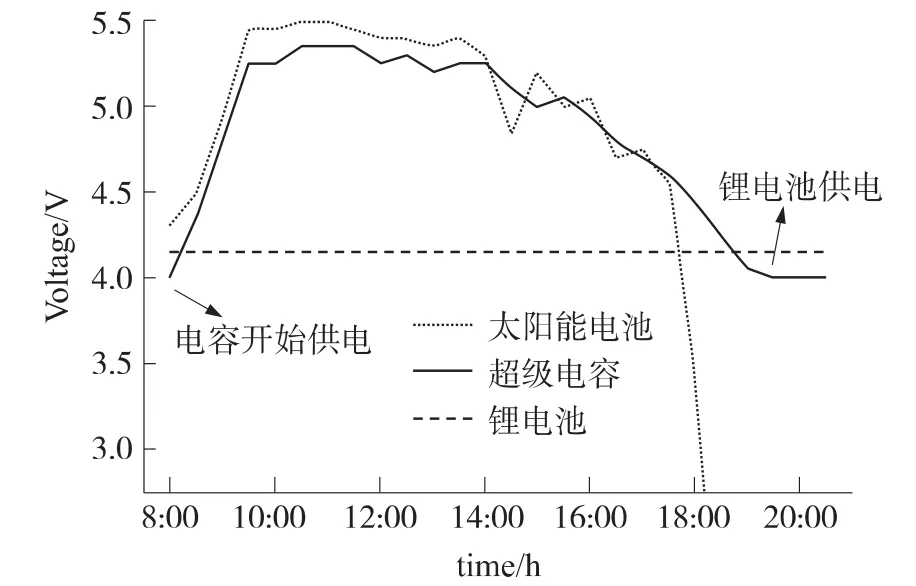
圖9 節點運行時的能量狀況
查閱相關氣象數據[23],哈爾濱等東北城市冬季正午時水平面上的平均太陽輻照度超過400 W/m2,假設實際太陽能轉換效率為7%,充電效率和電源利用效率按80%計算,可獲得有效功率71.68 mW;節點功耗為0.29 mW時,一個晴天內充電2 h即可滿足至少20 d工作所需能量,由此看出節點工作具有很好的可持續性。
5.3 在線車輛檢測
用節點在不同地方進行實地測試,地點1在浙江大學玉泉校區正門出口,地點2在杭州玉古路南段,測試時車輛從SN節點上方駛過,AP收到SN發送的檢測結果并用串口上傳筆記本電腦實時顯示,檢測結果如表2所示。結果中虛檢是影響準確率的主要原因,而虛檢車輛是車速低且車速不均引起的誤判,地點一車速較低因此虛檢率也比地點二而高。由于檢測算法的參數適用于一定的速度區間,后續工作還需要對算法改進來增強適用性。

表2 實地車輛檢測結果
6 結論
本文提出了一種利用太陽能自供電的磁阻車輛檢測節點設計方法。針對傳感能耗設計了快速信號采集電路來提高能量利用效率,針對通信能耗采用專門定制的無線通信協議來減少通信次數和避免數據碰撞,車流量達到1 800輛/h時節點平均功耗可以控制在0.29 mW以內。加入太陽能自供電模塊后的評估表明節點可依靠外部能量持續工作,解決了節點壽命受電源限制的問題。由于功耗低且能量供給較充裕,采樣頻率、通信數據量以及檢測算法復雜度仍有進一步提高的余地,節點經過進一步小型化和工程化還可以用于超速檢測以及車輛分類檢測等復雜應用,在智能交通信息采集方面具有很高的實用性和可擴展性。
[1] 楊曉明,李宗津.基于水泥基壓電傳感器的車輛監測研究[J].傳感技術學報,2013,26(2):266-270.
[2] 張豫鶴,黃希,崔莉,等.面向交通信息采集的無線傳感器網絡節點[J].計算機研究與發展,2008,45(1):110-118.
[3] Isaksson M.Vehicle Detection Using Anisotropic Magnetoresistors[R].Chalmers University of Technology,Sweden,2008.
[4] 楊波,鄒富強.異向性磁阻傳感器檢測車流量的新方法[J].浙江大學學報(工學版),2011,45(12):2109-2114.
[5] Kanathantip P,Kumwilaisak W,Chinrungrueng J.Robust Vehicle Detection Algorithm with Magnetic Sensor[C]//International Conference on Electrical Engineering/Electronic Computer Telecommunications and Information Technology,2010:1060-1064.
[6] Sifuentes E,Casas O,Pallas-Areny R.Wireless Magnetic Sensor Node for Vehicle Detection with Optical Wake-Up[J].Sensors Journal,2011,11(8):1669-1676.
[7] 郭鵬.應用于交通參數監測的無線網絡傳感器研究[D].北京:中國科學研究院,2007.
[8] Eliasson J,Birk W.Towards Road Surface Monitoring:Experiments and Technical Challenges[C]//Control Applications(CCA)and Intelligent Control(ISIC),IEEE,2009:655-659.
[9] Texas Instruments.MSP430F149 Datasheet[EB/OL].http://www.ti.com.cn/cn/lit/ds/symlink/msp430f149.pdf.
[10] Nordic Semiconductor.nRF24L01P Datasheet[EB/OL].http://www.nordicsemi.com/eng/content/download/2726/34069/file/nRF24L01P_Product_Specification_1_0.pdf.
[11] Honeywell.HMC1021 Dataheet[EB/OL].http://www.honeywell.com/aero/common/documents/myaerospacecatalog-documents/Missiles-Munitions/HMC_1001-1002-1021-1022_Data_Sheet.pdf.
[12] Analog Device.AD623Datasheet.[EB/OL].http://www.analog.com/static/imported-files/data_sheets/AD623.pdf.
[13] Analog Device.OP262Datasheet.[EB/OL].http://www.analog.com/static/imported-files/data_sheets/OP162_262_462.pdf.
[14] Set/Reset Function for Magnetic Sensors[EB/OL].http://magneticsensors.com/literature.php.
[15]張靜靜,趙澤,陳海明,等.一種高效的太陽能傳感器網絡節點系統設計與實現[J].儀器儀表學報,2012,33(9):1954-1960.
[16] Vishay.SS32S_SS33S_SS34S Datasheet.[EB/OL].http://www.vishay.com/docs/89927/ss32s.pdf.
[17]黃繼昌,仝慶居,喬蘇文,等.電源專用集成電路及其應用[M].北京:人民郵電出版社,2006:1-3.
[18] Consonance Electronics.CN3063 Datasheet[EB/OL].http://www.consonance-elec.com/seriesCN3063.htm.
[19]于凱,謝志軍,金光,等.基于功率控制的無線傳感器網絡MAC協議研究[J].傳感技術學報,2013,26(9):1297-1302.
[20]孫立民,李建中,陳渝,等.無線傳感器網絡[M].北京:清華大學出版社,2005.
[21] Lan Jinhui,Shi Yuqiao.Vehicle Detection and Recognition Based on a MEMS Magnetic Sensor[C]//4th IEEE International Conference on Nano/Micro Engineered and Molecular Systems,2009:404-408.
[22] Cheung S Y,Varaiya P.Traffic Surveillance by Wireless Sensor Networks:Final Report[R].University of California,Berkeley,Jan.2007.
[23]民用建筑熱工設計規范(GB50176—93)[S].北京:中國建筑科學研究院,1993.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
