仿生復眼光學偏振傳感器及其大氣偏振E矢量檢測應用*
2013-06-20 03:12:28丁宇凱王晨光曹衛達周智君趙鵬飛
傳感技術學報 2013年12期
丁宇凱,唐 軍,王 飛,王晨光,翟 超,曹衛達,周智君,趙鵬飛,劉 俊*
(1.中北大學儀器科學與動態測試教育部重點實驗室,太原030051;2.中北大學電子測試技術重點實驗室,太原030051)
太陽光在傳輸過程中由于大氣的散射作用而產生偏振光,并形成的特定的偏振態分布,即大氣偏振模式[1]。大氣偏振模式具有以太陽子午線對稱分布的特性,包含了豐富的方向和位置信息。人眼看不到光的偏振現象,但是許多生物,如沙蟻、蜜蜂等[2-3],卻能夠利用大氣的偏振模式分布特性來進行精確的導航定位[4]。
現有研究表明,E-矢量作為其導航的信息來源,具有較好的穩定性[5],對大氣偏振模式中E-矢量的提取是實現偏振光導航定位的關鍵。瑞士研究者用偏振器件模仿生物復眼測量光的偏振,并且在移動機器人上構建的偏振羅盤獲得了成功應用[6]。國內大連理工大學褚金奎教授在此基礎上對仿生光電模型進行了系統的性能測試并對模型進行了微型化研究[7-8]。合肥工業大學的高雋教授提出一種仿生偏振信息檢測方法[5,9]。
本文以沙蟻等生物高度敏感的偏振視覺感知與導航功能為生物基礎,結合電子技術、機械加工技術及信號處理技術設計研制出一種仿生復眼光學偏振傳感器,并使用此偏振傳感器在不同天氣下對天頂方向偏振光E-矢量方向進行長時間的檢測來反應大氣偏振模式E-矢量的變化。
1 仿生偏振光導航傳感器的設計
通過對多種昆蟲復眼結構的研究表明[10-11],復眼背部邊緣區域DRA(Dorsal Rim Area)普遍具有高偏振敏感現象,DRA區域的小眼正對天空方向,DRA區域中的偏振敏感神經元(POL-神經元),對光的E-矢量刺激都具有近似正弦函數的響應,每隔90°神經元興奮或抑制交替變化[12]。這些神經元具有偏振對抗的特性[13],接收與DRA小眼中微絨毛方向相互垂直的光感受器的對抗輸入,這些光感受器調諧的E-矢量方向正交,因此DRA也稱為POL區域。
傳感器的設計依照復眼DRA區域中的小眼進行,通過模仿小眼的主要功能,將傳感器分為:(1)偏振檢測模塊,實現生物體微絨毛對光的偏振方向的選擇作用;(2)光電轉換模塊,負責將光強轉換為電流信號;(3)對數運算模塊,對兩路偏振信號進行對數處理,實現POL神經元的功能,增強輸出響應,提高檢測的精度、靈敏度[14-15]。
生物模型到傳感器的工作過程如圖1所示。
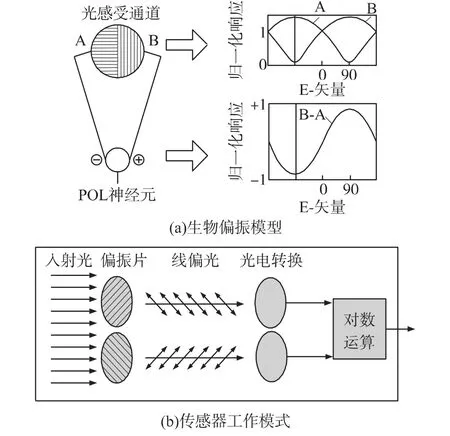
圖1 生物模型到傳感器的工作過程
大氣中的光為經過瑞利散射后的部分偏振光,部分偏振光通過偏振檢測單元后的光強可以表示如下:

式(1)中,I是總光強,d是偏振度,θ是偏振片偏振透過方向與參考方向的夾角,θmax是入射光的偏振方向相對同一參考方向的夾角,K為一常數,由偏振器件的透過率消光比決定。為討論方便,取感知單元中水平通道的偏振片的極化方向為參考方向。
偏振光分別經過一對偏振透射相互垂直的偏振傳感單元后的輸出為:

經過對數運算后的結果如下:

由式(4)類推,第二組檢測單元輸出可表示為:

為了簡化計算,對式(4)和式(5)采用S型函數進行去對數處理,即:

通過式(4)~式(6)可知,偏振檢測通道信號幅值只與偏振度和偏振角相關,則可求得偏振角θ為:

偏振度d可表示為:

根據昆蟲小眼的結構及POL處理信號的原理設計的傳感器主要由偏振檢測單元、光電轉換模塊、信號處理模塊(包括對數運算、信號放大、濾波)以及數據采集、解算模塊組成,如圖2所示。
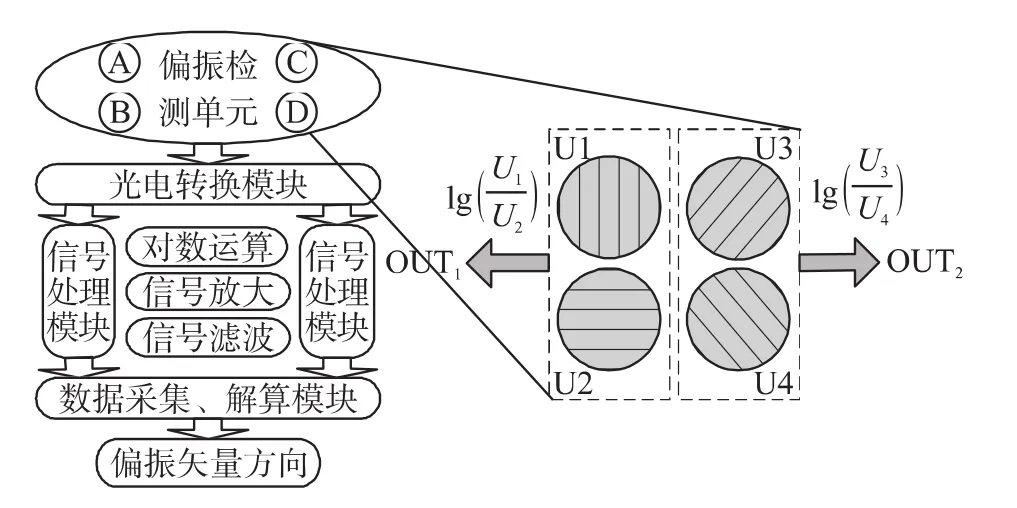
圖2 四通道偏振光傳感器基本結構
偏振光檢測單元中,將檢偏器件平鋪在兩路通道的上方,每路通道都有兩個偏振片和帶刻度的套筒組成。依據POL神經元處理方式,將兩路通道的相對起偏角度設置為60°,每個通道中兩路檢偏器件偏振方向相互垂直,以第一個通道的第一個偏振片為參考0°,則另外3個偏振方向分別為60°,90°和120°,各通道偏振片的方向如圖2所示。
為了能夠接收正天頂方向的光信息,在每路檢偏器件的下方2 cm處,都有一支光電二極管,并在偏振器件與光電二極管之間的通道壁上涂黑色吸光涂層。二極管用以接收通過檢偏器件后的光信號,并將光信號轉換為電流信號,作為信號處理的輸入信號。
在傳感器底部空間(如圖3中左圖)安裝信號處理硬件電路,用以實現傳感器中對數運算電路,信號放大電路。兩組對數運算放大器分別將兩路通道中的四支光電二極管輸出的電流信號進行歸一化處理,轉化為易于處理的兩路電壓信號。此時電壓信號很小,一般為毫伏級甚至更小,不滿足后續信號的采集,需要對信號進行放大處理,將信號放大至0~5 V的范圍內,方便后續的數據采集。由于在信號采集過程中會有交流信號對電路產生高頻的電磁干擾,產生噪聲,需要對信號進行濾波處理,濾除高頻信號。
通過數據采集卡,對測試輸出信號進行采集、存儲。數據的處理利用MATLAB完成,結合數字濾波器以及式(1)~式(8)進行偏振角的求解以及誤差計算。

圖3 傳感器結構及實物
2 偏振傳感器的測試及大氣偏振檢測
2.1 偏振傳感器測試實驗
選擇晴朗無云的天氣進行室外實驗,考慮到大氣偏振態的變化速率慢,可以認為天頂區域光的偏振方向在短時間內不變,將傳感器固定在水平轉臺上,轉臺的轉速由PCM100步進電機控制器控制,本處設置為32 s/r,設置采集卡采樣頻率為100 Hz,啟動轉臺的同時,數據采集卡開始采集傳感器的模擬電壓值。實驗平臺原理圖如圖4所示。
如圖5,采集卡從傳感器兩個通道采集到的兩組數據,由圖5(a)可以看出隨著轉臺旋轉,傳感器的兩組偏振檢測單元的輸出基本近似為正弦曲線,相位差為60°。
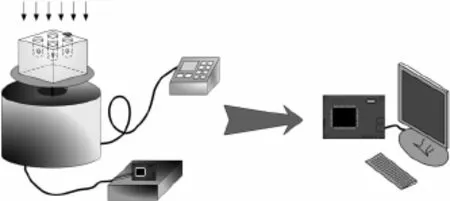
圖4 傳感器實驗測試平臺原理圖
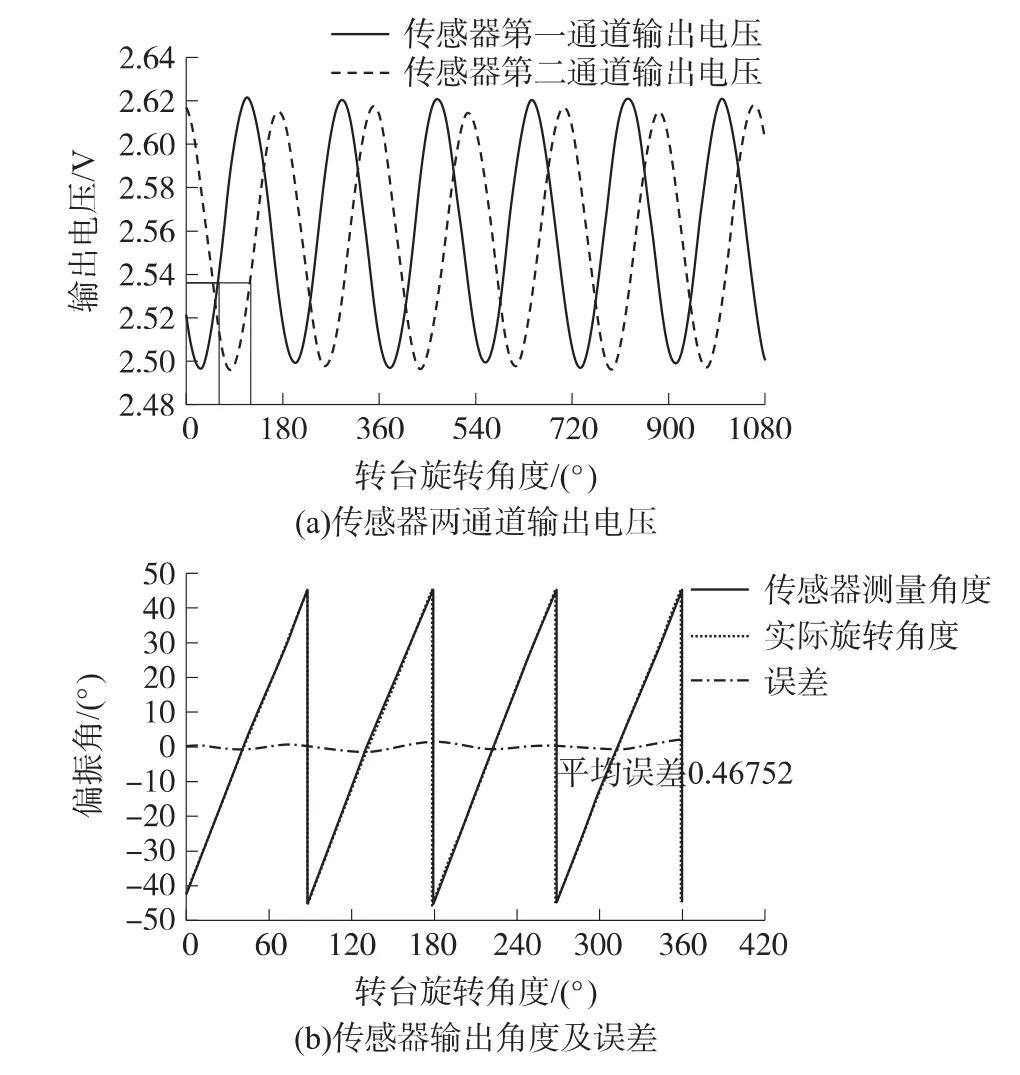
圖5 傳感器測試輸出及誤差
將采集到的兩路信號進行數據處理與分析,利用式(7)通過MATLAB求解出偏振角,由式(7)可知,求解出的偏振角(以傳感器的偏振檢測單元的極化方向為水平的偏振片為基準)是arctan函數,以90°為一個周期,以選取求解出的第一個最小偏振角為參考點,將傳感器的實際轉動角度也變為一個以90°周期的函數曲線,如圖5(b)中虛線所示,實線為傳感器的測量值,兩者之間的誤差輸出為長短線所示,平均誤差 0.4675°。
由實驗數據可知所設計偏振光傳感器在功能上實現了偏振檢測的功能,通過轉臺的實際測量表明,偏振傳感器的測量具有一定的精度,能夠作為導航傳感器提供航向角的能力。
2.2 大氣偏振模式檢測應用
由大氣偏振態的分布可知,天頂方向上E-矢量方向與觀測點與太陽子午線所成的角度正交,一天中太陽方位角的不斷變化,固定位置天頂方向上的E-矢量方向也在不斷變化,分別選取了2013年5月25日和2013年6月14日,利用偏振態分析儀和本文所設計的偏振光傳感器通過在不同天氣下對天頂方向上的E-矢量方向測試來實現對大氣偏振E-矢量實際分布的檢測與分析。
測量地點在中北大學科研樓進行(東經112°33'、北緯37°47'、時區 UTC+8、海拔 800 m),由天文學相關公式[16],可以通過時間,時區、經、緯度、海拔,準確解算出該時刻下的太陽的方位角,再結合瑞利散射模型,可以求解出該時刻天頂方向的E-矢量方向與參考方向的夾角。實驗采用THORLABS PAX5710VIS-T偏振態測試儀(設置采樣為600/h)和本文設計的傳感器,對不同天氣下同一點的天頂方向進行測試。選取正東方向為參考0°方向,面向天頂方向,逆時針轉動方向為正,順時針轉動方向為負,從7:00~19:00每隔0.5 h采集一次。
由圖6可以看出,在晴朗天氣下偏振光傳感器測得數據,與偏振態分析儀測得數據有較強的一致性;偏振態分析儀、傳感器采集到的數據之間誤差基本不超過1°;但兩者測得數據與理想大氣偏振模式下的E-矢量方向有比較明顯的差別,尤其在9:00~14:00時差別很大,在12:30最大甚至能達到15°,這是由于在正午時刻太陽高度角最大,陽光直射較為明顯,偏振度較小,同時天空少量云層、微粒會對測量產生影響。
而圖7中,偏振態分析儀和偏振光傳感器在多云天氣下對E-矢量的檢測都受到了影響,尤其是在10:30~13:30和17:00~19:00這段時間內,有云層遮擋在分析儀和傳感器正上方,對偏振E-矢量的檢測產生了非常大的干擾。測得的數據和理想的E-矢量方向的誤差最大達到30多度,雖然傳感器在某一時段受到了比較大的影響,但在沒有云層遮擋后,又能很快的從混亂中恢復,誤差不會隨時間累積,所以偏振光傳感器能夠作為工具來為導航提供航向角信息。
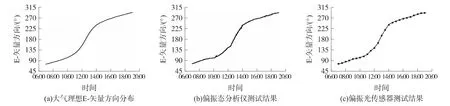
圖6 晴朗天氣下,大氣理想E-矢量方向、偏振態分析儀和偏振光傳感器的測試結果對比
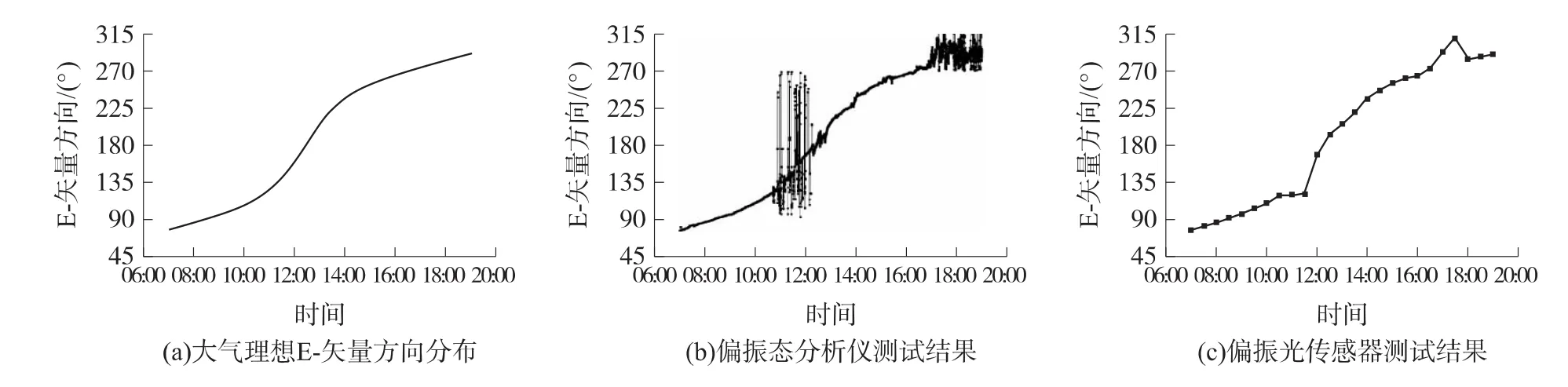
圖7 多云天氣下,大氣理想E-矢量方向、偏振態分析儀和偏振光傳感器的測試結果對比
3 結論
本文首先從仿生學出發,詳述了昆蟲利用偏振光導航的基本原理,并根據昆蟲復眼的基本結構從傳感器的結構設計、硬件電路設計、數據信號處理等方面介紹了傳感器的設計及偏振E-矢量的檢測過程。并利用設計的傳感器與偏振態分析儀分別在多云天氣和晴朗天氣下對大氣偏振E-矢量方向進行了檢測,測得數據與大氣偏振E-矢量理論值進行了對比,結果表明該傳感器能對大氣偏振模式進行測量。后期還將進行大量的實驗,并嘗試通過多種誤差補償的方式,對傳感器測得數據進行矯正,并結合一定的系統建立更精確、穩定、便攜的傳感系統。
[1] Berry M,Dennis M,Lee R.Polarization singularities in the clear sky[J].New J Phys,2004,6:1-14.
[2] Knaden M,Wehner R.Ant navigation:resetting the path integrator[J].The Journal of Experimental Biology,2006,209:26-31.
[3] Wolf H.Wehner R.Desert ants compensate for navigation uncertainty[J].The Journal of Experimental Biology,2005,208:4223-4230.
[4] 劉利兵,金仁成,趙開春,等.一種基于ARM的仿生偏振光測試系統的研究[J].傳感技術學報,2006,19(5):1788-1791.
[5] 吳良海,高雋,范之國,等.一種大氣偏振信息檢測算法的實現與分析[J].儀器儀表學報,2009,30(6):102-105.
[6] Lambrinos D,Moller R,Labhart T.A mobile robot employing insect strategies for navigation[J].Robotics and Autonomous System,2000,30(1):39-64.
[7] 褚金奎,趙開春.仿昆蟲復眼偏振敏感測角光電模型研究[J].納米器件與技術,2005(12):541-545.
[8] 張娜,褚金奎,趙開春,等.基于嚴格耦合波理論的亞波長金屬光柵偏振器設計[J].傳感技術學報,2006,19(5):1739-1743.
[9] 范之國,高雋,胡翊.基于POL一神經元的大氣偏振信息檢測系統的設計與實現[J].儀器儀表學報,2008,29(4):799-803.
[10] Seidl R,Kaiser W.Visual field size binocular domain and the ommatidial array of the compound eyes in worker honey bees[J].Comp Physiol,2001,143:17-26.
[11] Duparré J,Wippermann F.Microoptical artificial compound eyes from design to experimental verification of two different concepts[J].SPIE,2005,65:5962-5971.
[12]許琰,嚴樹華,周春雷,等.昆蟲復眼的仿生研究進展[J].光學技術,2006,32:10-12.
[13] Labhart T.Polarization-sensitive interneurons in the optic lobe of the desert ant cataglyphis bicolor[J].Naturwissenschaften,2000,87:133-136.
[14] Uwe Homberg1,Stanley Heinze,Keram Pfeiffer.Central neural coding of sky polarization in insects[J].Phil Trans R Soc B,2011,366:680-687.
[15] 范寧生.基于POL-神經元的仿生偏振光導航傳感器研究[D].合肥:合肥工業大學信號與信息處理,2011.
[16]王文武,孫楓,劉承香,等.太陽系天體視位置的長期計算法[J].哈爾濱工程大學學報,2000,21(5):18-23.
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
