微型電動汽車用開關(guān)磁阻電動機的設計與控制
2013-06-19 09:09:04張戰(zhàn)超朱孝勇劉修福
微特電機 2013年3期
關(guān)鍵詞:優(yōu)化
張戰(zhàn)超,全 力,朱孝勇,張 超,劉修福
(江蘇大學,江蘇鎮(zhèn)江212013)
0 引 言
近年來,隨著能源短缺和環(huán)境污染問題日益突出,電動汽車以其高效率、零排放等顯著優(yōu)點,成為世界著名汽車制造商和研究機構(gòu)的研究熱點之一。從電動汽車產(chǎn)品的運行速度、功率等級、動力性能和品質(zhì)等進行區(qū)分,電動汽車可分為高端電動汽車和微型電動汽車。所謂微型電動汽車是指最高時速低于50 km,整車重量低于600 kg,一次充電續(xù)航里程為70~130 km一類純電動汽車。由于微型電動汽車具有體積小、質(zhì)量輕、價格低、低速性能好等優(yōu)點,是一種特別適合我國中小型城市以及廣大農(nóng)村運行的短途交通工具,一經(jīng)出現(xiàn),便受到了國內(nèi)相關(guān)領(lǐng)域企業(yè)和學者的重視。
與普通微型汽車相比,微型電動汽車減少了發(fā)動機動力系統(tǒng),包括減速箱、起動電機、水冷卻和油箱等部件,增加了電機、驅(qū)動控制系統(tǒng)和充電系統(tǒng)。駕駛、制動、燈光、儀表等系統(tǒng)基本保持不變。考慮到微型電動汽車相當于自動擋,無需變速系統(tǒng),且存在頻繁起動、加速、巡航、減速、爬坡等運行工況,并且微型電動汽車一般仍采用鉛酸電池供電,電壓等級一般為48 V、60 V、72 V,這對微型電動汽車的電機及控制系統(tǒng),特別是低壓起動性能提出了更高要求。
開關(guān)磁阻電動機(以下簡稱SRM)具有結(jié)構(gòu)簡單、低壓起動性能好、調(diào)速范圍寬,而且在整個調(diào)速范圍內(nèi)都具有效率較高、維護成本低、系統(tǒng)可靠性高等優(yōu)點,但較大的轉(zhuǎn)矩脈動抑制了它在低速領(lǐng)域中的應用[1-4]。本文以微型電動汽車整體動力性能參數(shù)為依據(jù),設計一款工作在低壓大電流狀態(tài)下的SRM,通過采用有限元法分析優(yōu)化電機結(jié)構(gòu),并結(jié)合MATLAB動態(tài)調(diào)速系統(tǒng)仿真的結(jié)果選取最優(yōu)的開通角和關(guān)斷角,以減小轉(zhuǎn)矩脈動,實現(xiàn)電動汽車的穩(wěn)定運行。仿真和試驗結(jié)果表明,微型電動汽車可實現(xiàn)快響應、強爬坡能力、低速性能穩(wěn)定的特性,在微型電動汽車領(lǐng)域具有潛在的應用前景。
1 SRM性能參數(shù)確定
微型電動汽車采用輕型、微型化的設計理念,不僅可以大大提高整車的動力性,同時還可以顯著降低整車的成本。初步設定微型電動汽車整車參數(shù):整車質(zhì)量600 kg,最大承載質(zhì)量300 kg,風阻力系數(shù)0.32,滾動阻力系數(shù) 0.012,迎風面積 1.8 m2,車輪滾動半徑0.23 m,傳動效率0.9,常規(guī)車速30 km/h,最高車速 50 km/h,主減速比 3.56,傳動比 1.5,續(xù)駛里程不小于100 km,最大爬坡度20%。電機是微型電動汽車驅(qū)動系統(tǒng)的關(guān)鍵部件,它的選型和設計對整車的性能起到?jīng)Q定性的作用。以下是電機重要基本參數(shù)確定的依據(jù)。
以最高車速計算SRM的額定功率:

式中:G為汽車總重量;fr為滾動阻力系數(shù);CD為迎風阻力系數(shù);A為迎風面積;η為系統(tǒng)總效率;Vma為電動汽車的最高車速。
以常規(guī)車速計算SRM的額定轉(zhuǎn)速:

式中:i0為主減速比;ig為傳動比;uN為常規(guī)車速;r為運行車輪半徑,nN為SRM的額定轉(zhuǎn)速。
以額定功率/轉(zhuǎn)速計算SRM的額定轉(zhuǎn)矩:

式中:TN為額定轉(zhuǎn)矩。
以最大爬坡度計算其負載轉(zhuǎn)矩:電動汽車行駛中,蓄電池輸出的電能傳送給電動機,電動機輸出的動力用于克服微型電動汽車本身的機械裝置的內(nèi)阻力以及行駛時的外阻力。以此從動力學角度分析,依據(jù)車輛運行中力的平衡方程:驅(qū)動力=總阻力,微型電動汽車行駛過程中的總阻力:

式中:Ft為微型電動汽車驅(qū)動力;Ff為微型電動汽車運行時的滾動阻力,F(xiàn)f=mgfcos α;Fw為微型電動汽車運行時的空氣阻力Fi為微型電動汽車運行時的坡道阻力,F(xiàn)i=mgsin α,α為爬坡角度值。
然后依據(jù)車輛驅(qū)動力與SRM的輸出轉(zhuǎn)矩關(guān)系式,便可計算出電動汽車所需要的轉(zhuǎn)矩:

綜合分析、計算滿足所需動力系統(tǒng)要求的SRM參數(shù):額定功率3 kW ,最高功率7 kW,額定轉(zhuǎn)速1 850 r/min,最大轉(zhuǎn)速3 100 r/min,額定轉(zhuǎn)矩15.5 N·m,最高轉(zhuǎn)矩60 N·m。
2 SRM結(jié)構(gòu)參數(shù)的優(yōu)化設計
2.1 SRM結(jié)構(gòu)參數(shù)
SRM的工作原理與機構(gòu)不同于傳統(tǒng)的電動機,設計時不能簡單照搬傳統(tǒng)電動機設計中所運用的公式和方法。目前,通過采用不同的簡化模型,得到不同的電磁轉(zhuǎn)矩計算方法,形成線性方法、非線性方法、準非線性方法三類不同的設計方法。本文采用準非線性方法進行設計,利用盡可能精確地最大電感位置和最小電感位置的磁化曲線等來計算平均轉(zhuǎn)矩的方法作為出發(fā)點,建立其電磁設計方法,這種方法計算結(jié)果更準確,考慮到對SRM性能影響較大的結(jié)構(gòu)參數(shù)主要有定子外徑、轉(zhuǎn)子外徑、氣隙大小、鐵心長度和定、轉(zhuǎn)子的相對極弧寬度,而且定、轉(zhuǎn)子幾何尺寸對轉(zhuǎn)矩脈動和噪聲有重要的影響。所以要從優(yōu)化定子結(jié)構(gòu)、優(yōu)化轉(zhuǎn)子結(jié)構(gòu)和尺寸、優(yōu)化極弧這三個方面來對電機進行設計。在滿足微型電動汽車動力需求的同時,得到最佳的電機性能。
2.2 SRM性能分析與優(yōu)化
由于SRM磁路的嚴重非線性,各物理量與轉(zhuǎn)子位置、電流之間是非線性關(guān)系,這給模擬電機的實際運行狀態(tài)帶來不便,而有限元能夠考慮到磁路的不規(guī)則性,計算精度較高[5-6]。本文假設所有導線電流密度均勻分布,忽略位移電流,且鐵心磁導率各向同性,對SRM進行瞬態(tài)和穩(wěn)態(tài)的有限元分析,這使得仿真結(jié)果更加接近電機實際運行的狀況,更為精確地反映了電機的整體性能。
圖1為轉(zhuǎn)子凸極軸線與定子凸極軸線重合時磁場分布情況,此時相繞組的電感值最大;在轉(zhuǎn)子極間中心線線與定子磁極軸線重合時,相繞組電感值最小,電機轉(zhuǎn)動時,相繞組電感在最小和最大值之間周期性變化。依據(jù)不同時刻電感值不同,可對電機的輸出性能進行控制。

圖1 對齊位置磁場分布
圖2 是SRM的繞組磁鏈曲線簇,曲線從下往上對應的是 0°、30°、40°、50°~ 180°位置角下激磁繞組磁鏈與之相應的激磁電流的關(guān)系曲線圖,變化趨勢表明磁鏈隨電流的增加而增大,最后達到飽和狀態(tài)。由此可得到特定電流在不同位置時的磁鏈大小,為構(gòu)建驅(qū)動控制提供了依據(jù)。

圖2 SRM繞組磁鏈的曲線族
圖3為SRM優(yōu)化前后瞬態(tài)效率曲線。在1 000~4 000 r/min轉(zhuǎn)速階段,電機的效率均在85%以上,優(yōu)化后在額定轉(zhuǎn)速附近效率均在90%以上,電機效率較高;這不僅使微型電動汽車運行在非額定狀態(tài)滿足起動加速、低速爬坡及高速運行的需要,還能夠?qū)崿F(xiàn)能量的有效利用。

圖3 SRM效率曲線
圖4 為SRM優(yōu)化前后瞬態(tài)輸出功率曲線。電機轉(zhuǎn)速在其額定轉(zhuǎn)速1 850 r/min左右,其輸出功率均在3 kW以上;轉(zhuǎn)速能達到6 000 r/min左右為此類電機固有機械特性,優(yōu)化后電機在額定工作狀態(tài)下輸出功率最大,能克服微型電動汽車因過載對電機造成的損毀。

圖4 SRM功率曲線
圖5 為SRM優(yōu)化前后運行在1 850 r/min時穩(wěn)態(tài)轉(zhuǎn)矩出力曲線。平均轉(zhuǎn)矩在16 N·m左右,優(yōu)化前電機轉(zhuǎn)矩脈動系數(shù)為0.65,優(yōu)化后轉(zhuǎn)矩脈動系數(shù)為0.32,轉(zhuǎn)矩脈動明顯減小。這既能完全滿足負載需要,又可使微型電動汽車運行平穩(wěn),提高了安全性能。
SRM采用6/4結(jié)構(gòu),電源電壓選用48 V直流電,經(jīng)優(yōu)化分析得到優(yōu)化后電機的主要結(jié)構(gòu)參數(shù)尺寸如表1表示。
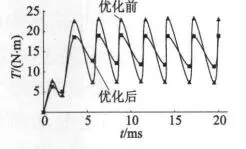
圖5 SRM轉(zhuǎn)矩曲線
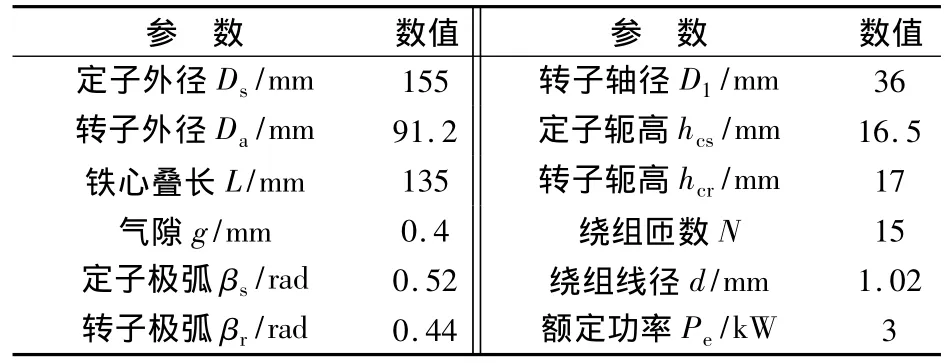
表1 SRM主要參數(shù)
3 動態(tài)仿真
3.1 驅(qū)動系統(tǒng)建模
為了更進一步減小轉(zhuǎn)矩脈動[7-10],分析微型電動汽車不同工況下的電機性能。本文在MATLAB/Simulink模塊對電機的控制系統(tǒng)進行建模,以提高控制策略的靈活性。模型主要包括:功率變換器模塊、速度PI調(diào)節(jié)模塊、電機本體模塊、電流滯環(huán)和位置檢測模塊等,其中電機本體模塊參數(shù)部分是有限元分析的結(jié)果經(jīng)計算得到的電機定子磁阻、不同位置下定子電感、轉(zhuǎn)動慣性系數(shù)、摩擦系數(shù)、起始位置和速度等參數(shù);PI調(diào)節(jié)模塊中kp為PI控制器中 P
(比例)的參數(shù),kI為PI控制器中I(積分)的參數(shù),經(jīng)幾組數(shù)據(jù)對比得,調(diào)節(jié)器的最終參數(shù)設置為:kP=1.5,kI=0.015。
SRM采用雙閉環(huán)調(diào)速系統(tǒng),即速度閉環(huán)和電流閉環(huán),轉(zhuǎn)速反饋調(diào)節(jié)當作外環(huán),用來保證SRM的轉(zhuǎn)速快速準確跟隨設定轉(zhuǎn)速,同時電流反饋當為內(nèi)環(huán),即將轉(zhuǎn)速PI調(diào)節(jié)的輸出值作為電流PI調(diào)節(jié)的輸入,然后用電流PI調(diào)節(jié)的輸出對功率變換器實行控制,這就實現(xiàn)了轉(zhuǎn)速-電流雙閉環(huán)調(diào)速。電機起動或低速運行時,電流閉環(huán)起主要作用,采用的電流斬波控制方式不僅可以抑制電流峰值不超過允許值,還能使電流波形呈較寬的平頂狀,確保電機產(chǎn)生平穩(wěn)的電磁轉(zhuǎn)矩,提高微型電動汽車運行性能;速度閉環(huán)可以達到無靜差的轉(zhuǎn)速調(diào)節(jié),同時為電流閉環(huán)的調(diào)節(jié)提供有效的數(shù)據(jù),從而實現(xiàn)微型電動汽車速度的快響應。
3.2 仿真結(jié)果
電源電壓采用48 V的直流電。若系統(tǒng)給定轉(zhuǎn)速為800 r/min,同時給定負載為12 N·m、開通角為38°、關(guān)斷角為 75°,起始角度為 28°,閾值電流為85 A,滯環(huán)電流為5 A,仿真結(jié)果如圖6所示。
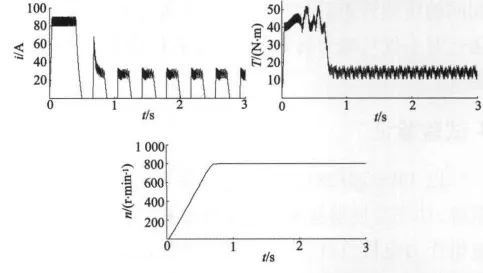
圖 6 θon=38°,θoff=75°仿真波形
由圖6可知,系統(tǒng)在中低速的運行時,起動過程轉(zhuǎn)矩最大值為51.4 N·m,轉(zhuǎn)矩脈動系數(shù)為0.42,且由速度曲線的變化可知,起動過程比較平穩(wěn)且電流斬波起到限幅作用,經(jīng)PI調(diào)節(jié)后,可達到無偏差調(diào)節(jié),響應速度較快,電機運行到穩(wěn)定狀態(tài)時轉(zhuǎn)速能夠到達設定速度800 r/min。
若系統(tǒng)給定額定轉(zhuǎn)速為1 850 r/min、負載為15.5 N·m、閾值電流為85 A、滯環(huán)電流為5 A,當開通角為43°、關(guān)斷角為85°時仿真波形如圖7所示;當選用優(yōu)化的開通角為45°、關(guān)斷角為78°時仿真波形如圖8所示。
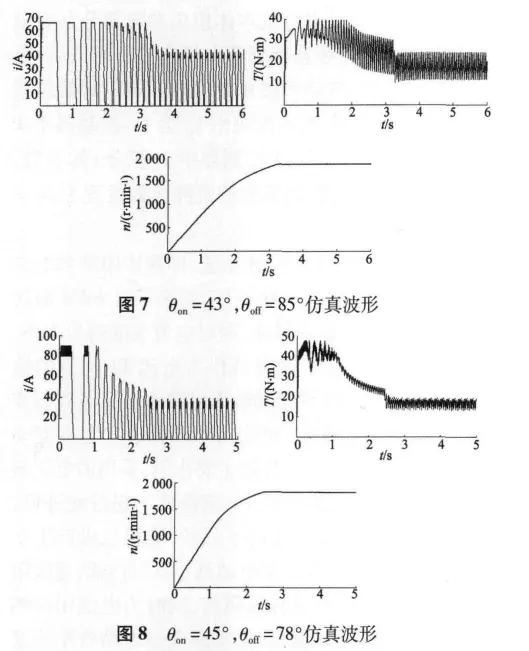
由圖7、圖8知,系統(tǒng)達到設定轉(zhuǎn)速時轉(zhuǎn)矩的脈動系數(shù)分別為0.61和0.23。可見,通過優(yōu)化開通與關(guān)斷角,能達到減小電機的轉(zhuǎn)矩脈動目的,提高電動汽車的動力性能與乘車舒適性。
此外,電機在3.24 s時達到設定轉(zhuǎn)速(圖7),而在2.45 s時達到設定轉(zhuǎn)速(圖8),由此對比分析知:相同的負載轉(zhuǎn)矩下采用優(yōu)化的開通與關(guān)斷角,穩(wěn)態(tài)運行時不僅可減少轉(zhuǎn)矩脈動,還能提高系統(tǒng)的響應速度。
4 試驗驗證
以TMS320F2812 DSP為控制核心組建了試驗系統(tǒng),功率變換器選擇全橋拓撲結(jié)構(gòu),以一臺直流發(fā)電機作為電機負載,依據(jù)前述控制方法,利用自行研制的42 V/5 kW三相6/4結(jié)構(gòu)原理樣機進行試驗。
空載試驗轉(zhuǎn)速范圍為0~1 000 r/min,當開通角為38°、關(guān)斷角為75°,電機設定轉(zhuǎn)速為700 r/min,實測波形如圖9所示。
負載試驗轉(zhuǎn)速范圍 為0~2 000 r/min,當開通角為45°、關(guān)斷角為78°,當電機設定轉(zhuǎn)速為1 100 r/min,實測波形如圖10所示。

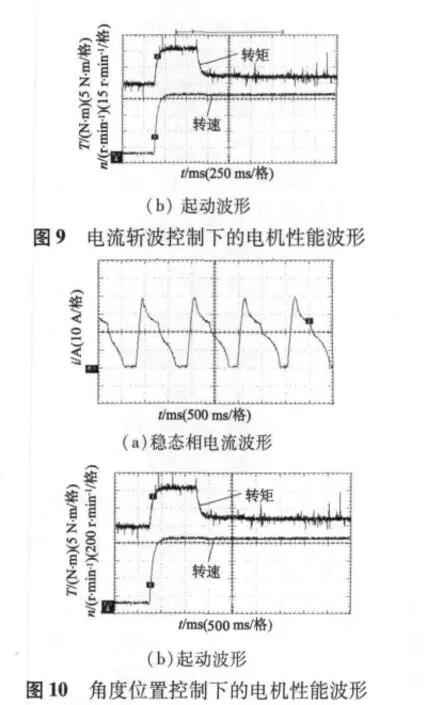
由圖9(a)知,電機在中低速時采用電流斬波控制方式,由圖10(a)高速時采用角度位置控制方式,這兩種控制方式有效結(jié)合,可實現(xiàn)電機在不同工況的穩(wěn)定運行,能滿足電動汽車頻繁起動、加速、爬坡等工況的要求。由圖9(b)、圖10(b)電機由起動到穩(wěn)定運行時間段轉(zhuǎn)矩的變化曲線可知,電機的起動轉(zhuǎn)矩大約為穩(wěn)態(tài)時轉(zhuǎn)矩的2.35倍。
此電機的起動轉(zhuǎn)矩較大;圖中轉(zhuǎn)矩曲線的毛刺是干擾信號所致,穩(wěn)定運行時轉(zhuǎn)矩脈動較小。此外由圖9(b)、圖10(b)可知,當電機在剛起動時加速度較大,隨著磁鏈變化而產(chǎn)生感應電勢的增加,加速度逐漸減小,達到穩(wěn)態(tài)時加速度為零,起動時間短、響應速度快、性能穩(wěn)定;空載起動與負載起動相比,起動速度更快,所需起動時間更少。
5 結(jié) 語
本文通過有限元設計與分析和Simulink動態(tài)仿真相結(jié)合,在低壓大電流的狀態(tài)下,對微型電動汽車用SRM進行了分析,仿真與試驗結(jié)果證明了所設計電機具有良好的調(diào)速性能,電機運行穩(wěn)定,具有較強的爬坡能力。能滿足微型電動汽車各種工況的要求,為SRM在微型電動汽車的應用提供了較強潛在的理論和實踐價值。
[1]周強,劉闖.基于ASIC的高速開關(guān)磁阻電機數(shù)字控制器[J].電工技術(shù)學報,2009,24(3):55 -60.
[2]Wang H,Wang Y,Liu X,et al.Design of novel bearing lessswitched reluctance motor[J].IET Electric Power Applications,2011,6(2):73 -81.
[3]Xue X D,Cheng K W E.Multi- objective optimization design of in - wheel switched reluctance motors in electric vehicles[J].IEEE Transactions on Industrial Electronics,2010,57(9):2980 -2987.
[4]Chen Hao,Wang Xing,Zeng Hui.Electromagnetic design of switched reluctance linear machine[C]//Proceedings of 6th International Power Electronics and Motion Control Conference.2009(5):836 -840.
[5]Torkaman H,Afjei E,Toulabi M S.New double- layer- perphase isolated switched reluctance motor:concept,numerical analysis and experimental confirmation[J].IEEE Transactions on Industrial Electronics,2012,59(2):830 -838.
[6]代穎,崔淑梅.車用電機的有限元模態(tài)分析[J].中國電機工程學報,2011,31(9):100 -104.
[7]項倩雯,孫玉坤.磁懸浮開關(guān)磁阻電機建模與參數(shù)優(yōu)化設計[J].電機與控制學報,2011,15(4):74 -79.
[8]朱曰瑩,王大方.電動車用開關(guān)磁阻電機轉(zhuǎn)矩控制器設計與優(yōu)化[J].電機與控制學報,2010,14(2):47 -52.
[9]潘再平,羅星寶.基于迭代學習控制的開關(guān)磁阻電機轉(zhuǎn)矩脈動抑制[J].電工技術(shù)學報,2010,25(7):51 -55.
[10]Jaehyuck Kim,Keunsoo Ha,Krishnan R.Single-controllableswitch - based switched reluctance motor driver for low cost,variable - speed applications[J].IEEE Transactions on power Electionics,2012,27(1):379-387.
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45