永磁無刷直流電動機的自學習模糊PI控制
2013-06-19 09:09:10雷金莉竇滿峰
微特電機 2013年3期
關鍵詞:規則
雷金莉,竇滿峰
(西北工業大學,陜西西安710072)
0 引 言
永磁無刷直流電動機結構簡單、體積小、運行可靠、維護方便、調速性能好,永磁無刷直流電動機沒有勵磁損耗、效率高、功率密度高,在航空、航天領域的電動力系統中得到了廣泛的應用。航空航天用電動力系統運行環境特殊,空氣密度、溫度、壓強等大氣參數的變化會引起驅動電機參數以及負載特性的變化,因此,航空航天用驅動電機系統呈現出明顯的強耦合性、參數不確定性及惡劣飛行環境下干擾未知等非線性特性[1,2]。
通常直流電機調速系統采用常規PID控制。常規PID控制算法簡單、控制精度高、穩定性好、易于實現,但對于非線性、參數不確定性被控對象,PID控制參數整定非常困難,難以取得理想的控制效果。隨著現代控制理論和智能控制理論的不斷發展,將智能控制、現代控制以及常規的PID控制等多種控制方法相融合,發揮各自優點,實現高度組合智能控制成為當前的發展趨勢和研究熱點[3-8]。
本文將自學習模糊控制與PI控制相結合構成自學習模糊PI控制系統,既具有模糊控制魯棒性強、動態響應好、不需要被控對象數學模型等特點,又發揮了PI控制器的控制精度高、穩定性好的特性,對復雜的非線性系統能進行簡單而有效的控制,正適合解決航空航天用驅動電機系統強非線性、強耦合性、準確模型難以建立及未知擾動的控制問題。
1 永磁無刷直流電動機控制系統設計
航空航天用永磁無刷直流電動機工作環境復雜,控制精度和穩定性要求高,而外界大氣參數的變化時,電機的定子電阻、轉動慣量及負載轉矩也隨之發生變化,且外界環境的變化是不可預知的。由于電機參數變化的不確定性,難以建立精確的數學模型,常規的PID控制不能滿足系統的控制需求。而自學習模糊控制不需被控對象的數學模型,魯棒性強,對強非線性和滯后的過程或對象有較好的控制效果,但單純的自學習模糊控制穩態品質較差,因此本文將自學習模糊控制與PI控制相融合,揚長避短。自學習模糊PI控制算法既具有自學習模糊控制算法不需要準確數學模型、魯棒性強、控制參數可及時自動調整、動態品質好等優點,同時又具有PI控制穩態精度高、穩定性好等特點,非常適合航空航天驅動電機非線性系統控制[9-11]。
本文設計的永磁無刷直流電動機控制采用轉速、電流雙閉環串級控制,電流環采用限幅和PI控制算法,速度環采用自學習模糊PI控制算法,控制系統結構框圖如圖1所示。
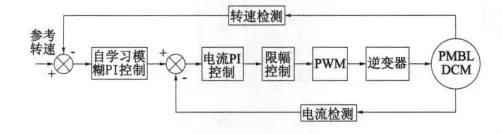
圖1 永磁無刷直流電動機控制系統結構框圖
2 自學習模糊PI控制器設計
2.1 結構設計及工作原理
自學習模糊PI控制器包括自學習模塊、模糊控制模塊及PI控制模塊三個部分。控制器的輸入是轉速誤差e和轉速誤差變化率ec,控制輸入為轉速控制量,其結構框圖如圖2所示。
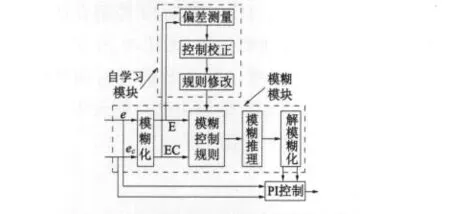
圖2 自學習模糊PI控制器結構框圖
自學習模塊由偏差測量、控制校正和規則修改三部分組成,其中偏差測量是測量期望輸出與實際輸出之差,確定輸出響應需要的校正量;控制校正是將需校正的輸出響應量轉變為需校正的控制量;規則修改是通過修改模糊控制規則來實現校正量。模糊控制模塊包含了模糊化、模糊控制規則建立、解模糊化三個過程,其輸入是轉速誤差e和轉速誤差變化率ec,輸出為PI控制器的調節參數 kp、ki。當有外界干擾或驅動電機參數變化時引起輸出量偏離設定值時,自學習模塊通過對反應輸出量大小的誤差信號的測量,獲得需要校正的輸出響應量,將其轉換成需校正的控制量。根據控制量修改模糊控制規則,從而調整PI控制的調節參數,達到調整轉速輸出控制量,以抵制外界干擾或對象參數變化對系統的影響。
2.2 輸入、輸出量模糊化
自學習模糊PI控制器輸入變量為轉速誤差e和轉速誤差變化率ec,用模糊控制規則在線修改PI控制器參數,自學習模糊控制器的輸出量為比例參數kp和積分參數ki。e和ec定義:


式中:n(k)為k時刻的轉速,T為采樣時間。
e和ec的論域量化為13個等級:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6},輸出變量kp、ki的論域量化為15個等級:{-7,-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6,+7}。輸入變量和輸出變量的模糊集均選用7個詞匯來表示:{NB,NM,NS,ZE,PS,PM,PB},結合無刷直流電動機的調速特性,各輸入、輸出變量的隸屬度函數采用三角形隸屬函數。
2.3 控制規則確定及自學習算法設計
2.3.1 模糊控制規則生成
模糊控制規則是專家的經驗和操作者的技能加以總結而得出的模糊條件語句的集合,此集合能夠保證控制器輸出能使系統的動靜態特性最佳。kp、ki調整規則應遵循:誤差很大時,為使系統響應快,防止出現積分飽和現象,kp應較大、ki應很小;誤差適中時,為了避免對系統動態性能影響,kp應取得小些,ki的取值適當;誤差很小時,應增大積分作用,以減小穩態誤差,即ki應很大。
根據上述調整原則,并結合以往的電機控制經驗,可得到kp、ki模糊控制規則如表1、表2所示。
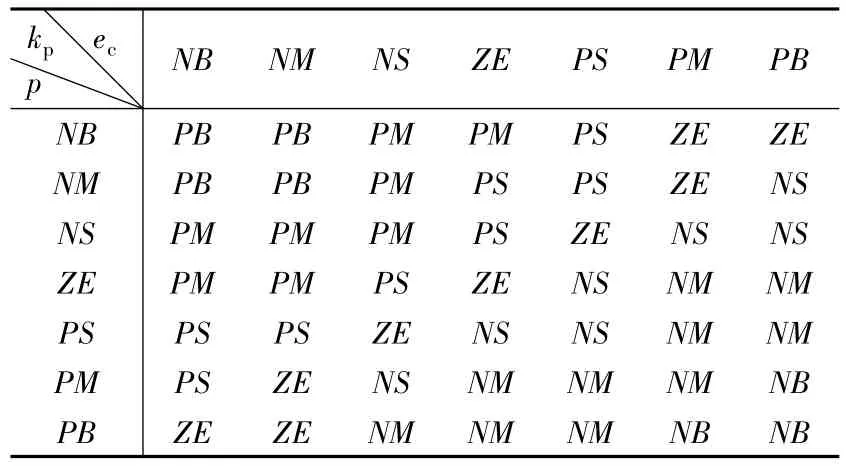
表1 kp模糊控制規則表
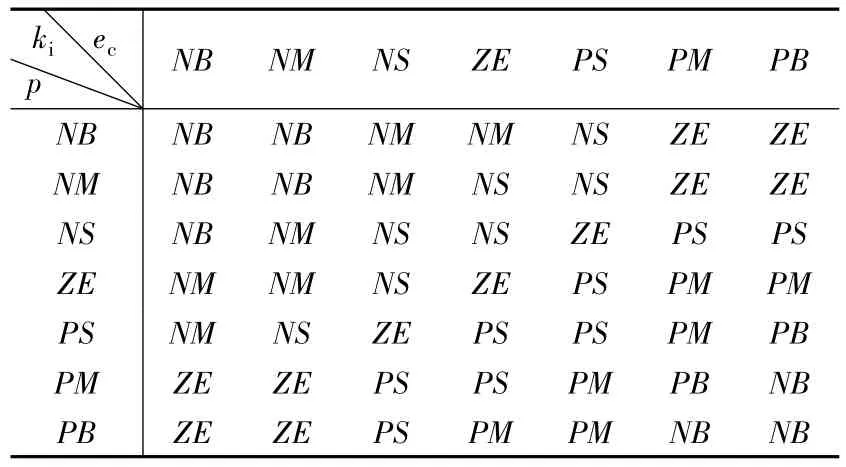
表2 ki模糊控制規則表
2.3.2 自學習算法設計
模糊控制規則的設計是實現系統良好控制品質的關鍵,而永磁無刷直流電動機參數具有不確定性、耦合性等特性,這些都會造成由模糊控制規則所得的控制效果不能令人滿意。自學習算法根據期望輸出值與實際輸出值的偏差在線自動修改模糊控制規則,從而使系統輸出快速穩定于期望值。
自學習算法的輸入變量取轉速誤差e和轉速誤差變化率ec,輸出量即為控制規則的校正量Δ,設:

式中:λ1、λ2分別反映模糊控制規則修改中實際輸出接近期望輸出的程度和速度,一般可取1>λ2>λ1>0。
在任一時刻,模糊器的輸出是e和ec觸發的m條規則共同作用的結果。當外界有擾動或系統參數變化時,自學習模塊測量e和ec,計算得出校正量Δ,根據λ1和λ2的大小分配校正量Δ對各條控制規則的修改量,若原控制規則:

考慮校正量之后,模糊控制規則改為:

2.4 模糊推理
本文模糊推理采用Mamdani模糊合成推理法,解模糊采用均值判決法。由輸入速度誤差e和誤差變化率ec,參照上述模糊規則表得到PI控制器參數的修正值,并代入下式對PI控制器參數進行實時修正。
式中:kp0、ki0為初始PI控制參數。
3 仿真實驗
本文以MATLAB/Simulink為仿真環境,采用模糊邏輯工具箱和電氣系統工具箱中的相應模塊,進行了永磁無刷直流電動機控制系統的仿真實驗。實驗用永磁無刷直流電動機參數:額定電壓500 V,電樞相電阻2.85 Ω,定子繞組的電感8.5 mH,電機轉動慣量0.000 8 kg·m2,極對數 p 為 4。
圖3為采用常規PI控制算法和自學習模糊PI控制算法的轉速響應曲線。對比仿真結果可以得出:采用自學習模糊控制PI方法的電機系統響應時間約為40 ms,無超調;在PI控制算法下系統超調約為6.7%,響應時間為60 ms。
圖4為在0.1 s突加負載情況下,采用常規PI控制算法和自學習模糊PI控制算法的轉速響應曲線。從仿真結果可知:在自學習模糊PI控制算法下,系統超調約為5%,響應時間約為30 ms;而PI控制方法下系統超調約為6%,響應時間約為35 ms。
圖5、圖6分別為電機轉動慣量由0.000 8 kg·m2變為0.001 2 kg·m2時,采用常規 PI控制算法和自學習模糊PI控制算法的轉速響應曲線。比較仿真曲線可以得出:當電機轉動慣量增大時,采用自學習模糊控制PI算法的系統無超調,響應時間由40 ms增至55 ms;PI控制算法下,系統的超調量從6.7%上升至10%,響應時間從60 ms增至90 ms。
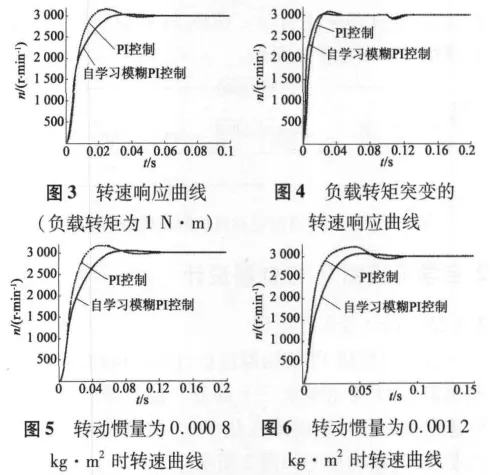
綜上所述,采用自學習模糊PI控制算法的永磁無刷直流電動機系統響應快、無超調,在負載和電機參數發生變化時,系統的超調及響應時間變化不明顯,魯棒性強,可以較好地解決航空航天用驅動電機的非線性、不確定性控制問題。
4 結 語
本文針對航空航天用永磁無刷直流電動機的強非線性、不確定性特性,設計了自學習模糊PI控制算法,并在MATLAB/Simulink環境下建立了永磁無刷直流電動機電流、轉速雙閉環控制系統仿真模型,結合實例電機進行設計算法驗證實驗。仿真實驗結果表明:采用自學習模糊PI控制算法的永磁無刷直流電動機系統穩態無誤差、動態響應速度快、無超調,當電機負載擾動和電機內部參數變化時,系統具有自適應控制能力,響應時間和超調變化較小,魯棒性強,解決了航空航天用永磁無刷直流電動機強非線性、強耦合性及不確定性等實際控制問題,具有一定的理論意義和應用價值。
[1]Schmidt D K.Dynamic modeling of control and station - keeping guidance of a large high altitude near space air- ship[R].AIAA Guidance,Navigation,and Control Conference and Exhibit,2006,6781:1-14.
[2]羅玲,劉衛國,竇滿峰,等.高空飛艇螺旋槳驅動電機分析[J].宇航學報,2009,30(6):2140-2144.
[3]Bristrol E H.On a new measure of interaction for multivariable process control[J].IEEE Trans.Autom Control,1966(1):133 -134.
[4]紀志成,李曉慶,沈艷霞.無刷直流電機的模型參考模糊自適應方法及實驗研究[J].電工技術學報,2006,21(1):75 -81.
[5]Ge M,Chiu M,Wang Q.Robust PID controller design via LMI approach[J].Journal of Process Control,2002(12):3 - 13.
[6]紀志成,沈艷霞,薛花.無刷直流電機自適應模糊控制的研究[J].中國電機工程學報,2005,25(5):104 -109.
[7]李紅偉,諶貴輝,尚澤明.無刷直流電機的變論域模糊自適應PID控制系統設計[J].江南大學學報(自然科學版),2009,8(1):49-53.
[8]支長義,王瑞玲,唐道奎,等.無刷直流電動機模糊自適應PID控制策略研究[J].電力系統保護與控制,2010,38(8):35-37.
[9]李宏,王崇武.永磁無刷直流電機模糊自適應控制器設計[J].計算機仿真,2011,28(2):209 -212.
[10]劉興艷,上官璇峰,董洋洋,等.基于P-模糊自適應PID控制的無刷直流電動機調速系統[J].工況自動化,2010(7):45-49.
[11]徐湘元.自適應控制理論與應用[M].北京:電子工業出版社,2007.
猜你喜歡
作文周刊·小學一年級版(2022年28期)2022-05-30 10:48:04
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
法律方法(2019年3期)2019-09-11 06:26:16
中國外匯(2019年7期)2019-07-13 05:44:52
幸福(2018年33期)2018-12-05 05:22:42
環球飛行(2018年7期)2018-06-27 07:26:14
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
運動(2016年6期)2016-12-01 06:33:42