永磁同步電動機新型滑模觀測器無傳感器控制
2013-06-19 09:09:12陳長龍
微特電機 2013年3期
關鍵詞:系統
陳長龍,樊 貝,胡 堃
(中國礦業大學,江蘇徐州221008)
0 引 言
在永磁同步電動機驅動控制中,首先需要知道電機的轉子位置信息,傳統的方法是在電機轉軸上安裝機械傳感器(霍爾位置傳感器、旋轉編碼器等)來獲得永磁電機的位置和速度信息。一些高精度控制系統,對傳感器的精度要求很高,同時由于機械式傳感器會增加電動機轉軸的轉動慣量,加大了電動機的尺寸和體積,這樣一方面增加外圍線路的連接,使系統易受干擾和不穩定,另一方面也增加了成本。在一些特殊應用場合受工作環境的影響,系統的可靠性也會大大降低,這就使得去掉這些機械式傳感器,而利用電機自身的電氣特性和數學模型估算出電機的轉子位置的無傳感器控制技術的研究成為當前研究的熱點。基于無位置傳感器技術控制的永磁同步電動機調速系統利用電壓、電流傳感器檢測的電機的定子電壓和電流以及根據電機的數學模型來估算出電機的轉子位置和轉速。這樣大大簡化了系統結構,降低了系統控制成本,后期維護也很方便,滿足一些特殊場合的使用要求。由于在永磁同步電動機矢量控制系統中,直軸和交軸電流是通過坐標變換獲得,坐標變換需要知道轉子位置角,若獲取的轉子位置角精度不高,將會降低整個控制系統的性能,電機的穩定運行也會受到很大影響[1-4]。
變結構控制是一種控制系統的設計方法,適用于線性及非線性系統。它具有一些優良特性,尤其是對加給系統的攝動和干擾有良好的自適應性。主要策略為在動態控制過程中根據當前系統狀態選擇合適的不同的“結構”,使系統按預定“滑動模態”狀態軌跡而運動,故該策略又被稱之為滑模變結構控制[5]。永磁同步電動機的動態數學模型是一個高階、非線性、強耦合的多變量系統,而滑模變結構控制與控制對象的參數變化和系統的外界擾動無關,因此將其應用于永磁同步電動機控制系統中能大大降低這些影響。高頻開關的切換和儲能器件的電流電壓慣性效應以及實際控制中不存在理想開關,這些均會造成系統出現抖振現象,影響控制系統的精度,增加能耗,抖振嚴重時會造成系統振蕩以致崩潰[6],必須予以減弱。本文采用滑模觀測器的理論,根據電機的數學模型結合永磁同步電動機矢量控制方案分析了新型滑模觀測器的永磁同步電機無位置傳感器矢量控制調速系統的理論算法。仿真和實驗表明該系統克服了傳統滑模觀測器控制系統中存在的抖振問題,較好地實現了永磁同步電動機的位置和速度估計。
1 新型滑模觀測器的設計
1.1 理論算法
滑模觀測器以系統可測量的定子電壓和電流作為輸入,同時對電機的反電勢進行估計。根據電機理論可知,轉子位置角信息包含在電機的反電勢中,從而可通過反電勢獲得轉子位置角,同時對電機轉速進行估計,這樣便可實現電機無速度傳感器控制。
永磁同步電動機在兩相靜止α-β坐標系下的電壓方程:
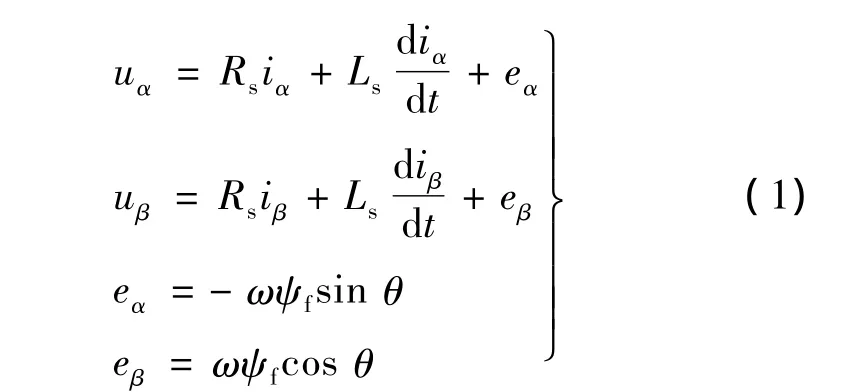
式中:eα、eβ分別為α和β軸的反電動勢。將上式改寫成狀態方程形式如下:

式中:iα、iβ為α軸和β軸電流;Rs為永磁同步電動機定子相電阻;Ls為永磁同步電動機相電感;ψf為永磁同步電動機反電動勢系數;ω為永磁同步電動機轉子角速度。
其中電機轉速變化的機械調整時間遠大于定子電流變化的電氣調整時間,因此在這里轉速的變化可以忽略不計,即≈0;這樣可將反電動勢模型寫成下式:
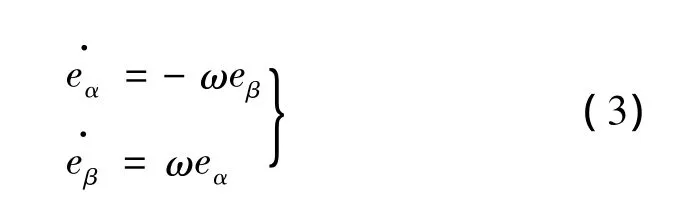
由式(3)可知,永磁同步電動機的反電動勢中包含有轉子位置與轉速的信息,反電動勢的幅值與轉子轉速成正比,其波形為一正弦波[7-8]。在實際控制的系統中,由于高頻開關的切換、系統慣性環節以及系統延遲等因素導致出現了抖振,為了消弱這一現象,本文設計一個基于飽和函數的新型滑模觀測器:
根據滑模變結構控制理論,這里采用飽和函數sat(s)替代傳統滑模變結構中的常值切換符號函數sgn(s),以達到削弱抖振的目的,飽和函數曲線如圖1所示。圖中Δ為邊界層;

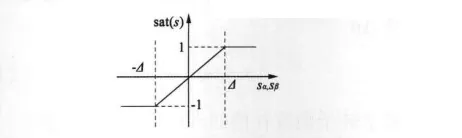
圖1 飽和函數曲線
由圖1曲線可知,它是一種存在3個結構的變結構系統:飽和函數有2個切換面(s=Δ和 s=-Δ),在切換面之間s為線性函數且在s=0上為連續函數。可定義為下面的式子[9]:
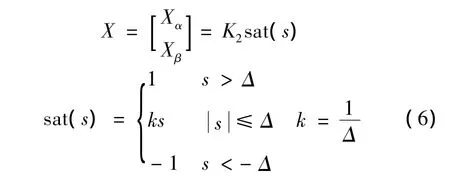
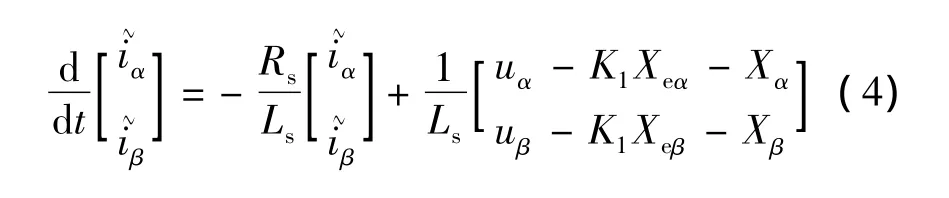
式中:K2為滑模系數,且K2為大于零的系數;X為電流誤差開關信號,其中包含的高頻信號具有不連續性,為了降低高頻信號的影響,在此本文對控制函數采用自適應數字低通濾波器進行濾波從而得到等價控制函數 Xeα、Xeβ,Xeα、Xeβ定義如下:
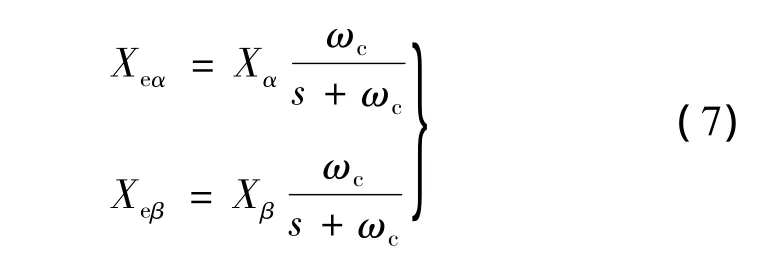
式中:ωc為低通濾波器的截止頻率。結合式(2)和式(4)可得新型滑模觀測器的動態方程,定義如下:

根據滑模變結構控制理論,當系統運動點在滑模面上進行滑模運動時,有:
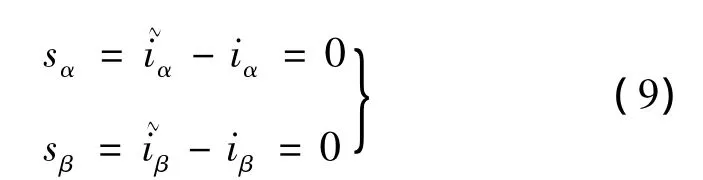
將式(9)代入式(8)得:
這樣由上式估算的反電動勢值結合式(1)可用下式出計算轉子位置角度:

由于傳統滑模觀測器在估算反電動勢的過程中引入了低通濾波器,低通濾波器的引入必然會導致估算出的轉子位置的相位滯后,并且隨著電機轉速的上升滯后的相角會加大。因此在新型滑模觀測器中采取了對估算的轉子位置角進行一個相位補償來解決該問題[10]。根據相位響應添加了一個相位延遲表,這樣就可以通過查表求得運行時所需要的的相移角Δθ:

基于轉子角度補償的滑模估算轉子位置:

式中:ωc為低通濾波器的截止頻率。
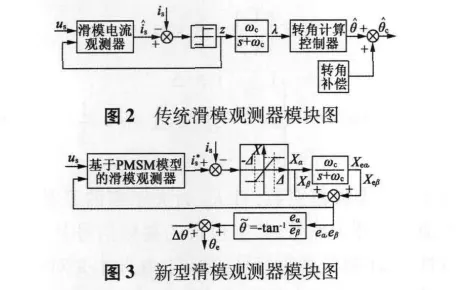
圖2和圖3分別給出傳統滑模觀測器與新型滑模觀測器的模塊圖。
2 轉子速度估計
計算轉速的方法通常是對估算轉子位置求微分:

該方法存在計算精度不高的問題,如果滑模觀測器估算的轉子位置角出現了較小偏差,通過微分計算就會導致轉速估計值存在較大偏差。針對此問題,可以采用低通濾波器對其進行低通濾波來解決,但是低通濾波器對降低估算轉速誤差的效果不但達不到要求,而且還會引起引入幅值的衰減和相位的滯后,估算效果并不是很好[11]。本文在此介紹一種采用鎖相環(PLL)的方法來計算轉速的策略。其原理是將補償后的角度估計值通過鎖相環后得到速度估計值。設計的PMSM鎖相環轉速估算原理框圖如圖4所示。
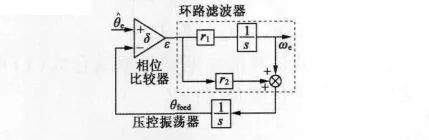
圖4 基于鎖相環的轉速估算
將估算的轉子位置角與反饋位置角進行相位比較后獲得誤差信號ε。定義誤差信號ε如下:

由誤差信號ε可定義預測方程:
3 仿真分析
本文利用MATLAB/Simulink設計的仿真框圖對本文所提出的基于新型滑模觀測器的永磁同步電動機無傳感器矢量控制策略的可行性和有效性進行仿真試驗,仿真框圖如圖5所示。電機控制系統采用矢量控制方法,其中id=0的策略,速度環和電流環均采用PI控制,觀測器分別采用傳統滑模觀測器和新型滑模觀測器,最后對兩種觀測器所得到的仿真結果進行了比較分析。
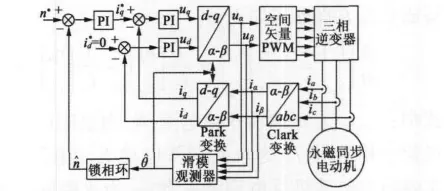
圖5 永磁同步電動機無傳感器控制仿真框圖
圖6 、圖7分別為給定轉速為50 rad/s時兩種觀測器的仿真波形。由圖6(a)、圖6(b)和圖7(a)、圖7(b)比較可以看出,采用新型滑模觀測器得到的估算電流可以很好地跟蹤實際電流iα,同時估算電流峰值的抖振現象也得到明顯削弱,由此可見采用近似飽和函數法替代傳統開關函數的新型滑模觀測器能夠消弱固有的抖振現象。由圖6(c)和圖7
(c)比較可得,改用近似飽和函數法后滑模觀測器估算的反電勢和的波形也得到比較大的改觀。圖6(d)和圖7(d)為估算轉子位置角θe跟蹤實際轉子位置角θ的波形圖,從圖中可見,采用相位補償后轉子轉角的估算誤差明顯降低。從圖6(e)和圖7(e)可見,將轉速的估算方法改為鎖相環法之后,所估算的轉速能較好地跟蹤了給定轉速的變化。
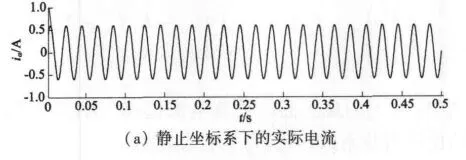
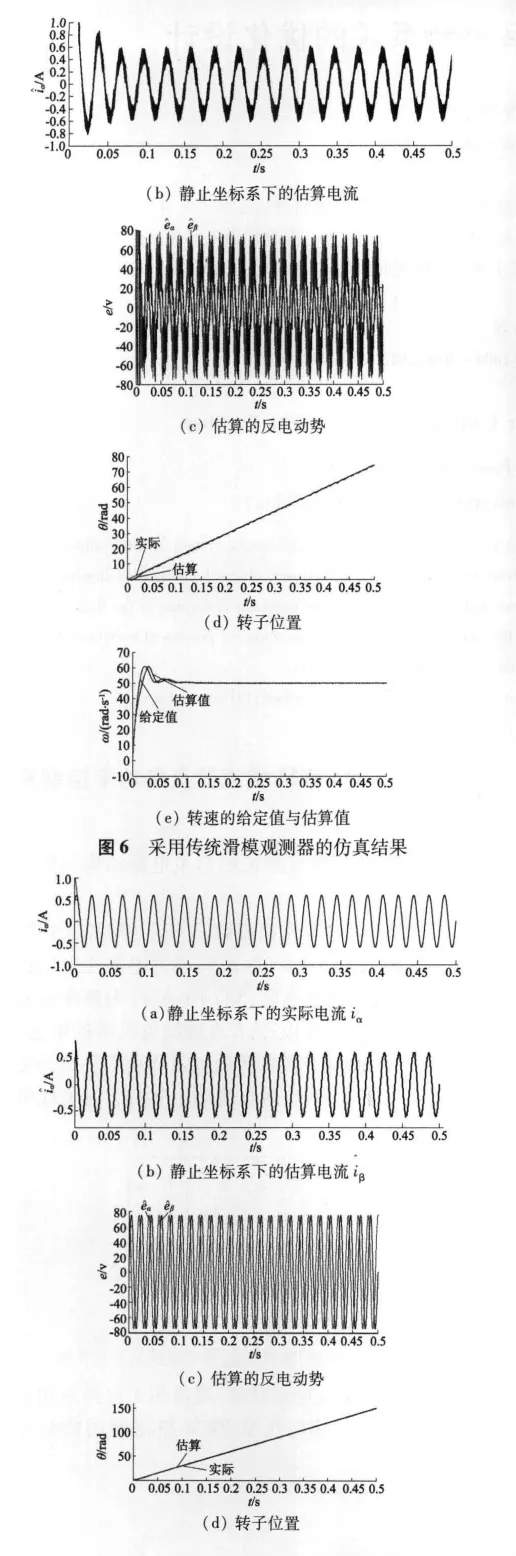
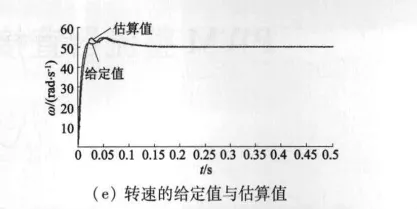
圖7 采用新型滑模觀測器的仿真結果
4 結 語
本文在分析了傳統滑模觀測器的基礎上,把飽和函數引進滑模觀測器,并采用了鎖相環法計算轉速的策略,設計了一種新型滑模觀測器同時搭建了基于該觀測器的永磁同步電動機無位置傳感器控制的仿真模型。仿真結果表明:設計的新型滑模觀測器對傳統滑模觀測器控制系統中存在的抖振問題具有明顯的消弱,估算轉速能較好地跟蹤給定轉速,實現了對轉子位置和轉速的高精度估計;驗證了基于該方法的PMSM無位置傳感器矢量控制策略是可行的、有效的。
[1]Dhaouadi R,Mohan N,Norum L.Design and implementation of an extended Kalman filter for the state estimation of a permanent magnet synchronous motor[J].IEEE Transactions on Power Electronics,1991,6(3):491 -497.
[2]丁煒,狄可可,齊冬蓮,等.基于SMO的PMSM無位置傳感器算法研究[J].電測與儀表,2009,46(8):8 -12.
[3]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997.
[4]朱喜華,李穎暉,張敬.基于一種新型滑模觀測器的永磁同步電機無傳感器控制[J].電力系統保護與控制,2010,38(13):6-10.
[5]王豐堯.滑模變結構控制[M].北京:機械工業出版社,1998.
[6]郭清風.永磁同步電機磁極位置檢測技術的研究[D].哈爾濱:哈爾濱工業大學,2007.
[7]魯文其,胡育文,黃文新,等.無刷直流電機無位置傳感器轉子位置自檢測復合方法[J].電工技術學報,2008,23(9):71-75.
[8]儲劍波.驅動空調壓縮機的永磁同步電動機的控制技術研究控制[D].南京:南京航天航空大學,2010.
[9]孫杰,崔巍,范洪偉,等.基于滑模觀測器的永磁同步電機無傳感器矢量控制[J].電機與控制應用,2011,38(1):38 -41.
[10]王寅東.基于新型滑模觀測器的永磁同步電機無位置傳感器控制[D].天津:天津大學,2011.
[11]魯文其,胡育文,杜栩楊,等.永磁同步電機新型滑模觀測器無傳感器矢量控制調速系統[J].中國電機工程學報,2010,30(33):78-83.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32