超球體平方根平淡卡爾曼濾波及其應用
2012-12-01 02:11:42王躍鋼雷堰龍陳蘇邑
探測與控制學報 2012年5期
王躍鋼,蔚 躍,雷堰龍,陳蘇邑
(解放軍第二炮兵工程大學自動化系,陜西 西安 710025)
0 引言
初始對準對于慣導系統(tǒng)的精度與啟動準備時間有著直接的關系,所以一直被看作慣性導航技術領域的重要問題之一[1]。捷聯(lián)慣導系統(tǒng)(strap-down inertial navigation system,SINS)初始對準的實質就是確定載體坐標系到真實導航坐標系的轉換矩陣。由于初始對準誤差將嚴重影響系統(tǒng)的整體誤差,因此要求初始對準的對準精度要高,對準時間要短。采用卡爾曼濾波是實現(xiàn)慣導系統(tǒng)自對準的有效途徑之一,但卡爾曼濾波使用的條件是只能用于線性系統(tǒng),對于非線性系統(tǒng)常用的方法是采用擴展卡爾曼濾波(extended kalman filter,EKF),而在大方位失準角情況下,這種近似線性化的方法舍棄了非線性函數(shù)的高階項,引入了誤差,使濾波結果為次優(yōu),甚至導致濾波發(fā)散[2]。Julier[3]等人從非線性均值和方差傳播的角度提出平淡卡爾曼濾波(unscented kalman filter,UKF),這種方法直接利用非線性模型進行遞推估計,避免了線性化誤差的引入且遞推估計過程不需計算矩陣,但隨著狀態(tài)空間維數(shù)的增加,計算量也會急劇增大,加重系統(tǒng)計算負擔,同時無法保證在濾波更新階段生成的狀態(tài)協(xié)方差陣非負定[4],從而直接影響采樣點生成時進行的Cholesky分解。為此,本文提出超球體平方根平淡卡爾曼濾波方法,解決上述問題。
文章第一、二章為基礎鋪墊,第三章將超球體采樣及平方根濾波結合提出一種新的濾波方法,并應用到捷聯(lián)慣導系統(tǒng)大失準角下的非線性誤差模型中,第四章通過matlab數(shù)值仿真,分別與EKF和UKF進行了對比,說明了新方法的可行性。
1 捷聯(lián)慣導系統(tǒng)非線性誤差方程
1.1 速度誤差方程
式中,W為量測噪聲,B為噪聲驅動陣。
大失準角下的速度誤差方程為[5]:

令歐拉失準角φx,φy,φz的轉動順序為φz、φx、φy。則可求得C由式(2)確定:

1.2 姿態(tài)誤差方程
大失準角下姿態(tài)誤差方程為[5]:

1.3 非線性對準濾波模型
假設陀螺和加速度計誤差僅由常值漂移εb=[εbxεbyεbz]T,▽b= [▽bx▽by▽bz]T和觀測噪聲εg= [εgxεgyεgz]T,▽r= [▽rx▽ry▽rz]T組成,忽略其他因素的影響,可以表示為:

選取狀態(tài)變量為:

式(1)、式(3)、式(5)組成了大失準角下SINS誤差狀態(tài)方程。

取速度誤差為觀測量得到SINS觀測方程為:

式(8)中,ζ為觀測噪聲。
式(6)、式(8)構成了非線性對準的濾波模型。
2 超球體采樣及平方根濾波
2.1 超球體分布采樣點變換方法
Julier等人[3]從非線性均值和方差傳播的角度提出UKF,這種方法直接利用非線性模型進行遞推估計,避免了線性化誤差的引入,且遞推估計過程不需計算矩陣,比EKF更為簡單,后來又提出了超球體分 布 采 樣 點 變 換 (spherical simplex unscented transformation,SSUT)方法[6],減少采樣點的求取,將采樣點數(shù)目由2n+1減小到n+2,當系統(tǒng)維數(shù)很大時可以極大地降低計算量[7]。同時SSUT中采樣點具有與狀態(tài)相同的前二階矩。SSUT采樣點的選取步驟如下:
1)選擇第0個權值W0,并且0≤W0≤1
2)計算其他權值

3)初始化一維化狀態(tài)序列

4)空間維數(shù)j=2,3,…,n時,遞推公式為:

2.2 平方根平淡卡爾曼濾波算法
由于在標準UKF濾波狀態(tài)更新階段,P陣很容易失去正定性[8]。造成協(xié)方差陣P 無法進行Cholesky分解,不能生成采樣點。采用平方根平淡卡爾曼濾波解決此問題,該方法在UKF濾波的時間更新和量測更新階段采用平方根濾波將狀態(tài)估計誤差協(xié)方差陣的Cholesky因子形式Sa直接傳遞,避免了在采樣點計算時對狀態(tài)估計誤差協(xié)方差陣的Cholesky分解,從而解決了UKF數(shù)值不穩(wěn)定性的問題,減小了計算量。
3 超球體平方根平淡卡爾曼濾波算法
改進的平淡卡爾曼濾波算法是SSUT方法與平方根UKF結合的方法,這里稱之為超球體平方根平淡卡爾曼濾波算法,取超球體采樣的首字母以及平方根的第二個字母,該算法英文縮寫為SRUKF(spherical root unscented kalman filter)。
不妨設非線性系統(tǒng)的模型如式(13):

式中,過程噪聲wk是均值為0,方差為Q的高斯白噪聲。同樣,量測噪聲vk為均值為0,方差為R的高斯白噪聲。
1)初始化

2)計算采樣點

3)時間更新
4)量測更新
4 仿真分析
仿真初值按照如下選取:東向、北向、天向失準角分別取2°,2°,15°;陀螺常值漂移取0.02 (°)/h,隨 機 漂 移 為 0.01 (°)/h;加 速 度 計 常 值 漂 移 為1×10-4g,緯度取45°,當?shù)馗叨?50m,仿真時間400s,SINS采樣周期取0.05s。
按照以上仿真條件分別進行EKF,SRUKF,UKF濾波,仿真結果如表1和圖1—圖3所示。
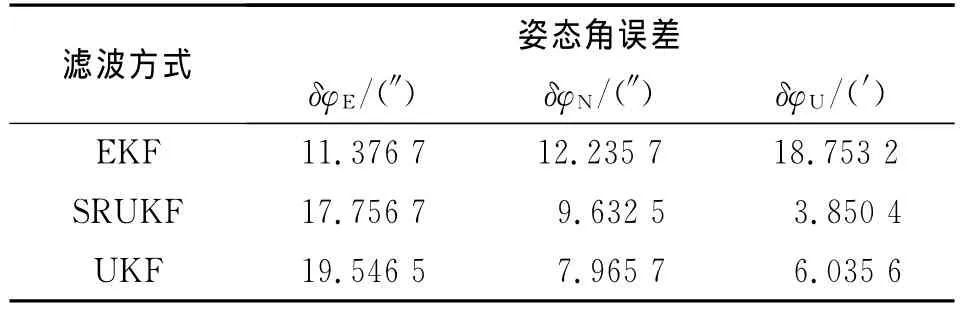
表1 捷聯(lián)慣導系統(tǒng)的初始對準穩(wěn)態(tài)均值Tab.1 Steady state mean of SINS initial alignment
其中,表1穩(wěn)態(tài)均值是250~350s仿真結果取絕對值后的均值。這段時間內(nèi),濾波進入穩(wěn)態(tài)沒有了符號的變化,為了比較穩(wěn)態(tài)值偏移0的距離,因此都取絕對值,100s時間段內(nèi)求均值的目的是為了有效地克服單個奇異點帶來的影響,不會對仿真結果造成影響。
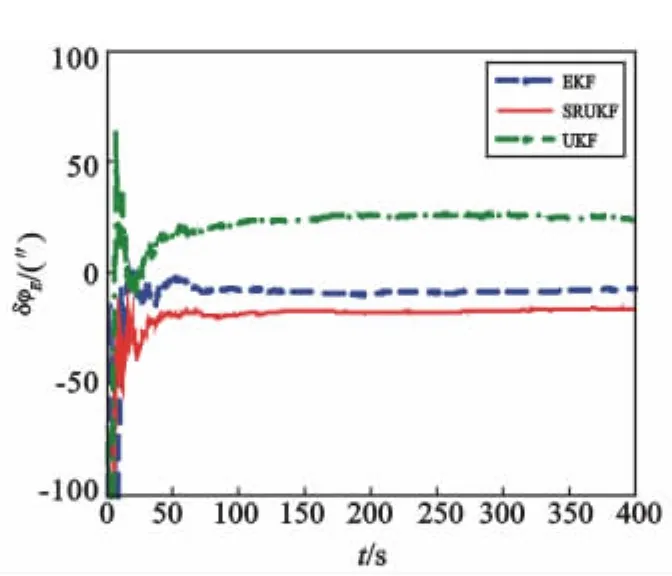
圖1 東向誤差角估計值Fig.1 Error estimation of east angle
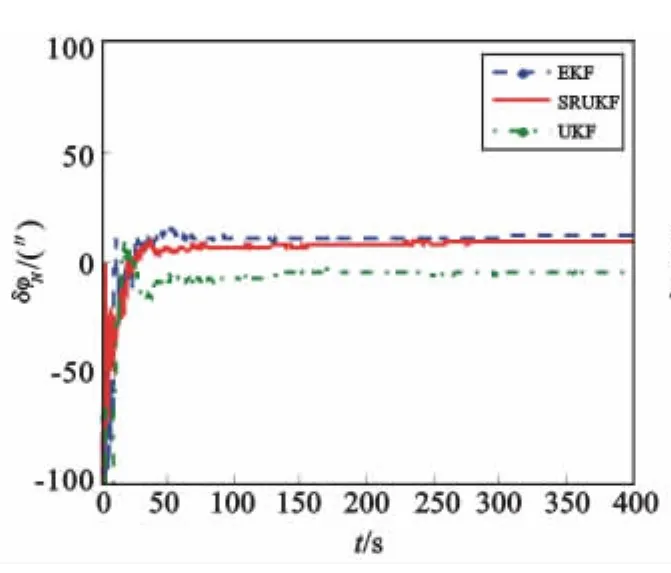
圖2 北向誤差角估計值Fig.2 Error estimation of north angle
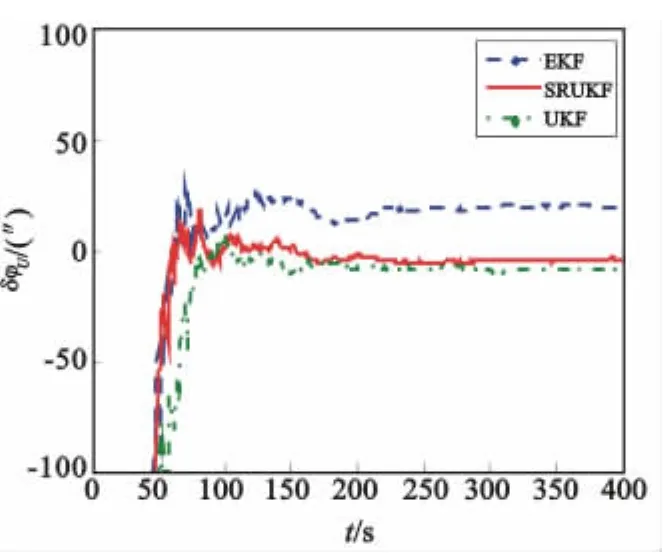
圖3 天向誤差角估計值Fig.3 Error estimation of attitude angld
捷聯(lián)慣導系統(tǒng)在該初始條件下水平(東向與北向)誤差角的理論穩(wěn)態(tài)誤差值為18.73″,天向理論穩(wěn)態(tài)誤差值為4.46′。仿真結果表明:水平誤差角仿真結果與理論分析的效果相符,三種濾波方法水平失準角誤差很小,收斂時間也很快,這是因為水平失準角是小角度。其次,對于初始對準的核心部分方位角的對準精度而言,表1指出SRUKF與UKF的濾波結果相對于EKF來講與理論值更為接近,這從圖3也可以直接看出,這是因為SRUKF和UKF在處理非線性系統(tǒng)的精度能達到二階,而EKF在處理非線性問題上是按照泰勒級數(shù)展開取一階的線性化方法,其精度只能達到一階,要想達到更高精度就必須得求復雜的雅克比矩陣。因此,雅克比矩陣的求取是限制EKF精度的主要因素。最后,圖3中SRUKF的收斂時間要比UKF快,原因是采樣點數(shù)目由2n+1減小到n+2,系統(tǒng)維數(shù)較大時可以減小計算量。綜上可知,SRUKF相對于EKF提高了濾波精度,相對于UKF縮短了對準時間,這種改進的方法提高了對準效率。
5 結論
提出了超球體平方根平淡卡爾曼方法,該方法是通過SSUT與平方根濾波結合,解決了UKF數(shù)值不穩(wěn)定性的問題,同時當系統(tǒng)維數(shù)較大時降低了計算量。將超球體平方根平淡卡爾曼濾波方法應用到SINS大失準角下的初始對準當中,仿真結果表明:SRUKF對于EKF能有效提高方位失準角對準精度,由18.75′提高到了3.85′;相對于 UKF雖然精度差不多,但是減少了采樣點,減小了計算量,提高了計算效率,是一種理想的濾波方法。
[1]鄧正隆.慣性導航原理[M].哈爾濱:哈爾濱工業(yè)大學出版社,1994.
[2]李濤.非線性濾波方法存導航系統(tǒng)中的應用研究[D].長沙:國防科技大學,2003.
[3]Hovland G E,Von Hoff T P,Gallestey E A.Nonlinear estimation methods for parameter tracking in power plants[J].Control Engineering Practice,2005(13):1 341-1 345.
[4]NING Xiaolin,F(xiàn)ANG Jiangcheng.An autonomous celestial navigation for LEO salellite based on unscented kalman filter and information fusion[J].Aerospace Science and Technology,2007(11):222-228.
[5]龍瑞,秦永元,趙長山.簡化SPKF在捷聯(lián)慣導系統(tǒng)非線性對準中的應用[J].壓電與聲光,2010,32(5):746-749.LONG Rui,QIN Yongyuan,ZHAO Changshan.Application of simplified SPKF in non-linear alignment of SINS[J].Piezoelectrics & Acoustooptics,2010,32(5):746-749.
[6]Julier S J,Uhlmann J K.Reduced sigma point filters for the propagation of means and covariance through nonlinear transformations[C]//AACC Proceedings of American Control Conference,2002:887-892
[7]Simon J Julier.The spherical simplex unscented transformation[J].Proceddings of the IEEE American Control Conference,Denver Colorado,2003:2 430-2 434
[8]SONG Qi,HAN Jianda.An adaptive UKF algorithm for the state and parameter estimations of a mobile robot[J].Acta Automatica Sinica,2008,34(1):72-79.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56