水下火箭彈引信定距用渦輪流體動力特性
2012-12-01 02:11:32齊獻山李豪杰沈德璋
探測與控制學報 2012年5期
齊獻山,李豪杰,沈德璋
(南京理工大學機械工程學院,江蘇 南京 210094)
0 引言
小型水下潛艇等需要一種便于攜帶且殺傷力較大的武器作為自衛和攻擊的手段。水下火箭彈由于體積小,對發射平臺要求較低,爆破威力較大,所以非常適用于這一領域[1]。由于水下火箭彈速度快、射程較小,所以其解除保險可用的時間段很窄。因此需要一種體積小、精度較高的定距解除保險機構。
傳統的引信延期解除保險方式主要有:火藥延期、易熔合金、鐘表機構、準流體延期[2-3]、氣阻機構、球轉子[4]、保險帶及各種機電遠解機構等。其中大部分是通過控制時間來實現在預定距離解除保險[2]。水下火箭彈在不同水深位置發射時其外彈道速度-時間曲線有較大變化,定時的方法難以獲得較高的遠解精度[3]。有部分迫彈、船舶運用渦輪進行延期解除保險或測量行進速度,但前者工作段在空氣中,后者運動速度較低。渦輪在高速水下運動時的流體動力學性能參數未知。
由于高速水洞技術難度太大,目前國內水洞的最大流速只有18m/s[4],遠不能達到水下火箭彈工作速度,所以通過水洞實驗的方法獲得高速運動下的渦輪轉動狀態是不可行的。文獻[5]對切向式渦輪流量傳感器進行了三維流場仿真。和試驗結果對比表明,模擬計算儀表系數相對誤差最大值為7.51%。文獻[6]對引信渦輪發電機的空氣動力學、機械學、電磁學理論建立了數學模型,編制了仿真程序,進行了模擬。結果證明負載電壓和彈速之間關系穩定,仿真結果對實驗有很好的預測效果。以上文獻說明仿真的方法對于渦輪在空氣中運動的仿真是可行的,且精確度較高。本文研究的對象包圍在水介質中,由于水相對于空氣比重大、不可壓縮。且水中受到湍流、空化等現象的影響,水中渦輪轉動規律與在空氣中存在很大差別。且水下火箭彈彈速較快,可達80m/s以上,其高彈速下渦輪轉速特點和低彈速下有很大不同。
為獲得渦輪在水下定距過程中的啟動速度,渦輪轉速和彈速對應曲線的線性度及其受水深環境的影響。通過ANSYS14.0中的ICEM和FLUENT模塊對渦輪定距解除保險裝置進行了仿真。得到了47組不同彈速、水壓參數(該機構的常用工作環境)下的渦輪-彈速間的對應關系和受水深影響特性。
1 仿真方法
1.1 計算模型
1.1.1 渦輪外形
為減小渦輪對彈道的影響,本文渦輪模型的外輪廓和彈頭保持一致。渦輪輪葉8片,附著在一個頂面直徑8mm,底面直徑13.88mm,高13mm的錐形臺上,該結構可以有效增加渦輪推動力矩和表面壓力,從而降低啟動速度,減小空化面積[7]。輪葉厚度0.8mm,螺旋轉角32°,如圖1所示。
1.1.2 流場區域
根據水中流場分布特點,模型充分考慮了流場的擴散,在計算機能力允許的范圍內,選取了較大流場區進行仿真。包含渦輪前180mm,后(含彈頭)187 mm。為降低壁面影響,選流場直徑為240mm(如圖2所示)。為使網格在計算機計算能力范圍內盡量的細致,選取該模型軸向的1/8扇形(一個輪葉所對角度)進行網格劃分,通過周期性邊界獲得整體數據。
不難證明:在模型切割時,圓柱體截面的1/8扇形沿軸線投影落在扇形角平分線法線上時,所切得部分可以通過周期性旋轉還原圓柱體。按照以上結論進行周期性建模,可以解決流場角度尖銳導致網格質量下降的問題。渦輪部分網格如圖3所示。

圖1 渦輪結構Fig.1 The structure of turbine
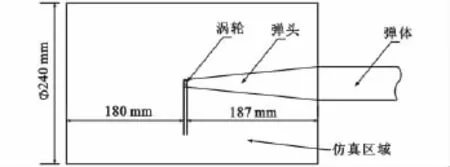
圖2 仿真區域示意圖Fig.2 Schematic diagram of simulation area

圖3 中心區域網格分布圖Fig.3 Central area grid
1.2 平衡條件
1.2.1 動力矩
渦輪轉動的動力來源由渦輪表面壓強對旋轉軸的力矩積分得到,仿真計算結束后,可以通過軟件的report選項自動積分得到該力矩的值。
1.2.2 阻力矩[8]
渦輪轉動的阻力主要是軸承摩擦力矩。計算采用軸承設計中應用較普遍的Palmgren提出的算法。摩擦力矩M為載荷項M1和速度項M0的和。

M0反映了潤滑劑的流體動力損耗,在運動粘度v(mm2/s)與轉速n(r/min)的乘積vn≥2 000時

vn<2 000時

式(3)中,dm為軸承平均半徑,dm= (d+D)/2,d、D分別為軸承內、外直徑;f0為與軸承類型和潤滑方式有關的經驗常數;n為軸承轉速;v為在工作溫度下潤滑劑的運動粘度。
載荷項M1反映了彈性滯后和局部差動滑動的摩擦損耗,M1可按照下式計算

式(4)中,f1為與軸承類型和所受載荷有關的系數;P1為確定軸承摩擦力矩的計算載荷P1=XFr+YFa;其中Fr,Fa分別為軸承所受徑向、軸向載荷,X,Y分別為徑向、軸向系數。
1.2.3 啟動速度
在啟動速度仿真時,將渦輪轉速設為0,在給定水深情況下,初定彈速值,根據仿真結果判斷渦輪所受動力矩和靜摩擦力大小,多次修改彈速使其達到平衡狀態,得到該水深下的渦輪啟動速度。靜摩擦力矩采用Palmgren算法的M1項(由于軸承相對靜止M0=0)。
1.2.4 轉動平衡狀態
根據水下火箭彈的使用環境選取多組計算參數(包括彈速、水深等)。在一定的彈速、水深下,根據經驗估計渦輪轉速值進行仿真計算。據仿真結果計算推動力矩和摩擦力矩大小,據此修改渦輪轉速的設定值。經過多次計算修改后得到渦輪受力平衡狀態下的渦輪轉速值。
2 仿真結果
2.1 渦輪轉速隨彈速的變化曲線
為了得到彈體速度和渦輪轉速之間的關系,根據小型潛艇和水下火箭彈的工作特點,在水深20m處,彈速0~100m/s間選取了12個速度點進行仿真,得到渦輪轉速-彈速對應關系,如圖4所示。
由圖4數據可見,在水深20m時渦輪啟動速度約2.97m/s,在10~90m/s范圍內渦輪轉速和彈速間線性度良好。在速度小于10m/s和大于90m/s時線性度相對較差,但是變化平緩,偏離較小。

圖4 渦輪轉速隨彈速變化曲線Fig.4 The rotational speed of the turbine with the projectile velocity curve
2.2 渦輪啟動時的速度隨水深的變化曲線
為獲得渦輪的啟動性能。在水深1~50m內選取了8組參數進行了仿真計算,結果如圖5所示。
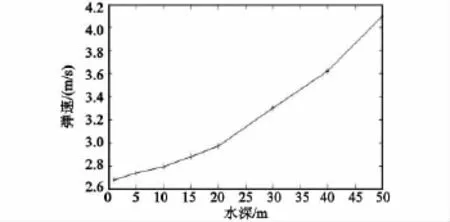
圖5 渦輪啟動速度與水深關系曲線Fig.5 The relationship between turbine start speed and water depth
渦輪啟動時的彈速隨水深增加有所上升,在水下50m水深以內,渦輪機構的啟動速度小于4.1 m/s(約2.9m/s)。
2.3 渦輪轉速隨水深的變化曲線
為了驗證水深條件對渦輪轉速的影響,根據水下火箭彈主要工作階段速度和水深,選取20m/s、40m/s、80m/s三種情況下,水深在1~50m 間分別進行仿真計算。最終結果如圖6—圖8所示。
由此可見在彈速20m/s情況下,隨著水深的增加,渦輪轉速降低。在彈速40m/s情況下,渦輪轉速并不是隨水深一致變化,而是先隨水深的增加而增加,隨后又隨水深增加而減小。在彈速80m/s情況下,渦輪轉速隨水深變化較小。

圖6 彈速20m/s時水深和渦輪轉速對應曲線Fig.6 The outlet pressure and turbine speed curves under the projectile velocity of 20m/s

圖7 彈速40m/s時水深和渦輪轉速對應曲線Fig.7 The outlet pressure and turbine speed curves under the projectile velocity of 40m/s
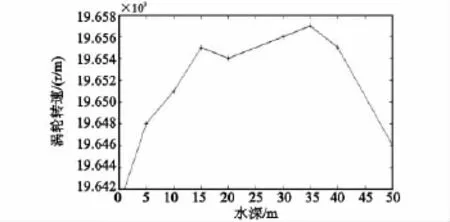
圖8 彈速80m/s時水深和渦輪轉速對應曲線Fig.8 The outlet pressure and turbine speed curves under the projectile velocity of 80m/s
3 結果分析
3.1 渦輪轉速與彈速關系分析
根據以上實驗結果在速度小于10m/s和大于90m/s時線性度變差。分析原因為:彈速較低時,由于靜壓力以及啟動摩擦力的影響,啟動時速度不穩定且轉速增加較慢。由于水下火箭彈工作速度遠大于這個值,所以該區域的誤差對定距沒有影響,可以忽略。彈速較高時,水流的穩定性降低,且渦輪葉片附近出現較大面積的空化泡,造成渦輪轉矩表面受力面減小,線性度下降。若進一步提高精度,可以根據實驗及使用時積累的數據,建立彈速-渦輪轉速表,每次獲得渦輪轉速數據后查表獲得對應的彈速。根據以上數據利用最小二乘法擬合求得渦輪轉速和彈速間的線性度為99.96%,線性度良好。
3.2 渦輪啟動時的彈速度受水深的影響分析
由圖5可見,渦輪啟動時的彈速隨水深增加而上升,分析其原因為:隨著水深的增加渦輪表面受到的壓力增大,摩擦力隨之增加。渦輪啟動時的彈速增加。在1~50m水深范圍內,渦輪啟動時的彈速不大于4.1m/s。由于水下火箭彈工作段彈道速度大于這個值,因此對定距解除保險沒有影響。
3.3 渦輪轉速受水深影響分析
誤差計算方法為該情況下最大值與最小值之差與平均值之比:

式(5)中,ωmax為圖中轉速最大值。ωmin為圖中轉速的最小值。
彈速20m/s情況下,隨著水深的增加,渦輪頂面壓力增大,摩擦力增大,轉速降低。據式(5)得水深變化引起的誤差最大值約3.5%,由于水下火箭彈射程較短,誤差積累值不大。
彈速40m/s情況下,水深較淺的情況下,渦輪周圍壓力較小,較易產生空化氣泡,隨著水深下降,渦輪表面壓力增大,空化現象減弱,有利于渦輪轉速的增加。但水深達到15m后,空泡已經很少,而且隨水深增加渦輪軸承摩擦力會隨著正壓力的增加而增加,渦輪轉速開始下降。如圖9所示。根據式(5)計算得,在1~50m深范圍內渦輪轉速的變化不大于1.7%,誤差較小。
圖9 彈速40m/s時,水深1m、20m情況下空化現象對比Fig.9 Cavitation phenomenon contrast between water depth of 1mand 20munder the projectile velocity 40m/s
彈速80m/s情況下,由于彈體運動產生的壓力遠大于由于水深增加而增大的壓力,所以渦輪轉速隨水深變化很小。根據式(5)計算得,最大誤差約為0.1%,使用中可以忽略。
由以上分析可知,隨彈速增加渦輪轉速受水深的影響變小。這與彈速增加時彈體表面壓力增加,水深產生的壓力比重減小一致。根據某火箭彈彈速分布估算得,整體誤差約為2.4%。
3.4 仿真方法分析
葉輪的流動是非常復雜的,要想準確地了解和掌握內部的流動規律很困難。CFD能夠很好地解決內部流動計算所遇到的問題。FLUENT是目前功能最全、適用性最廣、國內使用最廣泛的CFD軟件之一,具有靈活的網格特性,可以精確計算多種情況下的流體力學仿真。國內外許多科研工作者利用CFD數值仿真模擬技術,研究了內部流動狀況[9]。由此可見該方法所得的結果可信度較高。
4 結論
本文通過仿真得到了渦輪在水下火箭彈引信定距結構中應用的特性。由仿真數據可見,渦輪定距保險機構中,渦輪啟動速度較低(水深20m時約2.97m/s),渦輪轉速和彈速之間線性度良好,在水深0~50m、彈速10~100m/s內,由水深產生的誤差約為2.4%。分析表明該仿真方法成熟、結果可信度較高,數據中存在的問題有合理的解釋,對于水下火箭彈定距誤差較小,可以在設計中應用。
仿真的不足之處在于軟件仿真數據會和實際情況存在偏差,因此需要實際彈道參數予以矯正。如果下一步能夠獲得全面的彈道數據就可以建立渦輪轉速和彈速對應函數,就可以提高定距精度。
[1]石秀華,王曉娟.水中兵器概論[M].西安:西北工業大學出版社,2005.
[2]石庚辰,李華.引信 MEMS遠距離解除保險機構[J].探測與控制學報,2008,30(3):1-4.SHI Gengchen,LI Hua.Fuze's MEMS delay arming device[J].Journal of Detection & Control,2008,30(3):1-4.
[3]沈德璋,張合,李豪杰.基于數值仿真的水下火箭彈引信遠解機構取壓點優選[J].彈道學報,2010,12(4):36-44.SHEN Dezhang,ZHANG He,LI Haojie.Pressure detection point optimization for delay arming device of underwater rocket fuze based on numerical simulation[J].Journal of Ballistics,2010,12(4):36-44.
[4]李淼,羅凱,胡峰,等.水洞超空泡人工通氣控制系統設計[J].計算機測量與控制,2011,19(9):2 151-2 153.LI Miao,LUO kai,HU Feng,et al.Artificial ventilation control system for water tunnel supercavitation vehicle[J].Computer Measurement & Control,2011,19(9):2 151-2 153.
[5]王振,張濤,徐英.測量小流量的切向式渦輪流量傳感器的仿真與實驗[J].天津大學學報,2007,40(9):1 048-1 053.WANG Zhen,ZHANG Tao,XU Ying.Simulation and experiment on tangential type turbine flow sensor for measurement of low flow rate[J].Journal of Tianjin University,2007,40(9):1 048-1 053.
[6]朱繼南,林桂卿.引信渦輪發電機彈道發電模型和計算[J].兵工學報,1993,8(3):31-37.ZHU Jinan,LIN Guiqing.Fuze turbine generator trajectory generation model and calculation[J].Acta Armamentard,1993,8(3):31-37.
[7]王獻孚.空化泡和超空化泡流動理論及應用[M].北京:國防工業出版社,2009.
[8]張松林.最新軸承手冊[M].北京:電子工業出版社,2007.
[9]吳玉林.葉片泵設計與實例[M].北京:機械工業出版社,2011.