采用BUCK 電路的低電感無刷直流電動機轉矩脈動與損耗分析
2012-11-22 07:51:54侯紅勝劉衛國馬瑞卿
微特電機 2012年7期
侯紅勝,劉衛國,馬瑞卿
( 西北工業大學,陜西西安710072) )
0 引 言
無刷直流電動機具有與直流電動機相媲美的優良動、靜態特性,同時又具有結構簡單、體積小、功率密度大、效率高等優點,在家用電器、儀器儀表、航空航天等領域得到了廣泛的應用。無刷直流電動機驅動電路大多數采用直流電源與六開關管逆變電路直接相連的方式,如圖1 所示,通過對逆變電路PWM控制實現無刷直流電動機的穩速、調速等控制。
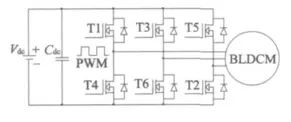
圖1 無刷直流電動機驅動電路
在無刷直流電動機控制中,當采用二二導通、三相六狀態的120°導通方式時,逆變電路的調制方式有H_PWM-L_ON、H_ON-L_PWM、ON -PWM、PWM-ON 和PWM-ON-PWM 等調制方法[1-2],甚至可以采用雙極性調制方法[3]。當驅動一些電樞電感非常小的無刷直流電動機,如空心杯無刷電動機等,其電感只有十幾到幾十微亨,這些帶PWM 的調制方式均會引起電樞繞組電流有很大的脈動,會產生較大的轉矩脈動、銅損耗和鐵損耗。通過分析無刷直流驅動電路的特點,在逆變電路之前采用BUCK 電路,使逆變電路輸入電壓可變,而逆變電路中不采用PWM 斬波,即只采用Hall 位置信號進行電子換相,可以降低其電流脈動、轉矩脈動和損耗。通過合理的器件選型和硬件電路設計BUCK 電路完全可以適用于無刷直流電動機的驅動電路中[4]。
1 BUCK 電路
BUCK 變換電路是一種降壓型DC /DC 變換器,通過斬波方式的控制能將直流輸入電壓變換成輸出可變的直流電壓。BUCK 電路最大的優點是損耗低、效率高,電路簡單,如圖2 所示。T 為功率開關管,D 為續流二極管,L為濾波電感,C 為濾波電容,L、C 構成一個低通濾波器,用于獲得所需的直流輸出電壓和電流。
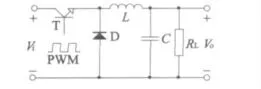
圖2 BUCK 電壓變換電路
濾波電感和電容值根據設計需求的紋波電壓和電流來計算,由式( 1) 、式( 2) 確定[5]:
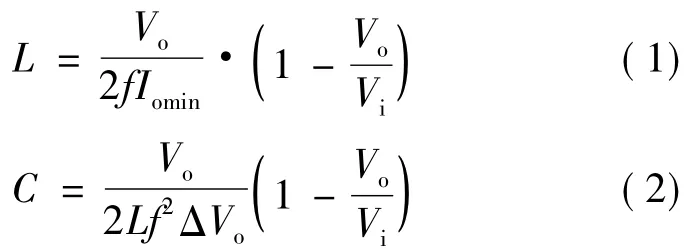
式中: L 為濾波電感值; C 為濾波電容值; Vo為輸出電壓; Vi為輸入電壓; Iomin為穩壓器輸出電流最小值; ΔVo為交流電壓輸出分量; f 為開關管工作頻率。
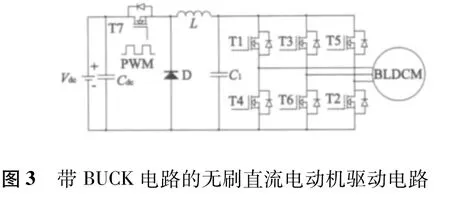
本文將BUCK 變換電路應用在一臺功率為200 W、額定電壓48 V、額定轉速15 800r/min 的無刷直流電動機驅動電路中,如圖3 所示。通過電流和電壓反饋對BUCK 電路的開關管進行PWM 調制,使輸入到逆變電路的電壓實時調整,逆變電路根據轉子位置傳感器信號只進行換相控制。
2 低電感無刷直流電動機特點
低電感無刷直流電動機由于其電樞電感只有十幾微亨到幾十微亨,在采用逆變電路PWM 驅動時,其繞組電流容易出現斷流,如圖4( a) 所示。其帶來的問題主要如下:
( 1) 由于電流斷續,電磁轉矩脈動很大,如圖4( b) 所示;
( 2) 由于電流轉矩脈動很大,由定子電流的PWM 分量所引起的鐵損耗具有高頻電流分量,引起高頻磁場,這一高頻磁場會在定子、轉子中產生渦流損耗,電流脈動幅值越大,損耗越大[6]。
( 3) 采用H_PWM-L_ON,H_ON-L_PWM,ON-PWM 等PWM 調制方式時,換相期間會產生電樞電流回饋到直流端的現象,如圖4( c) 所示。反向電流會影響直流端電壓波形[1]。
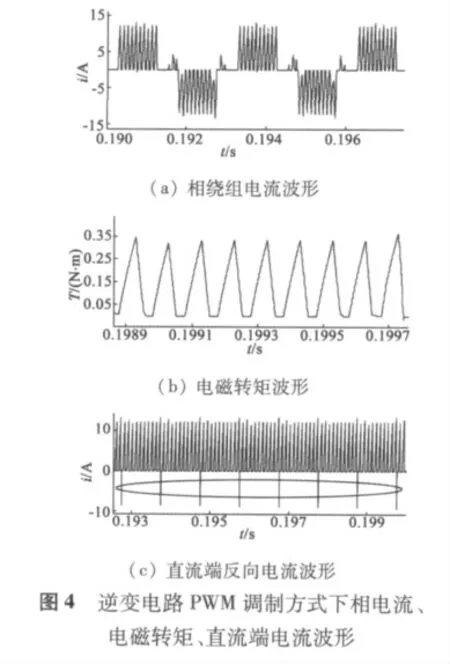
( 4) 當帶動同樣的負載情況下,其電樞電流平均值相等,電流脈動越大,其有效值越大,所以其銅損耗越大。
3 無刷直流電動機的仿真模型
帶BUCK 前級變換電路的無刷直流電動機驅動電路模型如圖5 所示。由控制模塊、DC /DC 模塊、逆變模塊、無刷直流電動機本體模塊和邏輯換相模塊五部分組成。
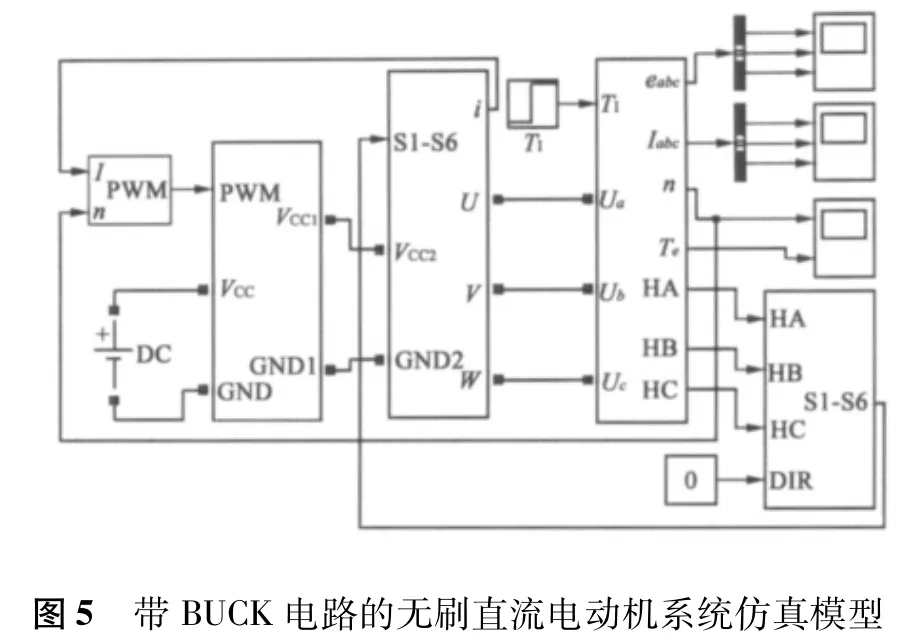
其中控制模塊對轉速、電流進行雙閉環控制,控制算法采用PI,控制模塊模型如圖6 所示。速度環是外環,電流環是內環,雙閉環的輸出經過限幅后與PWM 生成模塊進行比較,得出占空比控制BUCK 電路的開關器件。實時調節逆變驅動電路輸入電壓。電機輸出轉速給定值為10 ?000r/min。無刷直流電動機主要參數如表1 所示。
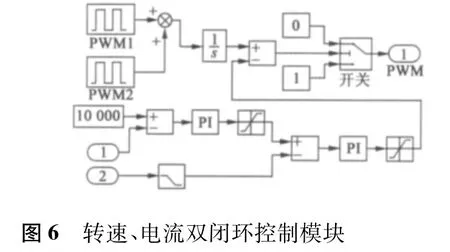

表1 無刷直流電動機主要參數
4 仿真結果及分析
通過對圖5 建立的無刷直流電動機及驅動電路模型,根據表1 設置參數,并進行仿真。
4.1 電機電流和電磁轉矩
圖7 是相繞組電流、電磁轉矩和直流端電流的仿真波形。其轉速給定和負載轉矩等參數與圖4 相同,圖4 中采用的PWM 斬波頻率為10 kHz。
對比圖7 和圖4,可以看出采用前級BUCK 變換電路后,有以下特點:
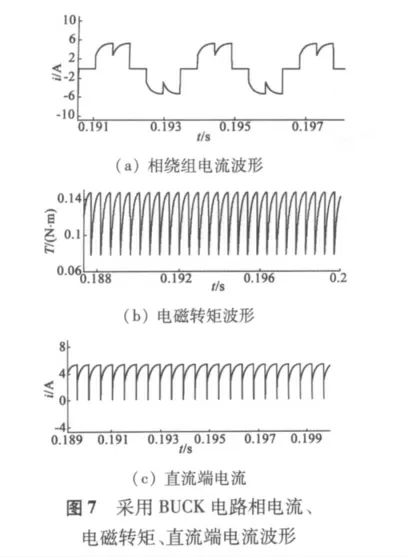
( 1) 繞組電流最大值從12 A 降到5.2 A,相繞組電流由不連續到連續,在導通工作期間脈動較小,不導通期間不會產生感應電流;
( 2) 電磁轉矩最大值從0.35 N·m 降到0.15 N·m,且一直大于零,轉矩脈動明顯降低;
( 3) 直流電源端無反向電流,換相期間關斷相繞組電流通過逆變電路和導通相繞組構成回路。
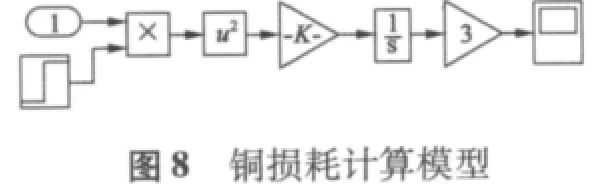
4.2 繞組銅損耗
無刷直流電動機由于三相電流對稱,在計算銅損耗時,取其中一相繞組電流進行計算,結果乘以3得到電機總的銅損耗,如圖8 所示。階躍信號用于電機達到穩速后開始計算電機銅損耗。系統在0.1 s 時加額定負載,計算0.2~1.0 s 時間內繞組銅損耗,圖9 是采用逆變電路PWM 調制方式和前級采用BUCK 電路的銅損耗計算結果。

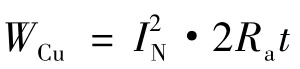
當電機繞組電流為理想狀態時,即電機繞組電流為方波電流,此時電機銅損耗:
當采用逆變電路PWM 驅動方式時,由于電流不連續性,其有效值大大增加,銅損耗達到了12.85 J,幾乎增加了近一倍。當采用前級BUCK 電路后,銅損耗為7.01 J,比理想狀態下只增加了不到3%。
4.3 電機鐵損耗
無刷直流電動機的鐵耗包括永磁磁場旋轉在定子鐵心中引起的鐵耗; 定子電流非連續跳變在轉子中引起的鐵耗和定子電流的PWM 分量所引起的附加損耗[6]。由于無刷直流電動機電樞繞組電感很小,定子電流PWM 分量非常明顯,甚至使得繞組電流降低到零。減小PWM 分量可以通過提高PWM的調制頻率來實現。圖10 是當PWM 頻率達到100 kHz 時相繞組電流波形。
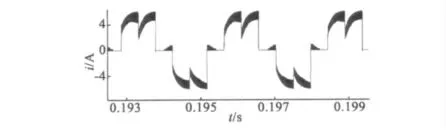
圖10 PWM 頻率100 kHz 時相繞組電流波形
從圖10 可以看出,當提高調制頻率后,相繞組電流幅值相比于圖4( a) 明顯降低,但是比圖7( a)要高。由于渦流損耗是電流脈動幅值平方的函數[6-7],所以減小電流脈動的幅值可以降低電機的鐵損耗。采用BUCK 電路后電流脈動比采用提高調制頻率后電流脈動小,且提高功率器件的開關頻率會增加消耗在功率器件上的損耗。
5 結 論
本文針對小電感無刷直流電動機的特點,通過對逆變電路前級增加BUCK 電路進行電壓實時調整,通過仿真和對比可以得出采用BUCK 電路后,無刷直流電動機能夠在以下幾個方面得到明顯改善:
( 1) 相繞組電流和直流端電流脈動明顯減小,電磁轉矩脈動也相應減小;
( 2) 換相過程中繞組電流不會反饋到直流端,換相結束后不導通相不會產生電流;
( 3) 電機的銅損耗大大降低,接近理想銅損耗狀態;
( 4) 電機的鐵損耗隨著電流脈動的減小而降低。
[1] Lai Yen-shin,Shyu Fu-San,Lin Yong-Kai.Novel PWM Technique without Causing Reversal DC-Link Current for Brushless DC Motor Drives with Bootstrap Driver[J].IEEE Trans.Ind.Appl.,2005,3: 2182-2188.
[2] 張相軍,陳伯時.無刷直流電機控制系統中的PWM 調制方式時換相轉矩脈動的影響[J].電機與控制學報,2003,7( 2) :87 -91.
[3] 李自成,程善美,蔡凱,等.減小無刷直流電機轉矩脈動的PWM 新方式[J].華中科技大學學報,2009,37( 11) : 1-4.
[4] 劉嘉明,沈建新,王凱.用于高速無刷直流電機調速的BUCK直流調壓器的設計與優化[J].微電機,2010( 9) : 93-96.
[5] 葉慧貞,楊興洲.新穎開關穩壓電源[M].北京: 國防工業出版社,1999.
[6] 劉剛,王志強,房建成.永磁無刷直流電機控制技術與應用[M].北京: 機械工業出版社,2008.
[7] Fang Deng,Nehl T W.Analytical Modeling of Eddy-Current Losses Caused By Pulse-Width-Modulation Switching in Permanent Magnet Brushless Direct-Current Motors[J].IEEE Trans.On Magnetics,1998,34( 5) :3728-3736.