離心機加速度反饋方式研究
2012-11-12 11:20:08薛常斌
長江科學院院報 2012年3期
關鍵詞:系統
薛常斌,栗 慶
(中國工程物理研究院總體工程研究所,四川綿陽 621900)
離心機加速度反饋方式是指在離心機轉臂上或吊艙內的某個用戶關心的位置安裝一個線加速度計,在離心機運行時,以線加速度計的值作為反饋,與系統過載設定值進行比較,若產生過載誤差則通過閉環控制器來調節,從而修正誤差,使線加速度計反饋值與過載設定值相吻合。通過這種反饋方式,用戶可以更直觀地監測到所關心位置的過載情況,對有過載考核要求的試驗有重要的參考價值。
1 閉環控制系統
線加速度計的輸出電壓為一連續的模擬量,在模擬量(連續)控制系統中,為了保證控制系統的輸出能夠很好地跟隨輸入給定的變化,采用了如圖1所示的閉環控制系統。
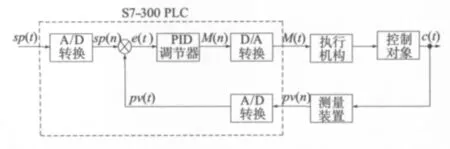
圖1 閉環模擬控制系統的組成Fig.1 Structure of the closed-loop control system of analog quantity
閉環控制系統基于反饋的概念,測量關心的變量,與期望值相比較,用這個誤差調整控制系統的響應。這個理論和應用的關鍵是:做出正確的測量和比較后,如何才能更好地糾正系統,而調節器正是閉環控制系統的核心部件。
在工程實際中,應用最為廣泛的調節器控制規律為比例控制、積分控制、微分控制,簡稱PID控制,又稱PID調節。當被控對象的結構和參數不能完全掌握,或得不到精確的數學模型,且控制理論的其它技術難以采用時,系統控制器的結構和參數需依靠經驗和現場調試來確定,這時可應用PID控制技術。即當我們不完全了解一個系統和被控對象﹐或不能通過有效的測量手段來獲得系統參數時,最適合用PID控制技術。
在實際閉環控制系統中,誤差e(t)是1個很小的變化量,因此,為了對系統進行更精確的控制、消除系統在穩態時的輸出誤差、改善系統的動態響應性能,需要對誤差e(t)進行比例調節(P)、積分(I)、微分(D)等處理,才能有效地控制系統中的執行機構,保證系統具有良好的動、靜態性能。
西門子S7-300PLC具有PID調節的功能,所以確定以西門子S7-300PLC為核心組成閉環模擬量控制系統。
1.1 閉環系統組成的確定
以西門子S7-300PLC為核心組成PID調節閉環系統,硬件組態如圖2所示。使用西門子PS307/5A電源模塊、cpu315-2 pn/dp、2點模擬量輸入模塊SM331、16點數字量輸入模塊SM321、8點數字量輸出模塊SM322、2點模擬量輸出模塊SM332各1塊。
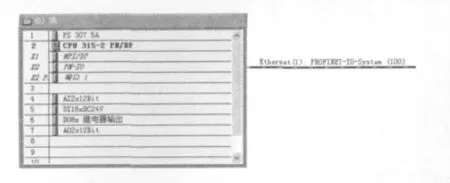
圖2 PLC硬件組態圖Fig.2 The configuration of PLC hardware
1.2 PID調節被控量的實現
在本閉環控制系統中,給定為0~10 V可調電壓源,反饋為線加速度計輸出電壓,這2個值都通過PLC模擬量輸入模塊采集進入PLC中,被控量為給定電壓源與線加速度計反饋電壓值的偏差值,此偏差值為一連續的模擬量信號,可以送入PLC軟件模塊 FB41“CONT_C”(連續控制器,如圖3所示)進行PID調節,調節后的值通過PLC模擬量輸出模塊輸出至驅動器。
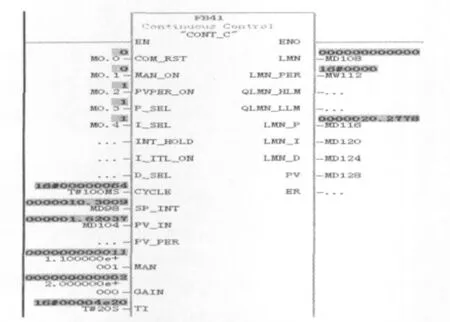
圖3 FB41程序圖Fig.3 FB41 module of PLC
2 試驗驗證
2.1 離心機試驗特性
離心機是由安裝試驗件的吊籃、轉臂、平衡配重、轉臺、減速裝置、電機、集流環和測控系統等組成。在電機的拖動下,吊籃作等速圓周運動,試驗件上產生恒加速度環境,即

由公式(1)可推導出

式中:G為離心機加速度(g);ω為離心機角速度(rad/s);R為試驗件重心離旋轉中心的距離(m);n為離心機轉速(r/min)。
2.2 試驗過程
在離心機上安裝夾具工裝,如圖4所示。夾具設計成中正方體鐵塊,頂部有孔,中間是空心的,底面焊接了1個500mm×500mm的鐵板,其接口按照離心機吊籃底板上的安裝孔位設計,整個夾具安裝在離心機吊籃上。線加速度計安裝在夾具的頂部(圖中圓形物體)。

圖4 線加速度計安裝示意圖Fig.4 The installation of linear accelerometer
2.3 試驗方案
利用現有離心機進行試驗,線加速度計安裝在吊籃底板平臺上,試驗G值范圍為0~50 g。在相應G值上測量線加速度計反饋回來的電壓輸出值,與給定電壓源進行比較;線加速度計反饋電壓值及給定電壓值均由PLC中的模擬量輸入模塊采集完成;采集的數據通過PLC中的PID模塊比較,比較結果再通過PID調節器輸出至PLC模擬量輸出模塊;最后輸出至離心機直流調速器,驅動執行機構(電機),控制離心機轉速。
2.4 試驗結果
使用PLC開發軟件STEP7進行了PID調節程序設計,程序采用梯形圖的方式,最終的被控量通過模擬量輸出模塊輸出至直流調速器。在控制程序編制完成后,連接PLC、主控計算機和調速器,按照控制要求設置各項控制參數,完成控制系統聯調。
以下為一實例。離心機停機時,手動調節給定電源為989 mV,即功能塊 FB41參數SP_INT為9.89;加速度計反饋電壓值為162 mV(零點電壓),即功能塊FB41參數PV_IN為1.62。此時對功能塊FB41參數Gain和TI參數進行調節,將PID輸出值(功能塊FB41參數LMN)輸出至模擬量輸出模塊,此電壓值輸出至驅動器中的模擬量輸入端子,作為給定啟動離心機旋轉,改變不同的P,I參數,觀察PID調節效果(表1)。
試驗中,通過P,I參數的調節(D參數沒有使用),發現P,I參數太大或太小都不能滿足控制要求,當P=0.05,I=1 時,輸出 LMN 值穩定為18.325,給定曲線(紅色曲線)和反饋曲線(黃色曲線)基本重合,如圖5所示。圖中加速度給定電壓值為989 mV,對應給定加速度值為6.01 g,實際調節后轉速穩定為52.25 r/min,反饋加速度值為6.08 g,誤差為1.12%,調節過程對應轉速與時間曲線如圖6所示。
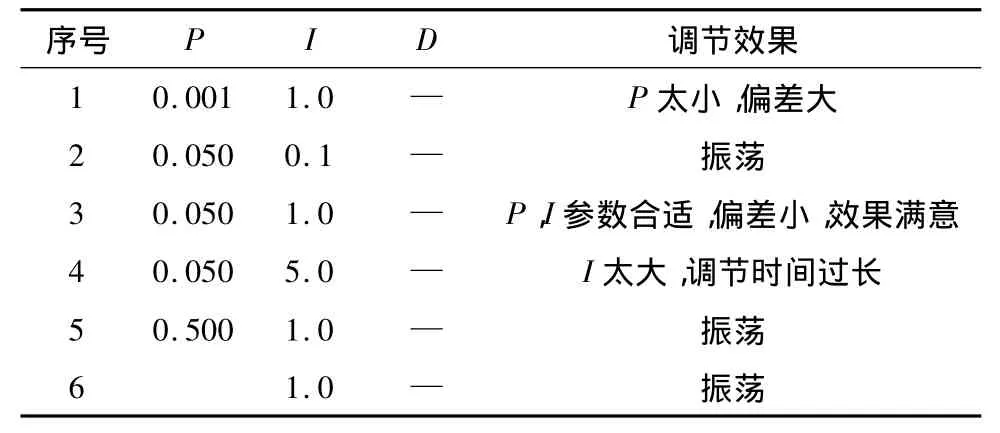
表1 PID實際參數及調節效果表Table 1 The PID actual parameters and the adjustment results
圖5 PID調節曲線圖(P=0.05,I=1)Fig.5 PID adjustment graph(P=0.05,I=1)
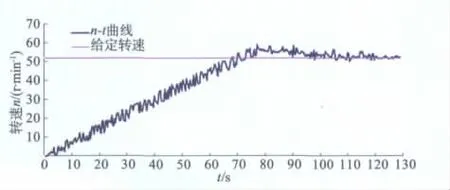
圖6 轉速-時間曲線圖(P=0.05,I=1)Fig.6 Rotate speed-time graph(P=0.05,I=1)
從圖6中可以看出給定曲線和反饋曲線的偏差很小,滿足控制要求。實際使用中,當取P,I參數為P=0.05,I=1 時,進行連續試驗,給定電壓從164.5~4 935 mV進行了調整,對應于加速度值為1~30 g,其反饋電壓輸出值與給定電壓值基本吻合,誤差在1%左右。
3 結論
通過試驗,說明在離心機上采用線加速度計反饋控制方式是可行的。試驗中根據線加速度計的加速度與輸出電壓線性關系設定給定電壓,實現了線加速度計反饋控制。從圖5、圖6可看出,給定曲線和反饋曲線仍未實現完全無偏差,分析原因認為是由離心機吊籃的擺動所引起的,在恒加速度試驗時,機械傳動機構或軸承間隙、轉臂兩邊質量不平衡等因素造成離心機試驗轉速波動,從而使加速度出現波動。
[1]陸惠良.載人離心機及其應用[M].北京:國防工業出版社,2004.(LU Hui-Liang.Man-Carrying Centrifuge and Its Application[M].Beijing:National Defence Industry Press,2004.(in Chinese))
[2]龔仲華.S7-200/300/400 PLC應用技術[M].北京:人民郵電出版社,2008.(GONG Zhong-Hua.Applied Technology of S7-200/300/400 PLC[M].Beijing:Posts& Telecom Press,2008.(in Chinese))
[3]李金城.PLC模擬量與通信控制應用實踐[M].北京:電子工業出版社,2011.(LI Jin-cheng.Application Practice of PLCAnalog and Communication Control[M].Beijing:Electronic Industry Press,2011.(in Chinese))
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32