機(jī)械系統(tǒng)仿真課程與其他課程聯(lián)系的教學(xué)探索
2012-10-16 08:00:00喬印虎張春燕張樹鋒
赤峰學(xué)院學(xué)報(bào)·自然科學(xué)版 2012年13期
喬印虎,張春燕,張樹鋒
(安徽科技學(xué)院 工學(xué)院,安徽 鳳陽 233100)
機(jī)械系統(tǒng)仿真課程與其他課程聯(lián)系的教學(xué)探索
喬印虎,張春燕,張樹鋒
(安徽科技學(xué)院 工學(xué)院,安徽 鳳陽 233100)
機(jī)械系統(tǒng)仿真課程是一門車輛工程專業(yè)大四的專業(yè)方向課程,涉及的知識(shí)面廣且泛,課時(shí)較少,單從課程內(nèi)容或者教材內(nèi)容講解學(xué)生理解比較困難,而且很難調(diào)動(dòng)起學(xué)生的學(xué)習(xí)積極性,為了便于學(xué)生在短時(shí)間內(nèi)掌握、理解課程知識(shí)點(diǎn),同時(shí)能調(diào)動(dòng)學(xué)生的學(xué)習(xí)積極性,作者嘗試在上課過程的知識(shí)點(diǎn)講解中引用案例和前期課程相聯(lián)系,讓廣而泛的知識(shí)點(diǎn)更加具體化,易于理解、掌握,取得了較好的效果.
機(jī)械系統(tǒng)仿真課程;案例;教學(xué)
1 引言
機(jī)械系統(tǒng)仿真課程是我校車輛工程專業(yè)大四學(xué)生的一門專業(yè)方向課,這門課程涉及的知識(shí)面廣,從課程表面看好像和前期課程及專業(yè)沒有太大的關(guān)聯(lián),而且課時(shí)較少,18個(gè)實(shí)驗(yàn)課時(shí),18個(gè)理論課時(shí),共36課時(shí),學(xué)生到了大四精力分散嚴(yán)重,同時(shí)學(xué)習(xí)的選擇性和主動(dòng)性有所提高,如果單從這門課程內(nèi)容或者教材本身去講解,學(xué)生理解起來比較困難,很難吸引學(xué)生的學(xué)習(xí)注意力,作者在認(rèn)真分析以上情況后,嘗試在上課過程中講解主要知識(shí)點(diǎn)后,主要引用一些與前期課程、專業(yè)等相關(guān)的實(shí)例分析,并在此基礎(chǔ)上進(jìn)一步深化內(nèi)容,提出具有拓展思維的問題留給學(xué)生課下去完成,并以創(chuàng)新分成績(jī)加到學(xué)生平時(shí)成績(jī),這樣,既便于學(xué)生很快掌握這門課程,在短時(shí)間內(nèi)理解、掌握課程的知識(shí)點(diǎn),又激發(fā)了學(xué)生的學(xué)習(xí)興趣,同時(shí)也拓展了學(xué)生的學(xué)習(xí)思維方法,培養(yǎng)了學(xué)生綜合應(yīng)用專業(yè)知識(shí)解決實(shí)際問題的能力,通過學(xué)生作業(yè)、實(shí)驗(yàn)、課堂表現(xiàn)及學(xué)期末老師和學(xué)生交談、學(xué)生評(píng)教、考試成績(jī)等綜合分析,作者的嘗試取得了較好的效果.
2 實(shí)施方案
表1 機(jī)械系統(tǒng)仿真課程實(shí)施方案
機(jī)械系統(tǒng)仿真課程理論與實(shí)驗(yàn)均為18個(gè)課時(shí),為了使理論與實(shí)踐結(jié)合,理論與實(shí)驗(yàn)都按照2課時(shí)/次安排,實(shí)驗(yàn)和理論各為8次,實(shí)驗(yàn)課晚于理論課1次,實(shí)驗(yàn)課程教材是作者自己編寫,使理論與實(shí)驗(yàn)緊密結(jié)合,根據(jù)課程次數(shù),把這門課程的知識(shí)點(diǎn)歸為8大類,每次課程一個(gè)大的知識(shí)點(diǎn),知識(shí)點(diǎn)后講解一個(gè)和前期課程、專業(yè)或?qū)嵺`等相關(guān)且又便于理解的實(shí)例,具體安排參見表1.
3 具體案例
3.1 與前期課程聯(lián)系
以第2次課程實(shí)例為例進(jìn)行闡述.
3.1.1 案例內(nèi)容
設(shè)一個(gè)直齒二級(jí)齒輪減速器,基本結(jié)構(gòu)幾何參數(shù)如下:第一級(jí):模數(shù) m=4mm,z1=20,z2=50;齒寬 B=40mm;第二級(jí):模數(shù) m=4mm,z1=30,z2=70;齒寬 B=40mm;則第一級(jí)傳動(dòng)小齒輪分度圓直徑為d1=m×z1=80mm,d2=m×z2=200mm;第二級(jí)傳動(dòng)小齒輪分度圓直徑為 d1=m×z1=120mm,d2=m×z2=280mm.
3.1.2 減速器虛擬樣機(jī)設(shè)計(jì)
首先根據(jù)題目要求建立減速器虛擬樣機(jī)模型[3]如圖1所示,然后設(shè)置運(yùn)動(dòng)副,包括4個(gè)轉(zhuǎn)動(dòng)副、1個(gè)固定副及2個(gè)齒輪副,如圖2所示,最后設(shè)置仿真參數(shù),在ADAMS/View驅(qū)動(dòng)庫(kù)中選擇旋轉(zhuǎn)驅(qū)動(dòng)(Rotational Joint Motion)按鈕,在Speed一欄中輸入3000,表示旋轉(zhuǎn)速度3000度/秒.左鍵選小齒輪軸JOINT_1作為驅(qū)動(dòng).為便于計(jì)算,設(shè)置仿真終止時(shí)間(End Time)為 1,仿真工作步長(zhǎng)(Step Size)為 0.01.

圖1 減速器虛擬樣機(jī)模型
圖2 減速器虛擬樣機(jī)添加運(yùn)動(dòng)副

圖3 減速器仿真結(jié)果
3.1.3 結(jié)果分析
減速器仿真[4]結(jié)果如圖3所示,先對(duì)結(jié)果進(jìn)行分析.
①第一級(jí)嚙合運(yùn)動(dòng)分析.因小齒輪齒數(shù)20,大齒輪齒數(shù)50,模數(shù)m=4m,據(jù)傳動(dòng)原理知,對(duì)標(biāo)準(zhǔn)外嚙合漸開線直齒圓柱齒輪傳動(dòng),大齒輪轉(zhuǎn)速為小齒輪的2/5,即3000×(2/5)=1200deg/s.即當(dāng)輸入轉(zhuǎn)速3000deg/s時(shí),一級(jí)減速獲得轉(zhuǎn)速-1200deg/s,負(fù)號(hào)表示方向相反;同樣對(duì)第二級(jí)嚙合進(jìn)行運(yùn)動(dòng)分析.因?yàn)樾↓X輪齒數(shù)為30,大齒輪齒數(shù)70,則最后理論上獲得的轉(zhuǎn)速應(yīng)為1200×3/7=514.286deg/s,二級(jí)減速獲得輸出轉(zhuǎn)速514.3deg/s,所建模型正確,符合標(biāo)準(zhǔn)外嚙合直齒齒輪傳動(dòng)角速度與齒輪的分度圓直徑成反比的結(jié)論.
②ADAMS是以相鄰兩回轉(zhuǎn)軸MARKER點(diǎn)與嚙合MARKER點(diǎn)的距離之比確定傳動(dòng)比的,改變回轉(zhuǎn)軸上MARKER點(diǎn)的位置不影響最終結(jié)果.
③以旋轉(zhuǎn)方式建立齒輪模型可以省卻調(diào)整MARKER點(diǎn)位置的麻煩,但MARKER點(diǎn)z軸的指向應(yīng)根據(jù)實(shí)際線速度方向作相應(yīng)的調(diào)整.
④在嚙合點(diǎn)處,將標(biāo)記點(diǎn)(MARKER)的z軸方向旋轉(zhuǎn)一定角度,就可以仿真斜齒齒輪傳動(dòng)情況.
經(jīng)分析及理論計(jì)算驗(yàn)證,仿真結(jié)果合理,用虛擬樣機(jī)技術(shù)既和前期機(jī)械設(shè)計(jì)課程設(shè)計(jì)知識(shí)緊密聯(lián)系,又證明了應(yīng)用仿真技術(shù)提高了設(shè)計(jì)效率,并保證了設(shè)計(jì)質(zhì)量,使學(xué)生較輕松的掌握了這種仿真方法及ADAMS軟件的使用.
3.2 與專業(yè)、實(shí)際應(yīng)用的聯(lián)系
以第2次課程實(shí)例為例進(jìn)行闡述.
因ADAMS軟件具有很好的動(dòng)力學(xué)仿真性能,但是其只能建立簡(jiǎn)單的機(jī)械結(jié)構(gòu)或系統(tǒng)模型,對(duì)于較復(fù)雜的模型建立費(fèi)時(shí),所以作者嘗試將三維建模功能較好的CATIA軟件和ADAMS結(jié)合使用,突出二者的優(yōu)點(diǎn),具體實(shí)施方法是應(yīng)用CATIA等三維建模軟件建立好三維模型后導(dǎo)入ADAMS如圖4是應(yīng)用CATIA軟件建立并通過專用接口導(dǎo)入到ADAMS中的曲軸連桿活塞機(jī)構(gòu),然后在ADAMS對(duì)導(dǎo)入的活塞連桿機(jī)構(gòu)設(shè)置運(yùn)動(dòng)副及仿真參數(shù)等,并進(jìn)行仿真求解其運(yùn)動(dòng)等參數(shù),如圖5所示.
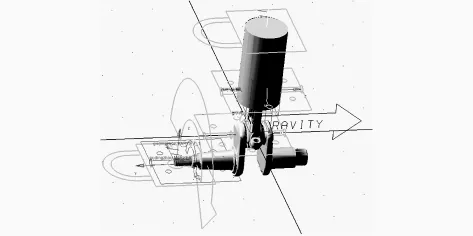
圖4 曲軸連桿活塞機(jī)構(gòu)模型
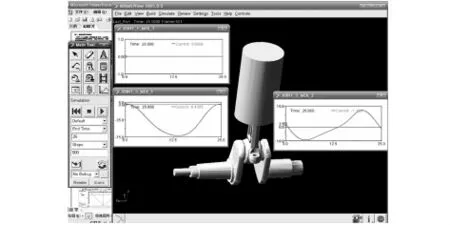
圖5 曲軸連桿活塞機(jī)構(gòu)仿真結(jié)果
將ADAMS軟件和CATIA軟件相結(jié)合,并選擇和機(jī)械結(jié)構(gòu)關(guān)系密切又易于理解的單缸曲軸連桿活塞機(jī)構(gòu)作為實(shí)例對(duì)象,讓學(xué)生易于接受,并形成較直觀的理解,同時(shí)和前期現(xiàn)代工程圖學(xué)實(shí)訓(xùn)CATIA軟件應(yīng)用結(jié)合,幫助學(xué)生認(rèn)識(shí)前期課程的重要性并加強(qiáng)理解,也間接的培養(yǎng)學(xué)生綜合應(yīng)用知識(shí)的能力.
4 實(shí)施效果
通過學(xué)生作業(yè)、實(shí)驗(yàn)、課堂表現(xiàn)及學(xué)期結(jié)束作者和學(xué)生交談、學(xué)生評(píng)教、考試成績(jī)等綜合分析,作者的嘗試取得了較好的效果.
〔1〕余聯(lián)慶,梅順齊,杜利珍,等.ADAMS在機(jī)械系統(tǒng)仿真技術(shù)教學(xué)中的應(yīng)用[J].武漢科技學(xué)院學(xué)報(bào),2008,3(21):5-8.
〔2〕陳立平,張?jiān)魄?任衛(wèi)群,等.機(jī)械系統(tǒng)動(dòng)力學(xué)分析及ADAMS應(yīng)用教程[M].北京:清華大學(xué)出版社,2005.
〔3〕王洪倫,龔烈航,肖斌安.基于虛擬樣機(jī)技術(shù)的工程機(jī)械仿真分析與應(yīng)用研究[J].機(jī)床與液壓,2008,7(36):140-163.
〔4〕宋理敏,湯志遠(yuǎn).產(chǎn)品的機(jī)械系統(tǒng)仿真設(shè)計(jì)[J].機(jī)械工程與自動(dòng)化,2011,4(2):211-216.
G642
A < class="emphasis_bold"> 文章編號(hào):1
1673-260X(2012)07-0225-02
安徽科技學(xué)院重點(diǎn)建設(shè)學(xué)科(AKXK20102-5);安徽省教育廳基金項(xiàng)目(KJ2010B051);安徽科技學(xué)院重點(diǎn)建設(shè)課程(ZDKC1124)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
內(nèi)蒙古教育(2021年20期)2021-03-08 01:09:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
計(jì)算機(jī)教育(2020年5期)2020-07-24 08:53:38
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2019年11期)2019-12-09 09:14:30
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
