無人平臺自主能力分級的四指標模型
2012-08-27 13:13:32李一波王新星姚宗信崔世海申曉玲
電光與控制 2012年10期
李一波, 王新星, 姚宗信, 崔世海, 申曉玲
(1.沈陽航空航天大學,沈陽 110136; 2.沈陽飛機設計研究所,沈陽 110034;3.沈陽航天新樂有限責任公司,沈陽 110031)
0 引言
無人平臺自主水平已成為無人平臺新的技術挑戰。文獻[1]從無人平臺的環境變化量、任務完成度、系統狀態穩定度、操作者和系統的交互程度評判其自主等級;文獻[2]從無人平臺的移動性、能源的獲取和防御能力劃分其自主等級;文獻[3]從無人平臺的移動控制、任務規劃和形式感知衡量其自主能力;文獻[4-8]從任務的復雜度、環境的困難度、人機的交互程度判斷其自主能力水平。然而,這些方法的分級指標都不夠全面,且沒有簡單的方法將分級過程和結果量化,多是主觀判斷。因此,針對以上方法的缺陷,提出了一個無人平臺自主能力分級的四指標模型。
1 四指標分級模型
本文評定無人平臺的自主水平,是根據無人平臺在當前的環境和自身的狀況規劃判斷后任務的完成情況確定其自主能力等級。因此,選定“人和平臺的交互能力”、“態勢感知能力”、“環境適應能力”和“規劃決策能力”4個指標作為判斷標準。
此四指標模型主要包括3部分:指標模型、等級模型和評判方法。
1.1 自主水平指標模型
本文從“人和平臺的交互能力”、“態勢感知能力”、“環境適應能力”和“規劃決策能力”方面建立指標模型。但由于這四個指標及其子指標具有模糊性,因此,先為這些指標人為賦予數值,代表其對自主能力水平評判的影響程度,最低分是0分,最高分是100分。
1.1.1 人和平臺的交互能力
人和平臺的交互能力主要從以下4個一級子指標衡量無人平臺的自主能力。
1)操作者掌控時間。在無人平臺執行任務的過程中,操作者掌控時間越長,無人平臺自主能力越差。例如,操作者在無人平臺執行任務的過程中,有一半的時間都離不開操作者的調控,則此指標可以得到50分;若是執行任務的過程完全不需要操作者參與,可以得到100分。這個分數是人為確定的,因此有一定的主觀性,可以根據無人平臺當時的狀況修改分值。其他指標的分值確定也是根據當時它們對自主分級的影響程度。
2)操作者控制平臺數量。當多個無人平臺同時執行任務時,無人平臺的自主能力越強,則操作者可以同時控制的平臺數量越多。
3)操作者技術水平。操作者的學歷越低,無人平臺的自主能力越強。
4)操作者工作強度。此工作強度主要指操作者在掌控時間內是高強度的工作,還是輕松的監督工作。主要從操作者的疲勞程度劃分。
1.1.2 態勢感知能力
態勢感知能力主要從下面4個子指標反映平臺的自主能力水平。1)攻擊者種類,指來自海、陸、空的攻擊者種類。2)攻擊者攻擊頻率,指在同一時間內,能感知到并躲過的攻擊者的攻擊次數。3)攻擊者危險指數,即感知到的攻擊者的危險程度。4)感知危險時間,即感知到危險的時間長短。
1.1.3 環境適應能力
環境適應能力主要包括以下3個子指標。1)適應環境種類。無人平臺能適應的環境種類越多,則其自主能力越強。2)適應環境時間。無人平臺能適應當前環境的時間越短,越能體現其自主能力水平。3)適應環境范圍。無人平臺能感知到的自然環境狀況的范圍。范圍越廣,得分越高。
1.1.4 規劃決策能力
規劃決策能力是體現無人平臺自主能力水平的最重要的指標,主要解決無人平臺面對復雜環境(內部環境和外部環境)的不確定性,如何實現自主行為,自主決策,順利完成分配的任務。規劃決策能力主要從以下5個指標評判無人平臺的自主能力。
1)實時健康診斷。主要檢驗的是無人平臺執行任務時能對自身的狀況進行實時診斷的能力。實時健康診斷能力又從以下2個二級子指標影響平臺的自主能力。
①診斷時間。當故障出現的時候,診斷發現的時間越短,得到的分數就越高。
②診斷范圍。能診斷平臺內部環境范圍越廣,得到的分數越高。
2)故障自修復。當診斷出故障時,則要自主決策應采取何種方法修復故障,或在有故障的情況下如何完成任務。對故障自修復的評價也要從以下2個方面進行。
①修復時間。發現故障之后,越快修復,則自主能力越強,得到的分數越高。
②修復范圍。對于出現的故障,能修復的范圍越大,得分越高。
3)路徑規劃能力。主要檢驗的是無人平臺執行任務過程中自主根據突發狀況進行動態路徑規劃與重規劃等能力,判斷無人平臺自主完成任務時的實時性和抗干擾能力。路徑規劃能力主要從以下3個子指標評價。
①規劃時間。規劃的時間越長,表示其自主能力越低,相應的分數也就越低。
②規劃精度。將規劃好的路徑與操作者認為的最便捷的路徑進行對比,一致性越高,得分越高。
③對任務的影響度。當遇到突發狀況后,按照重新規劃好的路徑執行任務后,任務的完成度越高,則此指標得分越高。
4)任務規劃能力。主要檢驗的是無人平臺執行任務過程中,自主根據突發狀況進行任務規劃與重規劃等能力。主要從以下3個方面評價無人平臺的路徑規劃能力。
①規劃時間。在突發狀況下,重新規劃任務需要的時間越短,自主能力越強,賦予的分數越高。
②規劃精度。將規劃好的任務完成方式與操作者認為的最佳的方式進行對比,一致性越高,此指標得到的分數越高。
③任務成功率。突發狀況時,重新規劃后的任務方式是否能完成之前規劃的任務目標。
④抗干擾能力。無人平臺能應付的突發狀況的數量和種類。
5)團隊合作能力。此項指標里的合作對象主要是無人平臺。團隊合作能力主要從以下4個子指標評價一個無人平臺的自主能力。
①合作無人平臺數量。執行任務時,能同時合作的同類無人平臺數量越多,自主能力越強。
②合作無人平臺種類。合作的無人平臺的種類越多,體現其自主能力越強。
③任務難度。與其他無人平臺合作后,是否能完成以前單個平臺完成不了的任務。
④任務成功率。合作后,任務的成功率越高,則體現的自主能力越強。
1.2 自主水平等級模型
無人平臺總的發展趨勢是遙控—半自主—全自主[9],所以本文按照無人平臺的發展趨勢將無人平臺的等級模型簡單分為3級,分別是遙控式、半自主式和全自主式。根據百分制原則,每一級都有相應的分數范圍,對照無人平臺自主能力的最終分數找到其相應的等級。如表1所示。
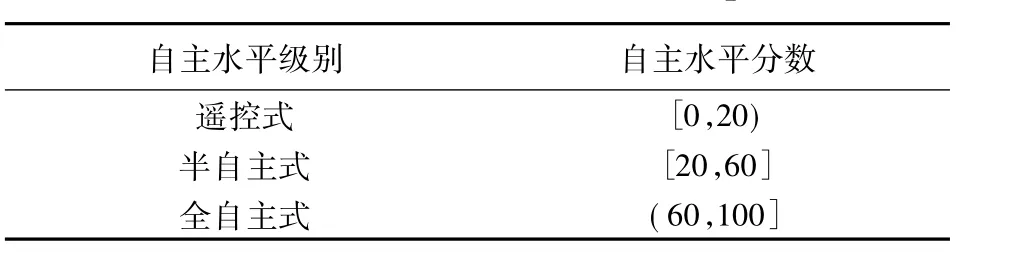
表1 無人平臺等級模型Table 1 The level model of unmanned platforms
1.3 自主水平評判方法

1.3.1 建立四指標的因素集U
“人和平臺交互”能力的一級評判指標U1=(操作者掌控時間,操作者控制平臺數量,操作者技術水平,操作者工作強度)=(u11,u12,u13,u14)。
1.3.2 確定評價集V
評價集V=(遙控式,半自主式,全自主式)=(v1,v2,v3),用分數向量 Q=(20,60,100)表示分值。
1.3.3 確定權重向量W
本文采用層次分析法對“人和平臺的交互能力”的子指標進行權重確定。
1)用兩兩比較法建立評判矩陣A。
因為“人和平臺的交互能力”中每個子指標賦予的分值都不同,用兩兩比較法建立“人和平臺的交互能力”中一級指標的評判矩陣A。
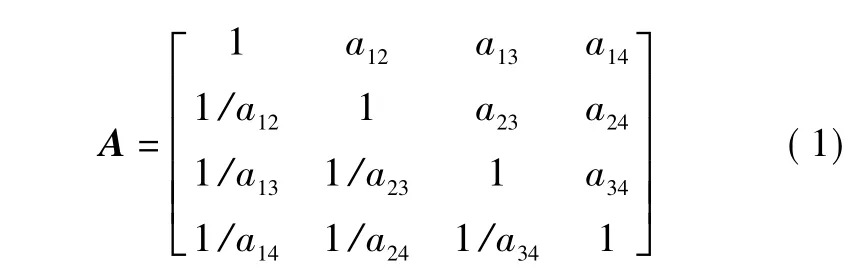
式中,aij表示第i個指標與第j個指標的相對重要性(根據每個指標賦予的分值大小進行比較)。aij的取值一般取正整數1~9(稱為標度)及其倒數。例如,當“操作者掌控時間u11”主觀給定的分數為50;“操作者掌控平臺數量u12”主觀給定分數25;“操作者技術水平u13”主觀給定分數35;“操作者工作強度u14”主觀給定分數45。兩兩比較可知,u11相比于u12明顯重要,取a12=5;u11相比于u13稍微重要,取a13=3;u11相比于u14稍稍重要,取 a14=2。
2)運用根法計算權重向量W。


當得到的權重向量不符合實際時,只要改變兩兩指標的相對重要性,得到新的評判矩陣即可算出新的權重向量。
1.3.4 確定評判隸屬矩陣R
將因素集 U=(u1,u2,u3,…,un)中的每個指標用評價集 V=(v1,v2,v3,…,vm)中的每個因素進行衡量,就會得到隸屬矩陣R。
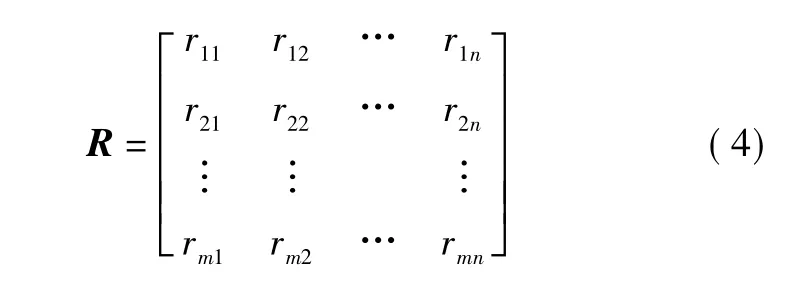
式中,rij表示第j個指標關于第i項評價因素的指標隸屬度。
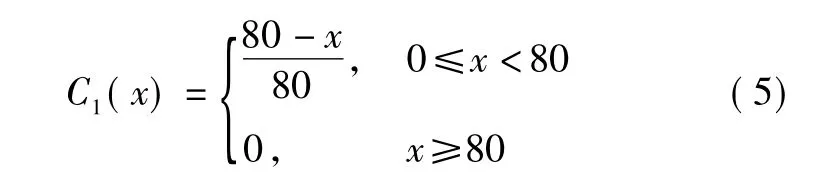
文中每個分級指標都主觀給定了一個百分制的分數。指標的分數不同,則指標隸屬于評價集中各等級的隸屬度也相應變化。因此,本文建立了關于分級指標分數x(x≤100)的隸屬度函數。
x隸屬于遙控式的隸屬度函數為
x隸屬于半自主式的隸屬度函數為
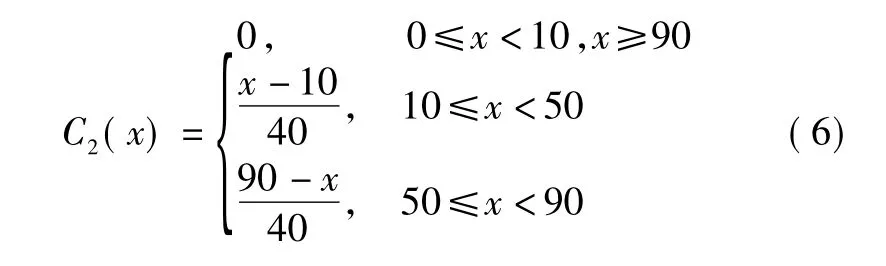
x隸屬于全自主式的隸屬度函數為

以“人和平臺的交互能力”為例,在構造其比較評判矩陣時,一級指標已經給定分值。如,“操作者掌控時間 u11”主觀給定的分數為50,則 r11=C1(x)=C1(50)=0.375表示當一級指標“操作者掌控時間u11”主觀給定的分數為50時,隸屬于遙控式等級的隸屬度為0.375。r12=C2(x)=C2(50)=1表示當一級指標“操作者掌控時間u11”主觀給定的分數為50時,隸屬于半自主式等級的隸屬度為1。r13=C3(x)=C3(50)=0.375表示當一級指標“操作者掌控時間u11”主觀給定的分數為50時,隸屬于全自主式等級的隸屬度為0.375。同理可得到其他3類指標的隸屬度。若是得到的隸屬度情況不符合實際,則只要改變每個指標賦予的分值就可得到新的隸屬矩陣。
1.3.5 得到模糊決策集B
進行U到V的模糊變換,即對權重指標向量W和評判隸屬矩陣R進行合成運算[10],得到V上的模糊子集B。

“人和平臺的交互能力”的最終分數為

同理,按照此計算過程可得到其他3個指標的最終量化分值。
2 實例應用計算
本文中實例驗證時選定的無人平臺是“全球鷹”無人機、國內自主研制的“紅旗HQ3”無人車和美國“斯巴達勇士”無人船。
以“全球鷹”的計算過程為例,假設“全球鷹”的四維指標的賦值如表2所示。
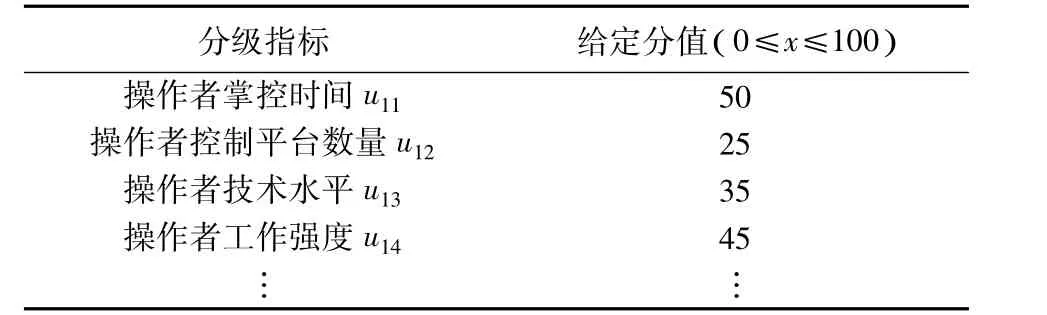
表2 “全球鷹”的各指標給定分值Table 2 The score of each indicator of Global Hawk
根據前面的計算過程,得到“全球鷹”的“人和平臺交互能力”為32.85分,“態勢感知能力”為57.22分,“環境適應能力”為47.15分,“規劃決策能力”為24.47分,其最終的自主能力為40.15分。
在美國“無人機路線圖中”,“全球鷹”的自主等級為2~3級,證明“全球鷹”在自主能力方面已經具有了適應故障和飛行條件的水平。但此方法只說明了“全球鷹”具有什么樣的自主能力,而沒有說明具備這樣的自主能力需要的條件及其量化方法。本文中的模型不但評判出了“全球鷹”具備這樣的自主能力,也解釋了具備這樣的自主能力的原因和量化的方法,更容易運用到實際中判斷無人平臺的自主等級。
“紅旗HQ3”無人車的“人和平臺交互能力”為85.32分,“態勢感知能力”為67.23分,“環境適應能力”為50.17分,“規劃決策能力”為 78.44分,其最終的自主能力為70.29分。
美國“斯巴達勇士”無人船的“人和平臺交互能力”為5.12分,“態勢感知能力”為20.44分,“環境適應能力”為27.58分,“規劃決策能力”為9.20分,其最終的自主能力為15.56分。
參照表1中的等級模型,可知“全球鷹”的最終分數屬于半自主式,且處于半自主式中等范圍。“紅旗HQ3”的分數屬于全自主式中等偏下的范圍,而“斯巴達勇士”的分數表明它的自主能力還完全屬于遙控式水平。
為了直觀地看到這四指標模型對無人平臺自主能力水平的影響程度,本文選擇以金字塔圖的形式將四指標的分數標示出來。如圖1所示。
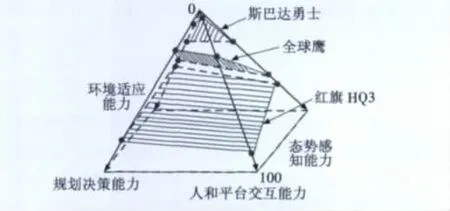
圖1 “全球鷹”、“紅旗HQ3”和“斯巴達勇士”的自主等級金字塔圖Fig.1 Autonomy level pyramid of Global Hawk,Red Flag HQ3 and Spartan Scout
3 結束語
本文建立了一個評判無人平臺自主能力等級的四指標模型,此模型不是單純地用傳感器等裝置識別出周圍的環境狀況,而是根據當前“人和平臺的交互能力”、“態勢感知能力”、“環境適應能力”和“規劃決策能力”這四維指標進行判斷,更接近對無人平臺本身自主能力的判斷。其中的4類指標也可以進一步細化為二級、三級。此模型主要適用于單個無人平臺執行任務時的自主能力水平的判斷,對多個無人平臺合作時的自主能力水平的判斷不是十分適用。
[1] 楊哲,張汝波.無人系統自主等級模糊評價方法[J].小型微型計算機系統,2009,10(10):43-48.
[2] CLOUGH B T.How the heck do you determine a UAV's autonomy anyway[C]//Proceedings of the Performance Metrics for Intelligent Systems Workshop,Gaithersburg,Maryland,USA,2002:12-20.
[3] CLEARY M,ABRAMSON M,DAMS M B,et al.Metrics for embedded collaborative intelligent systems[R].Charles Stark Draper Laboratory,Inc,2000.
[4] HUANG Huimin,PAVEK K,ALBUS J,et al.A framework for autonomy levels for unmanned systems(ALFUS)[C]//Proceedings of the AUVSI's Unmanned Systems,North America,June 2005,Ba-ltimore,MD,2005:327-336.
[5] HUANG Huimin,PAVEK K,ALBUS J,et al.Autonomy levels for unmanned systems(ALFUS)framework:An update[C]//Proceedings of SPIE Defense and Security Symposium,Orlando,Florida,2005:439-448.
[6] HUANG Huimin,MESSINA E,ALBUS J.Toward a gene ric model for autonomy levels for unmanned systems(ALFUS)[C]//Proceedings of the Performance Metrics for Intelligent Systems Workshop,Gaithersburg,Maryland,2003:237-243.
[7] HUANG Huimin,ALBUS J,MESSINA E,et al.Autonomy level specification for intelligent autonomous vehicles:Interim progress report[C]//PerMIS Workshop,Gaithersburg,MD,2003:223-227.
[8] HUANG Huimin,ALBUS J,MESSINA E,et al.Specifying autonomy levels for unmanned systems:Interim report[C]//Proceedings of SPIE Defense and Security Symposium,Bellingham,WA,2004:386-397.
[9] 高勁松,鄒慶元,陳哨東.無人機自主性概念研究[J].電光與控制,2007,14(5):58-61.
[10] 駱正山,陳紅玲,鄭楠.多因素模糊綜合評判模型的風險投資項目評估應用研究[J].西安科技大學學報,2010,30(3):32-35.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
發明與創新(2022年30期)2022-10-03 08:40:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
人大建設(2018年6期)2018-08-16 07:23:10
領導決策信息(2018年50期)2018-02-22 06:17:16
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
