利用改進相頻檢測器實現大頻偏M-PSK信號的快速載波同步
2012-08-08 09:58:00邱樂德
電訊技術 2012年12期
徐 烽,邱樂德,王 宇
(1.中國空間技術研究院西安分院,西安 710100;2.中國空間技術研究院,北京 100094)
1 引 言
衛星通信信道是典型的非線性信道[1],會引起信號的非線性失真,因此對通信調制方式有一定要求,而M元相移鍵控(M-ary Phase Shift Keying,MPSK)[2]調制信號具有恒包絡特性,非常適合在非線性衛星信道中使用,因此被廣泛用于衛星通信,例如QPSK是目前衛星通信最常用的調制方式,而較高速率數據傳輸的衛星通信中則一般采用8-PSK調制。
衛星通信的數字接收機經常要在較大的頻偏下實現載波同步,頻偏主要來源于收發端振蕩器、混頻器、低噪聲模塊(Low Noise Block,LNB)等的振蕩頻率不穩定,以及由星-地相對運動引起的Doppler頻移。在頻偏較大時,使用鎖相環(Phase-Lock Loop,PLL)實現載波同步會面臨較長的捕獲時間,甚至無法實現對頻偏的捕獲。為此,一般采用輔助捕獲的技術擴大PLL的頻偏捕獲范圍。常見的輔助捕獲技術[3]包括掃頻、環路濾波器切換、輔助鑒頻器、相頻檢測器(Phase and Frequency Detector,PFD)。其中,PFD[4]只對傳統鑒相器(Phase Detector,PD)做了少量修改,就大大增加了PLL捕獲范圍,是較大頻偏下實現載波同步的一種好方法,在數字無線通信中被廣泛采用。
由于PFD能以很小的代價換取捕獲性能的明顯提升,在文獻[4]之后,陸續有人對基于PFD的載波同步技術進行了研究。文獻[5]針對QAM系統,對比分析了使用鑒相器(PD)和相頻檢測器(PFD)做載波捕獲的差別,驗證了PFD對載波捕獲性能的提高。文獻[6]針對高階QAM信號提出的載波恢復環中,采用了類似PFD的“跟蹤保持”算法實現對頻偏方向的估計。文獻[7]將PFD的“跟蹤保持”與精簡星座鎖相環(RC-PLL)相結合,提高了對高階QAM信號相偏和頻偏的檢測能力。文獻[8]將PD和PFD結合,實現了對高階QAM信號的快速捕獲和高性能跟蹤。Lee等人[9]在將PD和PFD結合的基礎上,又增加了一個初始頻偏估計模塊,使捕獲速度最大能提高6倍。Ma等人[10]基于CORDIC算法和PFD設計了一種高階QAM載波同步環,跟蹤環路PDF、PDS和DDS 3種模式運行,達到了快速捕獲和減小穩態抖動的效果。
為在較大頻偏下實現對M-PSK信號的快速捕獲,本文研究基于PFD的PLL的載波同步方法,提出一種PFD的改進方法,可以實現更快速的頻率捕獲。
2 信號模型
假設理想的符號同步和增益控制,載波跟蹤模塊要處理的是匹配濾波器輸出的符號速率的樣值:

其中,ck是M-PSK復信號,F為頻偏,T為符號周期,θ0為初始相偏,nk是復高斯白噪聲序列。本文符號ck的調制以8-PSK為例,其調制星座如圖1所示。
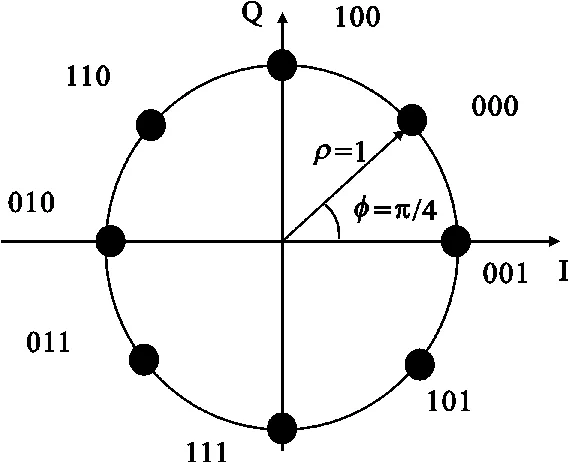
圖1 8-PSK星座圖Fig.1 8-PSK constellation
3 基本原理
載波同步環基于一般的數字鎖相環(Digital PLL,DPLL)實現,如圖2所示。主要改動是在PD之后增加一個“跟蹤保持”模塊,以實現PFD的功能。另外,“鎖定檢測”模塊根據捕獲是否成功,調節環路濾波參數,以達到加快捕獲或者抑制噪聲的效果。
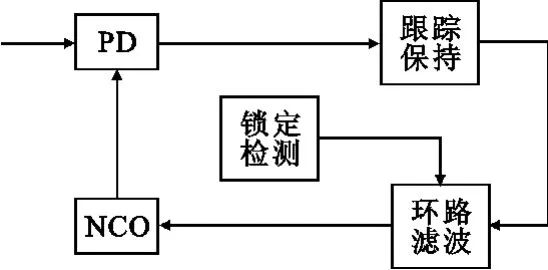
圖2 載波同步環結構示意圖Fig.2 Carrier recovery loop structure
3.1 PFD的基本原理
Sari和Moridi[4]提出的PDF,在傳統 PD的基礎上只增加了少量電路,就大大增強了載波跟蹤環的頻率捕獲性能。
如圖3所示,細虛線為一個傳統正弦鑒相特性的PD鑒相曲線。在穩態時,相位誤差在穩定平衡點附近振蕩。由于PLL中環路濾波的存在,鎖相環的振蕩器頻率在幾個符號之內可以近似認為不變。在捕獲過程中,由于存在頻偏,相位差會以正比頻偏的速率發生變化。假設頻偏為F,載波初始相位為θ0,則隨時間變化的載波相位為 θ(t)=2πFt+θ0。這樣頻偏較大時,PD輸出的就是一個具有零直流分量的正弦信號,不能提供頻偏極性的信息,因此PLL無法控制其VCO的振蕩頻率捕獲頻偏;而頻偏較小時,使用這樣的PD的PLL對頻偏的捕獲速度也是比較慢的。
為了使PD輸出能在有頻偏的情況下提供頻偏極性的信息,Sari和Moridi[4]在傳統PD之后加入一個跟蹤保持電路,就構成了PFD。當PD鑒相結果處于穩定平衡點附近的指定范圍內時,PFD為跟蹤狀態,其輸出就是PD的鑒相結果;而當PD鑒相結果超出指定范圍內時,PFD就變為保持狀態,輸出值是上一次PFD的輸出。例如,在頻偏F>0時,鑒相結果會隨著時間以圖3中向右的趨勢變化,從穩定平衡點附近逐漸增大,在超出限定范圍后,PFD變為保持狀態。由于“保持”段的存在,PFD的輸出中就包含了與頻偏極性相同的直流分量,因此可以控制VCO提高其振蕩頻率,從而實現對頻偏的捕獲。顯然,在頻偏F<0時,鑒相結果會隨著時間以圖3中向左的趨勢變化,由“跟蹤”變為“保持”時,PFD將輸出負直流分量,同樣能實現對頻偏的捕獲。
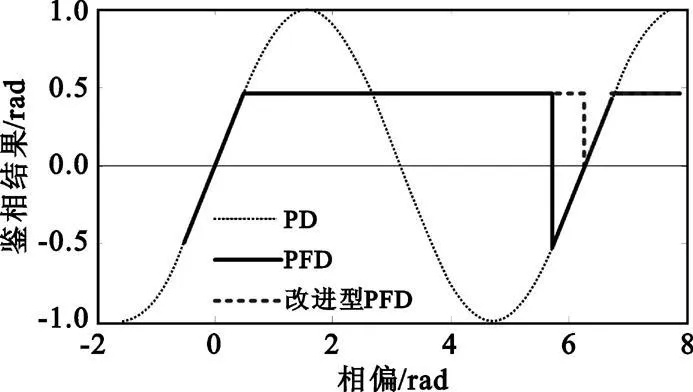
圖3 PFD與改進型PFD(正弦鑒相特性)Fig.3 PFD and modified PFD(sine S-curve)
3.2 改進型PFD
從圖3(粗實線)可以看出,頻偏較大時,上面的PFD在“保持”一段時間后,還會進入到指定的“跟蹤”范圍,這時PFD輸出將跳變為極性相反的輸出。而我們知道,這是由于頻偏過大導致的,這時正確的輸出仍然應該是與頻偏極性相同的,或者說,與跳變前“保持”的極性相同的值。因此我們對PFD做如下修改:一是由“跟蹤”變為“保持”的條件不變,即鑒相結果超出了“跟蹤”范圍;二是由“保持”變為“跟蹤”的條件,除了要求PD鑒相結果進入“跟蹤”區間,還要求鑒相結果的極性與當前“保持”的極性相同。這樣改動后,就將上述的相反極性跳變階段也變成了“保持”段(見圖3粗虛線),因此PFD最終輸出的直流分量更大,從而可以實現對大頻偏更快的捕獲。
對M-PSK信號,有不需要定時信息的載波同步方法[11],這里只考慮更常見的符號定時信息已知的情況。M-PSK信號常用的鑒相方法可分為兩類[12]:NDA類和DD類。針對上面的載波跟蹤結構,我們考察將改進型PFD用于M-PSK信號常見的兩種PD:V&V法[13](典型的NDA法)和判決導引(Decision Directed,DD)法[14]。
(1)V&V法
V&V法是一種非數據輔助的(Non-Data Aided,NDA)鑒相方法,其相位誤差計算式為

適當選擇參數 μ可以起到減小抖動的作用,參數m(等于調制階數)則是為了消除信號中的調制信息。當 μ=m時,V&V法就變成了冪律法。
V&V的鑒相特性曲線是正弦型的(如圖3中的細虛線),由于鑒相結果位于“跟蹤”范圍內時,除了可能在穩定平衡點附近,也有可能是位于某個不穩定平衡點附近。只有在穩定平衡點附近的“跟蹤”范圍內時,PFD才應該變為“跟蹤”狀態;在不穩定平衡點附近的“跟蹤”范圍內時,PFD應該使用“保持”而不是“跟蹤”狀態,所以需要一個與正弦PD正交的余弦PD支路輔助判斷(詳見文獻[4]的介紹)。
(2)DD法
在信噪比較高時,由于判決結果可靠度高,采用DD鑒相可以獲得更好的性能。DD鑒相的相位誤差計算式為

DD法具有鋸齒型的鑒相特性曲線(如圖4所示),因此可以不需要輔助支路進行“跟蹤”區間的判斷,而是直接在PD后接入一個跟蹤保持電路即可實現PFD的功能。而且,對于具有鋸齒鑒相特性的PD,改進型的PFD比一般PFD增加的“保持”區間比例更大,因此,對大頻偏捕獲性能的提高會更明顯。
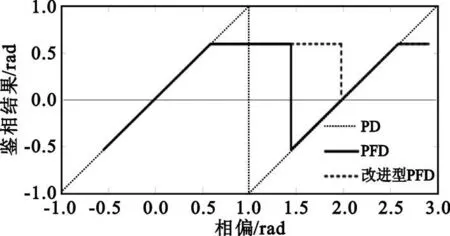
圖4 PFD與改進型PFD(鋸齒鑒相特性)Fig.4 PFD and modified PFD(sawtooth S-curve)
3.3 鎖定檢測與參數切換
由于大的鑒相增益和環路帶寬有助于快速捕獲,而小鑒相增益和環路帶寬則有助于抑制噪聲、降低PLL相位抖動方差,因此我們設計環路濾波器使用兩套參數,在捕獲階段采用大參數,并使用鎖定檢測模塊監視PLL的鎖定狀態,一旦實現鎖定,則切換為小參數,從而實現更好的跟蹤性能。
4 捕獲性能
下面通過仿真驗證對比采用傳統PD、PFD和改進型PFD的載波環對頻偏的捕獲性能。我們使用衛星數傳中常見的參數對幾種鑒相方法進行仿真,仿真過程使用的具體參數設置如下(這里主要關注捕獲,因此使用了較大的環路帶寬):調制方式8PSK,幀長度為5 000符號,環路歸一化帶寬BLT=0.02。
圖5給出了不同歸一化頻偏下DD-PLL對頻偏捕獲的對比情況。
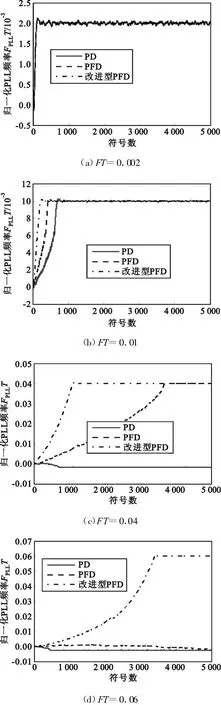
圖5 使用PD、PFD、改進型PFD的DD-PLL頻響曲線Fig.5 Frequency response of DD-PLL with PD,PFD,and modified PFD
下面對圖5進行分析。
(1)在頻偏較小(圖5(a),歸一化頻偏 FT=0.002)時,采用PD和PFD、改進型PFD的PLL具有幾乎完全相同的頻率響應曲線,這是因為較小的頻偏使得PD的鑒相結果基本處于“跟蹤”區,而“保持”區的設置基本不起作用。
(2)隨著頻偏的增大,PFD和改進型PFD對頻偏捕獲的能力逐漸顯示出來。在FT=0.01(圖5(b))時,使用普通PD的PLL要在超過800符號后才能實現對頻偏的捕獲,而PFD只需要約500符號就可以實現頻偏捕獲,改進型PFD比PFD性能更好,約需要300符號就實現了頻偏捕獲。這說明跟蹤保持裝置的“保持”功能起到了明顯的作用。更多的仿真發現,在FT大于0.005之后,兩者對頻偏捕獲的增強開始顯現出來。
(3)當 FT進一步增大到0.04(圖5(c))時,使用普通PD的PLL已經無法在仿真長度(5 000個符號)內實現頻率捕獲;使用PFD的PLL卻可在約3 500符號實現捕獲;而使用改進型PFD的PLL這時展示出了明顯提高的捕獲性能,在大約1 200個符號內就實現了捕獲。這是因為較大的頻偏使得新增的“保持”段出現的概率更大了,因此其提供的直流增益在頻率捕獲的過程中發揮了更明顯的作用。
(4)在 FT增大到0.06(圖 5(d))時,使用PD和PFD的PLL都無法在仿真長度內實現頻率捕獲,而使用改進型PFD的PLL仍然在3 700符號以內實現了捕獲,展示出了對大頻偏的強大捕獲性能。經多次仿真驗證,在本文的參數設置情況下,改進型PFD的捕獲范圍約比傳統PFD提升25%。
通過上面的對比,我們可以得出以下基本結論:
(1)在頻偏較小時,PD、PFD和改進型PFD的作用基本相同;
(2)在頻偏較大時,PFD和改進型PFD才能發揮提高頻偏捕獲性能的作用;
(3)改進型PFD比PFD具有更大的捕獲范圍和更快的捕獲速度。
另外,在對使用V&V法鑒相的PLL仿真對比后發現(限于篇幅,不再給出仿真結果圖),PLL的捕獲范圍和捕獲速度都比DD-PLL低一些,但PFD和改進型PFD同樣能提高PLL對較大頻偏的捕獲性能;在頻偏較大時,改進型PFD比PFD的捕獲性能也要好一些。
5 結束語
本文對基于PFD的DPLL稍作修改,通過延長PFD的“保持”區間,提高了大頻偏下PFD輸出的直流分量,從而實現了對更大載波頻偏的快速捕獲。仿真結果證明,與使用傳統PFD的DPLL相比,使用修改后的PFD的DPLL不論是頻偏捕獲范圍還是捕獲速度,都有了明顯的提高。在歸一化頻偏大于0.005時,傳統PFD與改進的PFD對頻偏捕獲速度的增強作用開始顯現出來,且改進的PFD比PFD的捕獲更快;在歸一化頻偏大于0.06時,在傳統PFD無法實現捕獲的情況下,改進的PFD仍然能實現對頻偏的捕獲,驗證了改進型PFD對DPLL頻偏捕獲范圍的提高(本文參數設置下提高約25%)。本文使用仿真方法驗證了改進型PFD的性能,應用到實際工程中的效果及可能遇到的問題還有待驗證。
[1] De Gaudenzi R,Fabregas A G I,Martinez A,et al.High power and spectral efficiency coded digitalmodulation schemes for nonlinear satellite channels[C]//Proceedings of the 7th International ESA Workshop on Digital Signal Processing Techniques for Space Communications.Sesimbra,Portugal:[s.n.],2001.
[2] Proakis J G.DigitalCommunications[M].4th ed.New York:McGraw-Hill,2001.
[3] Gardner F M.Phaselock Techniques[M].3rd ed.New York:John Wiley&Sons,2005.
[4] Sari H,Moridi S.New Phase andFrequency Detectors for Carrier Recovery in PSK and QAM Systems[J].IEEE Transactions on Communications,1988,COM-36(9):1035-1043.
[5] Benani A M,GagnonF.Comparison of carrier recovery techniques in M-QAM digital communication systems[C]//Proceedings of 2000 Canadian Conference on Electrical and Computer Engineering.Halifax,NS:IEEE,2000:73-77.
[6] Ouyang Y,Wang C.A new carrier recovery loop for high-order quadrature amplitude modulation[C]//Proceedings of 2002 Global Telecommunications Conference.Taipei:IEEE,2002:478-482.
[7] Park C,Lee J,Kim Y.Modified Reduced Constellation PLL for Higher Order QAM[C]//Proceedings of 2007 IEEE International Symposium on Circuits and Systems.New Orleans,LA:IEEE,2007:2144-2147.
[8] Gagnon G,Choquette F,Belzile J,et al.A simple and fast carrier recovery algorithm for high-order QAM[J].IEEE Communications Letters,2005,9(10):918-920.
[9] Lee C S,Lee E D,Ahn J.Fast frequency acquisition algorithm for carrier recovery for high-order QAM[J].IEEE Electronics Letters,2008,44(2):143-144.
[10] Ma Siqiang,Chen Yong'en.Implementation and Design of Carrier Recovery Loop for High Order QAM Signals[C]//Proceedings of 20117thInternationalConference onWireless Communications,Networking and Mobile Computing.Wuhan:IEEE,2011:1-4.
[11] Wang Hua,Yan Chaoxing,Wu Nan,et al.Maximum Likelihood Clockless Feedback Phase Recovery for MPSK Signals[C]//Proceedings of 2010 IEEE 72nd Vehicular Technology Conference Fall.Ottawa,ON:IEEE,2010:1-5.
[12] Linn Y.Robust M-PSK phase detectors for carrier synchronization PLLs in coherent receivers:theory and simulations[J].IEEE Transactions on Communications,2009,57(6):1794-1805.
[13] Viterbi A J,ViterbiA M.Nonlinear estimation of PSK-modulated carrier phase with application to burst digital transmission[J].IEEE Transactions on Information Theory,1983,29(4):543-551.
[14] Mengali U,Andrea A N D.Synchronization Techniques for Digital Receivers[M].New York:Plenum Press,1997.
猜你喜歡
幼兒園(2021年6期)2021-07-28 07:42:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
中國生殖健康(2019年3期)2019-02-01 06:12:26
小學生導刊(2017年13期)2017-06-15 20:29:38
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
哈爾濱師范大學自然科學學報(2015年1期)2015-04-19 06:55:26
天津科技大學學報(2015年4期)2015-04-16 04:55:11