具有閉環(huán)跟蹤的連續(xù)波雷達(dá)動(dòng)態(tài)目標(biāo)模擬器設(shè)計(jì)
2012-09-28 03:22:56鐘水和周家珍
電訊技術(shù) 2012年12期
關(guān)鍵詞:信號(hào)
鐘水和,張 路,周家珍
(解放軍63623部隊(duì),甘肅 酒泉732750)
1 引 言
連續(xù)波雷達(dá)的發(fā)射機(jī)發(fā)射功率較小,需要在箭上應(yīng)答機(jī)的配合下才能完成目標(biāo)跟蹤,一般只有在航天任務(wù)和戰(zhàn)略任務(wù)中安裝應(yīng)答機(jī),開(kāi)展任務(wù)的針對(duì)性訓(xùn)練較為困難。隨著計(jì)算機(jī)和微波器件的迅速發(fā)展,雷達(dá)目標(biāo)模擬器[1-5]越來(lái)越受到大家的重視。它滿足測(cè)控系統(tǒng)的聯(lián)調(diào)聯(lián)試[6]、操作人員的針對(duì)性訓(xùn)練[7]和雷達(dá)跟蹤性能的測(cè)試[8]的需要,節(jié)省了大量的訓(xùn)練經(jīng)費(fèi)和測(cè)試時(shí)間。
動(dòng)態(tài)目標(biāo)模擬器是針對(duì)于單通道連續(xù)波測(cè)速雷達(dá)而設(shè)計(jì)的,它為人員針對(duì)性訓(xùn)練和設(shè)備功能檢查提供具有實(shí)戰(zhàn)特性的射頻信號(hào)。為了準(zhǔn)確模擬實(shí)戰(zhàn)和測(cè)試設(shè)備的接收靈敏度、測(cè)速精度等,要求動(dòng)態(tài)目標(biāo)模擬器能夠模擬目標(biāo)在飛行過(guò)程中不同速度下的多普勒頻率、不同位置下的下行射頻信號(hào)的強(qiáng)度以及目標(biāo)在天線波束內(nèi)與電軸的相對(duì)角度。
2 閉環(huán)跟蹤的實(shí)現(xiàn)原理
連續(xù)波雷達(dá)的角誤差解調(diào)采用單脈沖跟蹤體制,它利用圓波導(dǎo)管的基本模TE11作為和模(基本模),用TM01模作為差模(誤差模),實(shí)現(xiàn)同時(shí)波瓣制跟蹤。
當(dāng)目標(biāo)偏離天線電軸的角度 φ很小時(shí),從天線饋源所激勵(lì)的和信號(hào)和差信號(hào)的表達(dá)式如下所示:
其中,ωc為載波信號(hào)角頻率,其包含有目標(biāo)信號(hào)的多普勒值fd;η為跟蹤坐標(biāo)系目標(biāo)在天線平面的投影與水平軸的夾角;μ為天線歸一化差斜率。
天線饋源所激勵(lì)的和信號(hào)和經(jīng)sin(Ψ t)調(diào)制的差信號(hào)被放大,并與本地正交相干載波進(jìn)行混頻、低通濾波后求出和信號(hào)的頻率 ωc,即得到目標(biāo)的多普勒頻偏。輸出的信號(hào)經(jīng)過(guò)本地調(diào)制信號(hào)sin(Ψ t)混頻濾波后得到方位誤差電壓和俯仰誤差電壓。
式中,φ為目標(biāo)偏離天線波瓣的誤差角度。
接收機(jī)得到的方位俯仰誤差電壓送入伺服控制器ACU,經(jīng)校正后送至ADU,由ADU驅(qū)動(dòng)天線,使天線電軸對(duì)準(zhǔn)目標(biāo),完成閉環(huán)跟蹤。
3 動(dòng)態(tài)目標(biāo)模擬器的實(shí)現(xiàn)
箭載應(yīng)答機(jī)的微波信號(hào)經(jīng)天線饋源激勵(lì)后產(chǎn)生和信號(hào)和差信號(hào)(簡(jiǎn)稱和差信號(hào)),動(dòng)態(tài)目標(biāo)模擬器實(shí)現(xiàn)了這兩個(gè)信號(hào)的射頻模擬,近似代替應(yīng)答機(jī),實(shí)現(xiàn)測(cè)速和測(cè)角等多項(xiàng)性能的檢驗(yàn)[9]。
和差信號(hào)的幅度(A(r))、頻率(fd)和相位(φ,η)均與目標(biāo)航跡、天線坐標(biāo)以及電軸的指向密切相關(guān)。為明確其相對(duì)關(guān)系,建立目標(biāo)跟蹤坐標(biāo)系。以天線饋源中心作為坐標(biāo)原點(diǎn)O,饋源口面作為y-z平面,z軸在水平面上,y軸與z軸垂直,x軸過(guò)O點(diǎn),與 y軸、z軸構(gòu)成右手坐標(biāo)系,即為饋源波瓣方向。
目標(biāo)偏離天線饋源波瓣方向Ox的角度為φ,即為射線OM與射線OM″的夾角;目標(biāo)偏離電軸的距離為 MM″,MM″在y-z平面的投影為OM′,OM′與x軸的夾角為 η,即為射線 OM′與射線OM 的夾角。目標(biāo)M在跟蹤坐標(biāo)系中的位置如圖1所示。

圖1 動(dòng)態(tài)目標(biāo)M在跟蹤坐標(biāo)系中的幾何示意圖Fig.1Geometry of the dynamic target in track coordinate
3.1 幅度模擬
連續(xù)波雷達(dá)接收應(yīng)答機(jī)下行信號(hào)的幅度主要由目標(biāo)與天線的相對(duì)位置決定。應(yīng)答機(jī)的發(fā)射功率和安裝位置、微波信號(hào)的大氣吸收、火箭的火焰衰減等均會(huì)影響連續(xù)波雷達(dá)的接收信號(hào)幅度。
根據(jù)目標(biāo)航跡可以確定某一時(shí)刻目標(biāo)與天線的相對(duì)距離R,按照微波信號(hào)的自由空間衰減規(guī)律得到衰減值,其中λ為射頻信號(hào)波長(zhǎng)。即和信號(hào)幅度如下所示:

其中,P為設(shè)備場(chǎng)放入口處接收電平,G1為箭上應(yīng)答機(jī)的EIRP;G2為接收天線的增益;P1為射頻信號(hào)的自由空間衰減;P2為天線極化衰減;P3為大氣吸收;P4為天線饋源到接收機(jī)場(chǎng)放入口處的波導(dǎo)饋線衰減;P5為其他引起的信號(hào)衰減,即修正系數(shù)。從和差信號(hào)公式中可以發(fā)現(xiàn),差信號(hào)電平與和信號(hào)電平成比例關(guān)系,比例系數(shù)為u×φ。由于箭上應(yīng)答機(jī)天線的安裝位置及其方向圖的差異,各站布放地點(diǎn)不同導(dǎo)致同一個(gè)時(shí)刻各站接收電平出現(xiàn)差異,即上式中的P5,此衰減采用標(biāo)定的方法來(lái)實(shí)現(xiàn)。
3.2 多普勒頻率模擬
根據(jù)引導(dǎo)數(shù)據(jù)預(yù)知目標(biāo)M在地心系下的位置、速度(x,y,z,x,y,z)、測(cè)站站址(xc,yc,zc),則目標(biāo)與測(cè)站的空間距離R為

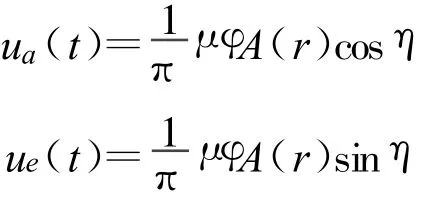
令在t、t+Δt、t+2Δt時(shí)刻,目標(biāo)與發(fā)站的距離分別為 RT1、RT2、RT3,目標(biāo)與測(cè)站的距離分別為RR1、RR2、RR3。如圖 2 所示。
圖2 目標(biāo)多普勒模擬示意圖Fig.2 Sketch map for target Doppler simulation
按照多普勒頻率與徑向速度的比例關(guān)系

式中,fd為目標(biāo)多普勒,fr為接收載波頻率,c為光速,V為目標(biāo)徑向速度,則得到t+Δt時(shí)刻目標(biāo)多普勒參數(shù)如下所示:

t+2Δt時(shí)刻目標(biāo)多普勒參數(shù)如下所示:

即可得到各時(shí)刻點(diǎn)測(cè)站的目標(biāo)多普勒頻偏,實(shí)現(xiàn)對(duì)動(dòng)態(tài)目標(biāo)的速度模擬。
3.3 相位模擬
根據(jù)引導(dǎo)數(shù)據(jù)預(yù)知目標(biāo)M在地心系下的位置、速度(x,y,z,x,y,z)、天線當(dāng)前方位、俯仰角度A、E和雷達(dá)站址(L,B,H)。按照上式中的和差信號(hào)公式,只需要信號(hào)幅度 A、總誤差角 φ和天線與水平軸夾角η。信號(hào)幅度A(r)與目標(biāo)與測(cè)站的距離、箭上應(yīng)答機(jī)的安裝位置和天線的極化衰減等相關(guān),角度誤差 φ和η與天線波瓣方向和目標(biāo)位置相關(guān)。
按照和差信號(hào)公式,和差信號(hào)的相位主要由目標(biāo)與天線電軸的角度誤差 φ和η決定。角度誤差φ和η的估計(jì)主要涉及到目標(biāo)地心系理論彈道(x,y,z)旋轉(zhuǎn)變換至連續(xù)波雷達(dá)測(cè)站的測(cè)量系理論彈道(x0,y0,z0)上,而后再經(jīng)過(guò)旋轉(zhuǎn)變換到測(cè)站天線的跟蹤坐標(biāo)系彈道(x′,y′,z′),而后按照角度誤差的定義得到 φ和η。
測(cè)量坐標(biāo)系是以接收天線回轉(zhuǎn)中心為坐標(biāo)原點(diǎn)O,Y軸為過(guò)O點(diǎn)的垂線方向,向上為正;X軸為過(guò)O點(diǎn)的水平面內(nèi)指向天文北;Z軸為過(guò)O點(diǎn),與X軸、Y軸成右手直角坐標(biāo)系。水平面即為X-Z平面。假設(shè)某個(gè)時(shí)刻,目標(biāo)M在測(cè)量坐標(biāo)系中的位置如圖3所示,M在測(cè)量坐標(biāo)系水平面上的投影為Q,則此時(shí)方位角度 A為射線OQ與X軸的夾角,俯仰角度E為射線OM與射線OQ的夾角。
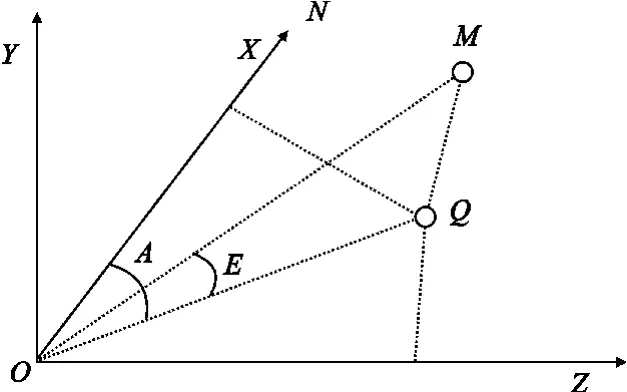
圖3 目標(biāo)M在測(cè)量坐標(biāo)系中的位置示意圖Fig.3 Sketch map for target in measure coordinate
測(cè)量坐標(biāo)系向跟蹤坐標(biāo)系的轉(zhuǎn)換為,測(cè)量坐標(biāo)系繞Y軸順時(shí)鐘旋轉(zhuǎn)A角,而后繞Z軸逆時(shí)鐘旋轉(zhuǎn)E角即為跟蹤坐標(biāo)系。則測(cè)量坐標(biāo)系中的(x0,y0,z0)向跟蹤坐標(biāo)系中的(x′,y′,z′)的變換矩陣P 為

在跟蹤坐標(biāo)系下,假設(shè)目標(biāo)M 的位置為(x′,y′,z′),則目標(biāo) M 在天線波瓣方向(即 x軸)的投影MM″的坐標(biāo)為(x′,0,0),目標(biāo)M在跟蹤坐標(biāo)系中y-z平面的投影OM′的坐標(biāo)為(0,y′,z′),即可得到
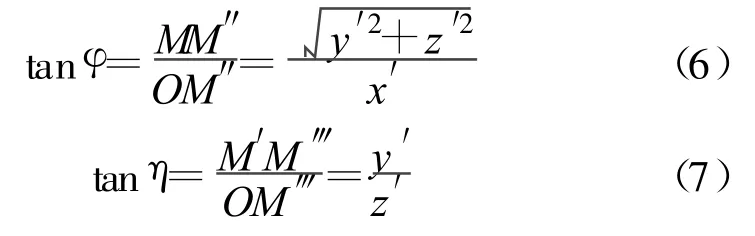
由于反正切的輸出角度為-90°~90°,而 φ的角度方位為 0°~ 90°,η的角度方位為 0°~ 360°,按照如下公式需要進(jìn)行修正:

綜合來(lái)看,動(dòng)態(tài)目標(biāo)模擬器模擬的射頻信號(hào)流程圖如圖4所示。

圖4 模擬信號(hào)各參數(shù)產(chǎn)生流程圖Fig.4 Flow chart for the generation of the simulate signal′s parameters
硬件采用研華CPCI工控機(jī),采用2U標(biāo)準(zhǔn)的CPCI板卡結(jié)構(gòu)。
信號(hào)處理部分采用美國(guó) TI公司的TMS320C6416,完成射頻和差信號(hào)幅度、多普勒頻率和初始相位的計(jì)算,其具有600 MHz的內(nèi)部工作時(shí)鐘,能夠滿足200 Hz數(shù)據(jù)流的計(jì)算和與監(jiān)控客戶端及對(duì)其他處理模塊的數(shù)據(jù)交流要求。采用Xilinx公司的大規(guī)模FPGA芯片XC4VLX100,采用DDS算法(1024點(diǎn)查表)完成射頻和差信號(hào)和噪聲信號(hào)的產(chǎn)生[10]。其具體的實(shí)現(xiàn)方法如圖5所示。
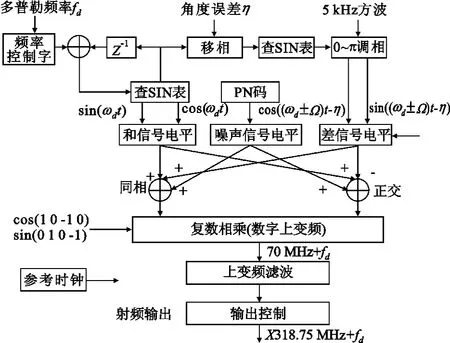
圖5 模擬器原理框圖Fig.5 Principle map for simulator
4 試驗(yàn)效果評(píng)估
選取該連續(xù)波雷達(dá)動(dòng)態(tài)目標(biāo)模擬器的某次任務(wù)聯(lián)試的數(shù)據(jù)進(jìn)行分析。中心每間隔50 ms將目標(biāo)的位置和速度送到模擬器,模擬器根據(jù)彈道和天線位置模擬產(chǎn)生下行和差信號(hào),耦合進(jìn)入連續(xù)波雷達(dá),完成動(dòng)態(tài)目標(biāo)的跟蹤訓(xùn)練。
在整個(gè)跟蹤時(shí)段內(nèi),接收機(jī)解調(diào)的方位俯仰誤差電壓較小并保持穩(wěn)定,實(shí)時(shí)驅(qū)動(dòng)天線使其對(duì)準(zhǔn)虛擬目標(biāo),實(shí)現(xiàn)閉環(huán)跟蹤。接收機(jī)解調(diào)的方位俯仰誤差電壓如圖6所示。

圖6 自跟蹤時(shí)段內(nèi)方位俯仰誤差電壓Fig.6 Error unit of AZ and EL in auto tracking
5 結(jié) 語(yǔ)
本文設(shè)計(jì)了適應(yīng)于連續(xù)波雷達(dá)的動(dòng)態(tài)目標(biāo)模擬器,實(shí)現(xiàn)了具有真實(shí)環(huán)境的下行射頻信號(hào)產(chǎn)生,信號(hào)中包含動(dòng)態(tài)目標(biāo)與天線電軸的角度誤差,經(jīng)接收機(jī)解調(diào)后驅(qū)動(dòng)電機(jī)進(jìn)行人員的閉環(huán)跟蹤訓(xùn)練。
該動(dòng)態(tài)目標(biāo)模擬器已安裝在某型連續(xù)波雷達(dá)中,在試驗(yàn)任務(wù)聯(lián)調(diào)聯(lián)試、設(shè)備功能自動(dòng)化檢查和人員針對(duì)性跟蹤訓(xùn)練中發(fā)揮了不可替代的作用。
[1]張振飛.動(dòng)態(tài)目標(biāo)信號(hào)模擬器的設(shè)計(jì)及實(shí)現(xiàn)[J].電訊技術(shù),2009,49(8):94-97.ZHANG Zhen-fei.Design and Realization of a Dynamic Object Signal Simulator[J].Telecommunication Engineering,2009,49(8):94-97.(in Chinese)
[2]杜利平,蘇廣川.毫米波雷達(dá)導(dǎo)引頭中頻模擬器技術(shù)研究與實(shí)現(xiàn)[J].彈箭與制導(dǎo)學(xué)報(bào),2004,24(3):295-298.DU Li-ping,SU Guang-chuan.The Design and Implementation of MMW IF Simulatro for Radar Seeker[J].Rockets Missiles andGuidance,2004,24(3):295-298.(in Chinese)
[3]衛(wèi)健,陳定階.雷達(dá)目標(biāo)模擬器[J].現(xiàn)代雷達(dá),2002,22(1):54-57.WEI Jian,CHEN Ding-jie.Radar Target Simulator[J].Modern Radar,2002,22(1):54-57.(in Chinese)
[4]肖鵬斌.多普勒頻移模擬器的設(shè)計(jì)[J].儀器儀表用戶,2011,19(1):63-66.XIAO Peng-bin.Design of Doppler frequency-shift simulator[J].Electronic Instrumentation Customer,2011,19(1):63-66.(in Chinese)
[5]胡文華,王志云,代建鵬.雷達(dá)回波模擬器設(shè)計(jì)與應(yīng)用[J].儀器儀表學(xué)報(bào),2003,24(4):113-115.HU Wen-hua,WANG Zhi-yun,DAI Jian-peng.Design and Application of Radar Echo Simulator Based on Virtual-instrument[J].Chinese Journal of Scientific Instrument,2003,24(4):113-115.(in Chinese)
[6]馬慧萍,向海飛.用于訓(xùn)練模擬器的雷達(dá)真實(shí)目標(biāo)航跡提取算法[J].電子科技,2011,24(3):59-61.MA Hui-ping,XIANG Hai-fei.An Extractive Algorithm of Radar True Target Tracking Data Used for the Training Simulator[J].Electronic Science&Technological,2011,24(3):59-61.(in Chinese)
[7]劉培毅,劉鑫,侯龍濤.一種雷達(dá)中頻信號(hào)模擬器實(shí)現(xiàn)方法[J].戰(zhàn)術(shù)導(dǎo)彈技術(shù),2007,9(5):86-89.LIU Pei-yi,LIU Xin,HOU Long-tao.The Realization of the Radar Simulator[J].Tactical Missile Technology,2007,9(5):86-89.(in Chinese)
[8]張嘯,高新義,李迎綱.一種雷達(dá)模擬目標(biāo)實(shí)現(xiàn)的方法[J].現(xiàn)代電子技術(shù),2011,34(3):79-81.ZHANG Xiao,GAO Xin-yi,LI Ying-gang.Implementation Method of Radar Simulative Target[J].Modern Electronics Technique,2011,34(3):79-81.(in Chinese)
[9]向道樸,黎向陽(yáng),孟憲海.一種通用雷達(dá)回波模擬器的設(shè)計(jì)與實(shí)現(xiàn)[J].現(xiàn)代雷達(dá),2007,29(10):84-86.XIANG Dao-pu,LI Xiang-yang,MENG Xian-hai.Design and Implementation of a General Digital Radar Echo Simulator[J].Modern Radar,2007,29(10):84-86.(in Chinese)
[10]趙泉,江偉明.通用雷達(dá)射頻信號(hào)模擬器設(shè)計(jì)與實(shí)現(xiàn)[J].船舶電子工程,2009,29(9):198-201.ZHAO Quan,JIANG Wei-ming.Design and Realization of General Radar RF Signal Simulators[J].Ship Electronic Engineering,2009,29(9):198-201.(in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06