雙饋電機復功率特性研究及四維分析
2012-08-07 08:14:06戰亮宇金新民
電工技術學報 2012年1期
關鍵詞:機械
戰亮宇 金新民 張 祿
(北京交通大學電氣工程學院 北京 100044)
1 引言
雙饋電機(Doubly-Fed Induction Machine,DFIM)在結構上類似繞線轉子異步電機[1],定轉子分布有三相對稱繞組。定子繞組直接引出,一般連接到電網;轉子繞組經過集電環引出,一般連接到變頻電源。隨著風力發電的迅速發展,雙饋電機以其變流器容量小、無功功率控制靈活的優勢被廣泛應用在雙饋型風力發電系統中,該系統能在較大范圍內調節電機轉速以實現風能利用率最大化[2-3]。
與籠型電機和同步電機不同,DFIM 定轉子以平等的地位參與到機電能量轉換過程中。定子與電網進行復功率交換的同時轉子與其激勵電源之間也有復功率交換,使得雙饋電機定轉子和機械軸間的有功功率和無功功率傳遞關系更加復雜。能量守恒定律是普遍成立的,DFIM 能量轉換過程中有功功率必然是守恒的,諸多文獻對此有統一的觀點[3-4]。對于系統無功功率是否守恒的問題,文獻[3]認為頻率歸算會導致無功功率不守恒;文獻[5]討論了定轉子無功功率平衡式,然而其式中的轉子無功功率并非實際值。在籠型電機等效電路中代表機械功率的元件是從轉子側等效電路中分離出來的[6]。本文詳細分析了DFIM等效電路推導中頻率歸算過程,按照籠型電機的元件分離思路將頻率歸算后的轉子側電路分成了物理意義明確的兩部分并定義了機械復功率,提出了在DFIM機電能量轉換過程中從定子側看復功率守恒的觀點,分析了轉子變流器能以較小的勵磁容量在定子側獲得較大的無功功率的原因。
雙饋電機矢量控制可以實現有功功率和無功功率解耦控制[7-8]。一般只關注在最佳風能利用率運行曲線上的運行特性,這些特性由二維平面曲線圖來表示。文獻[2-3]對定子輸出復功率進行了分析并通過關系式來表達其數量關系,然而關系式為復雜的多元函數并不直觀簡便。在不超過運行范圍的前提下,雙饋電機可以工作在定子輸出有功功率、無功功率和轉差率組成的三維空間中的任意點。本文利用Matlab的數據可視化功能,將三維空間中的工作點處電機性能用四維圖表現出來,可以簡便明晰地觀察到雙饋電機在三維空間中的運行特性。
2 雙饋電機復功率關系
2.1 頻率歸算
類似于對籠型電機等效電路的推導[6],在分析DFIM 工作原理的基礎上可得其定轉子耦合電路如圖1所示,文中對定轉子側電路均采用發電機慣例。定轉子電路通過氣隙磁場耦合,轉子磁動勢在空間以同步轉速運動,產生恒定的電磁轉矩。定子側等效電路頻率為 f1,轉子側等效電路頻率為 f2,定、轉子側頻率的關系為f2=sf1,其中s為轉差率。
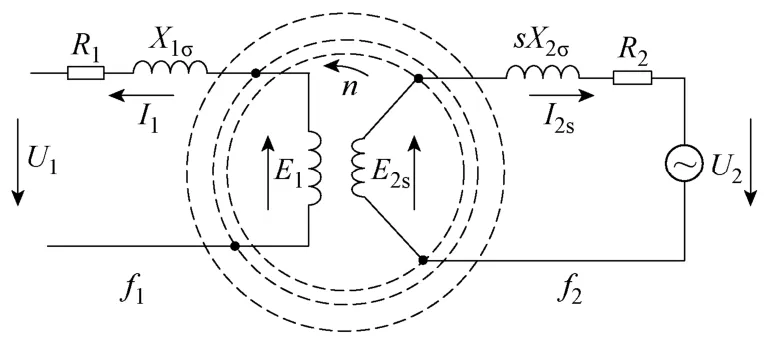
圖1 雙饋電機定轉子耦合電路Fig.1 Coupled circuit of stator and rotor of DFIM
頻率不同使定轉子側電路無法連接到一起,為得到統一的等效電路需對轉子側電路進行頻率歸算。為使轉子電路頻率與定子一致,須令轉子靜止以使轉差率 s=1。頻率歸算過程應保持轉子空間磁動勢不變,以使歸算前后轉子對氣隙磁場的影響相同,即,轉子在機電能量轉換過程中作用相同。故頻率歸算前后必須保持轉子電流幅值不變。由于感應電勢與轉差率成正比,歸算后的轉子感應電勢變為歸算前的 1/s倍。為使其空間相位不變必須使轉子漏阻抗和轉子外加勵磁也變為原來的1/s倍。
頻率歸算后的定轉子耦合電路如圖2所示。轉子電路頻率變為 f1,轉子電流幅值不變,轉子電路的感應電勢、轉子勵磁源、轉子漏抗和轉子電阻的幅值均變為實際電路的 1/s倍。頻率歸算完畢后轉子電路中基爾霍夫電壓定律仍然成立。由于轉子空間磁動勢保持不變,各相元件所吸收的功率之和與頻率歸算前的轉子電路和轉子機械軸所吸收的功率之和相等。
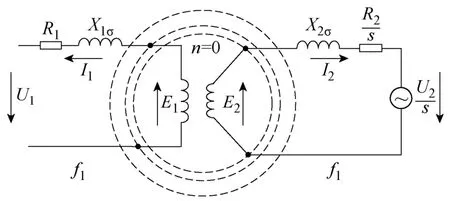
圖2 頻率歸算后雙饋電機定轉子耦合電路Fig.2 Coupled circuit of stator and rotor of DFIM after frequency conversion
歸算前轉子電路方程為

式中,ω2為轉子角頻率。

式中,ω1為定子角頻率;E2s=sE2; I2s=I2。
式(2)可寫為

2.2 機械復功率
按照籠型電機中對轉子側元件的分離思路[6]將圖2中的轉子側等效電路分解成如圖3所示。虛線框中的元件大小與歸算前轉子電路中的漏阻抗和轉子勵磁一一對應相等。又因轉子電流幅值和相位并未改變,故虛線框中的元件所消耗的復功率便分別對應著轉子漏抗損耗、轉子電阻損耗、轉子勵磁消耗的復功率。
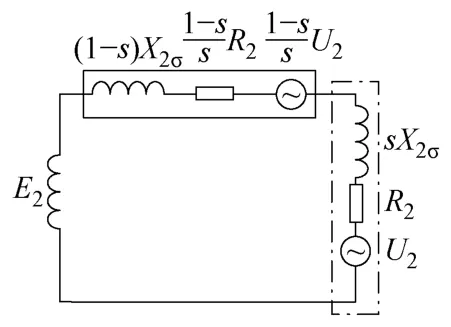
圖3 雙饋電機轉子側等效電路Fig.3 Rotor equivalent circuit of DFIM
實際轉子由機械部分和電路部分組成,轉子機械部分通過旋轉機械功率的輸入或輸出參與機電能量轉換過程。在頻率歸算過程中,轉子機械部分的作用被等效在各相轉子等效電路中。若認為圖3中虛線框中的元件可代表歸算前轉子電路部分,那么實線框中的三個等效元件就可認為代表歸算前轉子機械軸的作用,這些機械軸等效元件所消耗復功率可寫為

式中,Pmec為機械有功功率;Qmec為機械無功功率;Smec為機械復功率。
將虛線框中的三個元件所消耗的復功率寫為

也就是說從氣隙傳遞到轉子側的功率有s部分消耗在轉子電路上,其余1-s部分消耗在機械軸上。
頻率歸算后還需進行繞組歸算以使轉子相數和有效匝數與定子相同以將定、轉子等效電路連接到一起。經過繞組歸算后雙饋電機的等效電路如圖4所示。圖4中帶上標的量由圖3中的量乘變壓比和阻抗變比而來,即: U2′ =keU2,R2′= kekR12,= kekiX2σ。其中,ke為定轉子變壓比;ki為定轉子變流比。
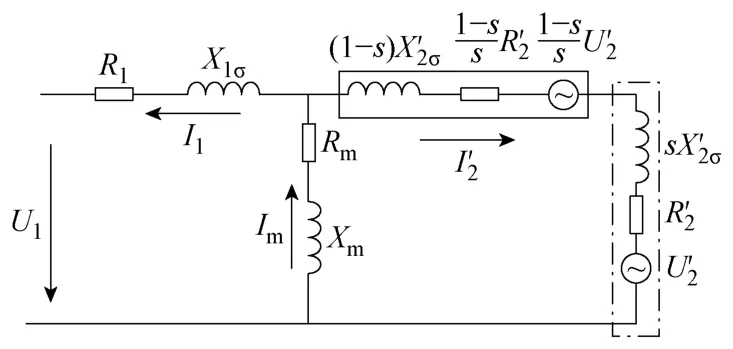
圖4 雙饋電機等效電路Fig.4 Equivalent circuit of DFIM
繞組歸算前后復功率不變[6],圖 4中虛線框中元件代表實際轉子電路,實線框中元件代表機械軸的作用。機械有功功率和無功功率體現了在相等效電路中轉子機械軸參與機電能量轉換的方式。
2.3 復功率守恒
根據相電路復功率理論易知式(7)和式(8)成立。

式中,P1、PCu1、Pm、P2、PCu2、Pmec分別為定子輸出有功功率、定子銅耗、勵磁損耗、轉子輸出有功功率、轉子銅耗、機械有功功率;Q1、QX1σ、Qm、Q2、QX2σ、Qmec分別為定子輸出無功功率、定子漏抗損耗、勵磁無功功率、轉子輸出無功功率、轉子漏抗損耗、機械無功功率。
式(7)和式(8)是歸算到定子側的DFIM等效電路中的功率關系式,說明從定子側看DFIM能量轉換過程中有功功率和無功功率均守恒。由式(6)知機械復功率為轉子電路復功率的(1-s)/s倍。以次同步發電為例,轉子變流器消耗的有功功率為負值,即轉子變流器向氣隙磁場提供有功功率,同時轉子機械軸等效元件向氣隙磁場提供了(1-s)/s倍于轉子電路的有功功率。無功功率的傳遞過程與有功功率類似,機械軸等效元件所消耗的無功功率也是轉子電路的(1-s)/s倍。當轉子電路向電機提供無功功率時,從定子側看機械軸等效元件同時提供相應比例的無功功率,這是轉子變流器以較小的勵磁容量在定子側獲得較大無功功率的原因。
假設圖4中實線框兩端的電壓有效值為U,電流有效值為為 I,角頻率為ω,功率因數角為φ,定子側相數為 3,則機械軸消耗的有功功率為P∑mec=3Pmec=3UIcosφ,三相電路中實線框所消耗的瞬時功率之和為
式(10)說明機械軸等效元件在一相電路中所消耗的瞬時功率是波動的,三相瞬時功率之和卻是常量,其值為單相有功功率Pmec的3倍。三相機械有功功率之和等于轉軸機械功率;機械無功功率不直接體現在機械軸的轉速和轉矩這兩個量上,它表征了能量在相與相之間的往返流動。
3 轉子無功功率特性
3.1 負頻率相量性質
雙饋電機超同步運行時,轉子轉速高于同步轉速,轉差率s<0。由于轉子頻率f2=sf1<0,故轉子頻率為負值。
根據相量法中復阻抗定義[9]

電阻的復阻抗與頻率無關,電感和電容的復阻抗都是頻率的函數。根據復功率的定義

電阻總是消耗有功功率 P=I2R,電感只消耗無功功率Q=I2ωL,電容只消耗無功功率Q=-I2/ωC。
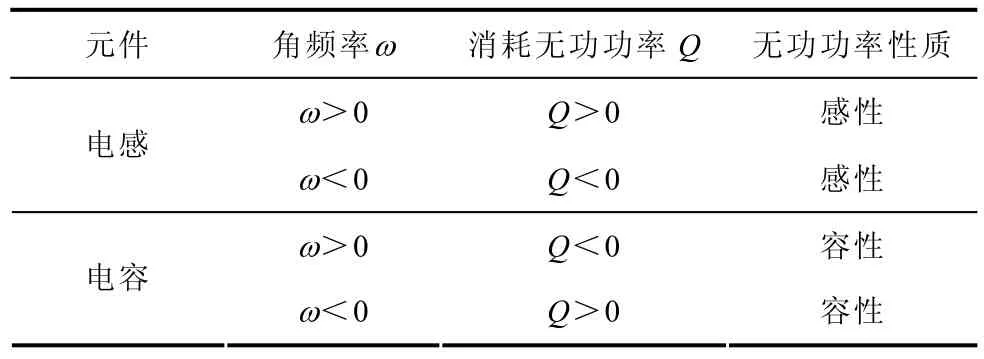
表 無功功率代數值、性質和頻率對應關系Tab.Realtionship between reactive power,character(capacitive/inductive) and frequency
采用與IEEE和IEC對無功功率源和無功功率負載相同的規定[10],電容是無功功率的源,它總是發出感性無功功率(消耗容性無功功率),電感是無功功率負載,它總是吸收感性無功功率(發出容性無功功率)。在正頻率和負頻率下電感和電容消耗的無功功率代數值和性質(感性/容性)列在上表中。從上表可知,判定無功功率的性質(感性/容性)應兼顧其代數值的符號和正弦電路頻率的符號。
3.2 DFIM無功功率特性
在分析定轉子無功功率性質時需要注意次同步和超同步運行時轉子無功功率性質和符號的對應關系。以定子輸出正無功功率Q1>0為例,由式(6)、式(8)知

QX1σ、Qm總是大于零,超同步工況下s<0,則式(11)右邊為正值,忽略轉子漏抗損耗可得Q2>0,即定轉子側同時輸出正無功功率,但這并不表示定轉子同時輸出感性無功功率,因為在超同步工況下,Q2>0對應著容性無功功率;同理可知,在次同步工況下,定轉子也不可能同時輸出感性無功功率。由于激磁無功功率和定轉子漏阻抗總是需要感性無功功率,定轉子可能工作在同時輸出容性無功功率的狀態。綜合可知在機電能量轉換過程中定、轉子至少有一方提供感性無功功率支持。
4 DFIM性能四維圖
在雙饋風力發電系統中,一般以轉速、定子有功功率(轉矩)和定子輸出無功功率大小標示雙饋電機的穩態運行狀況。在不超過其運行范圍的條件下,雙饋電機可以運行在上述三個變量組成的三維空間內的任一點,這些點是唯一的。在這些工作點上轉子輸出功率特性及電機效率特性可以用四維圖(見圖 5)來表述,從而可以明晰而簡便地看到雙饋電機在整個運行區間內的特性。
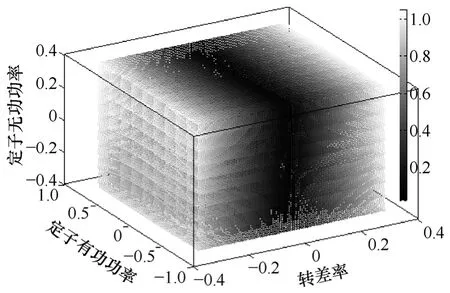
圖5 轉子電壓四維圖Fig.5 Rotor voltage four dimension diagram
轉子電壓四維圖5中x、y、z坐標分別為轉差率,定子有功功率,定子無功功率,圖中各個量的單位為pu。四維圖由等位線族組成,在各個三維點上轉子電壓值以顏色深淺來表示,其對應的值在圖右上部的圖例中。在圖5中做垂直于x軸的切面,在切面內轉子電壓基本不變,說明轉子電壓與定子功率基本無關,轉差率是決定轉子電壓大小的主要因素。
圖6為轉子電流四維圖,文中所有四維圖坐標及單位均與圖5相同。做垂直于x軸的切面,每個切面基本相同,即,轉子電流與轉差率大小基本無關,它由定子上的有功功率和無功功率共同決定。轉子電流最小值不是在定子復功率為零處,是在定子有功為零,無功功率為負值處。這個點上定子向電網發出容性無功功率,為電機提供全部勵磁磁動勢。
在轉子視在功率圖7中僅繪制了0.8(pu)以下的運行點以方便看清等位線族的變化趨勢。轉子視在功率隨轉差率增大而增大,也和定子復功率有關。從垂直于x軸的方向來看,其最小值點在有功功率為零,無功功率為負值處。
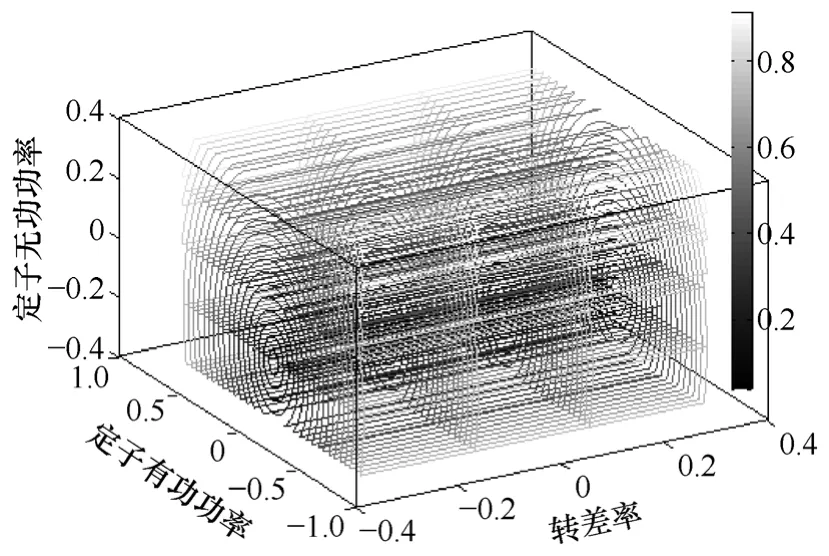
圖6 轉子電流四維圖Fig.6 Rotor current four dimension diagram
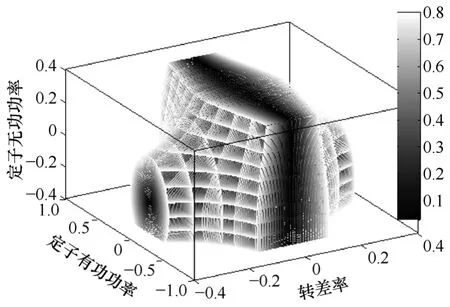
圖7 轉子視在功率四維圖Fig.7 Rotor apparent power four dimension diagram
在轉子有功功率圖 8中僅繪制了值在-0.5~0.6(pu)之間的點。做垂直于 z軸的切面,每個切面基本相同,說明轉子有功功率與定子無功功率基本無關。轉子輸出有功功率在次同步電動和超同步發電工況為正值,在次同步發電和超同步電動工況為負值。
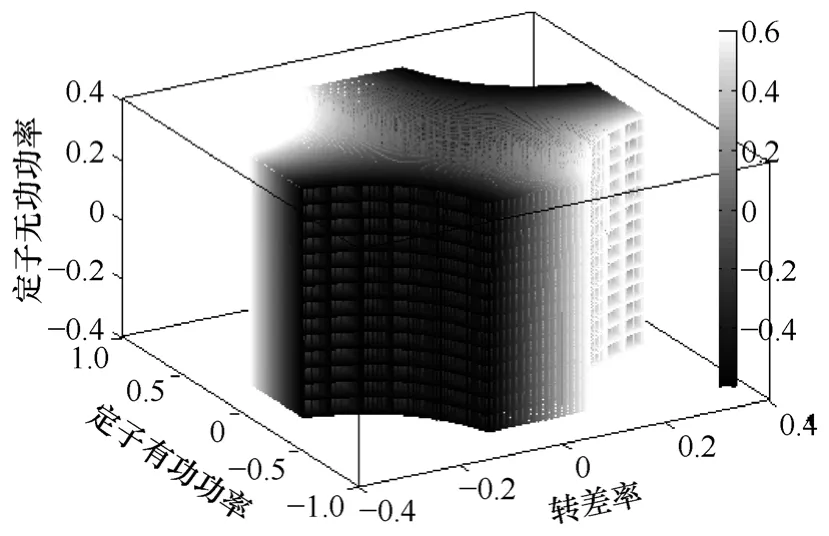
圖8 轉子有功功率四維圖Fig.8 Rotor active power four dimension diagram
在轉子無功功率圖9中僅繪制了-0.5~0.6pu的點。做垂直于y軸的切面,每個切面基本相同,說明轉子無功功率與定子有功功率基本無關。轉子輸出感性無功功率的點位于圖的下部,只有定子輸出較多的容性無功功率時,轉子才能輸出感性無功功率。圖8和圖9表明在DFIM中有功功率和無功功率的傳遞是相對獨立的。
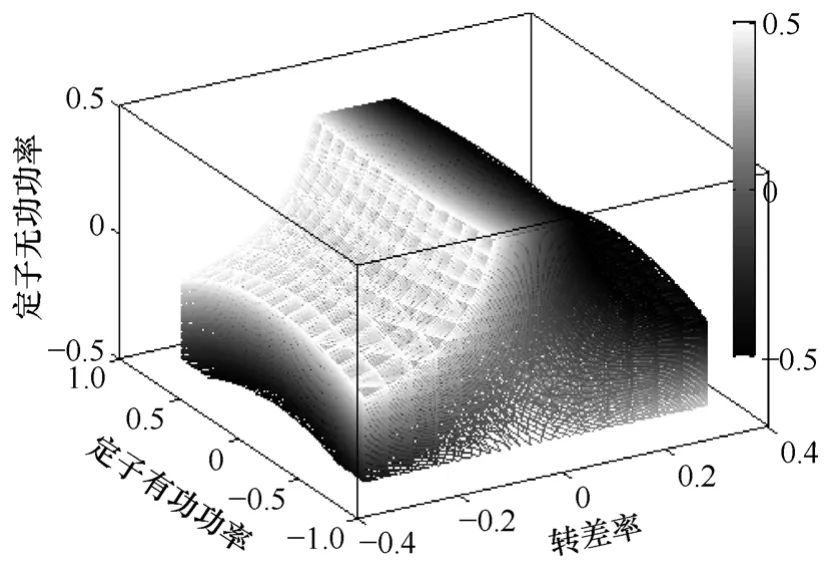
圖9 轉子無功功率四維圖Fig.9 Rotor reactive power four dimension diagram
在電機效率圖10中做垂直于z或x軸的切面,每個切面基本相同,說明效率主要由有功功率決定,與無功功率和轉差率關系不大。越靠近有功功率原點等位線族越密集,離有功功率原點越遠等位線族越疏離,這說明電機效率增長速率隨有功功率增長越來越慢。
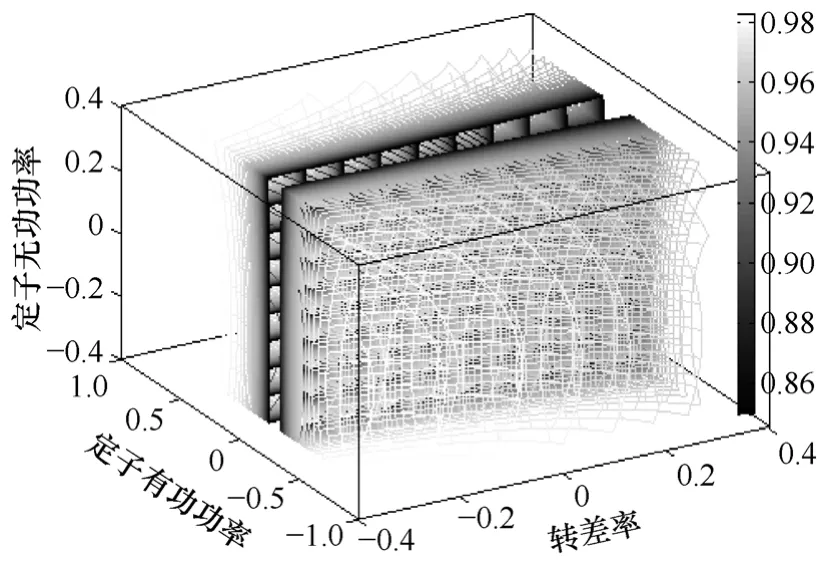
圖10 電機效率四維圖Fig.10 Machine efficiency four dimension diagram
5 結論
本文在研究雙饋電機等效電路推導過程的基礎上定義了機械有功功率和機械無功功率,提出了雙饋電機機電能量轉換過程中從定子側看復功率守恒的觀點。分析了負頻率正弦電路的復功率特點,并應用到對雙饋電機無功功率關系的分析中,指出雙饋電機定轉子不可能同時輸出感性無功功率。采用四維圖的方式明晰直觀地表現了雙饋電機在運行區間內的各種特征。
[1]林瑞光, 趙榮祥, 黃進, 等.水輪發電機交流勵磁變速運行的控制策略[J].電工技術學報, 1995,10(3): 1-5.Lin Ruiguang, Zhao Rongxiang, Huang Jin, et al.Control strategy of hydrogenerator with AC excitation running at adjustable speeds[J].Transactions of China Electrotechnical Society, 1995, 10(3): 1-5.
[2]寧玉泉, 李煒, 涂光瑜.雙饋交流勵磁變速電機的穩態特性及勵磁容量分析[J].大電機技術, 2005(6):24-27, 30.Ning Yuquan, Li Wei, Tu Guangyu.Analysis of steady-state characteristic and excitation capacity for doubly fed AC excitation variable-speed induction motor[J].Large Electric Machine and Hydraulic Turbine, 2005(6): 24-27, 30.
[3]劉其輝, 賀益康, 張建華.交流勵磁變速恒頻雙饋型異步發電機的穩態功率關系[J].電工技術學報,2006, 21(2): 39-44, 62.Liu Qihui, He Yikang, Zhang Jianhua.Steady-state power relation of AC-excited variable-speed constantfrequency doubly-fed induction generator[J].Transactions of China Electrotechnical Society, 2006, 21(2): 39-44, 62.
[4]邱培基, 湯寧平.串聯聯接雙饋同步感應發電機的分析及設計特點[J].電工技術學報, 1996, 11(5): 1-5.Qui Peiji, Tang Ningping.Analysis and design feature of seris-connected doubly-fed synchronous induction generator[J].Transactions of China Electrotechnical Society, 1996, 11(5): 1-5, 62.
[5]邱培基, 鄭寧, 卓忠疆.自勵雙饋同步感應發電機的分析與單片機控制[J].電工技術學報, 1992, 7(4):9-13.Qui Peiji, Zheng Ning, Zhuo Zhongjiang.The analysis of self-excited doubly-fed synchronous induction generator and its single-chip microprocessor-based control system [J].Transactions of China Electrotechnical Society, 1992, 7(4): 9-13.
[6]湯蘊璆: 電機學[M].1版.北京: 機械工業出版社,1999.
[7]Yuan Xibo, Chai Jianyun, Li Yongdong.A converter based adjustable speed drive for doubly fed induction machine with centrifugal loads[C].IEEE Energy Conversion Congress and Exposition, 2009: 2512- 2519.
[8]Yuan Guofeng, Chai Jianyun, Li Yongdong.Vector control and synchronization of doubly fed induction wind generator system[C].Power Electronics and The 4th International Motion Control Conference, 2004:886-890.
[9]邱關源.電路 [M].4版.北京: 高等教育出版社,1999.
[10]Theodore Wildi.Electrical machines, drives and power systems[M].5th ed.Beijing: Science Press and Pearson Education, 2002.
[11]林成武, 王曉東, 姚興佳.雙饋風力發電機功率特性的理論分析及實驗研究[J].太陽能學報, 2008,29(3): 328-331.Lin Chengwu, Wang Xiaodong, Yao Xingjia.The theoretical analysis and experiment on power performance of doubly-fed wind power generator [J].Acta Energiae Solaris Sinica, 2008, 29(3): 328-331.
[12]姚興佳, 劉君, 邢作霞, 等.雙饋變速恒頻風電機組的功率特性[J].沈陽工業大學學報, 2008, 30(3):270-275.Yao Xingjia, Liu Jun, Xing Zuoxia, et al.Power characteristics of variable speed constant frequency doubly-fed wind turbines[J].Journal of Shenyang University of Technology, 2008, 30(3): 270-275.
[13]李剛, 程時杰, 文勁宇, 等.利用柔性功率調節器提高電力系統穩定性[J].中國電機工程學報, 2006,26(23): 1-6.Li Gang, Cheng Shijie, Wen Jinyu, et al.Power system stability enhancement by the flexible power conditioner[J].Proceedings of the CSEE, 2006,26(23): 1-6.
[14]邱培基, 夏書杰, 卓忠疆.雙饋調速同步感應電動機的分析及控制[J].電工技術學報, 1994, 9(3):5-10.Qui Peiji, Xia Shujie, Zhuo Zhongjiang.The analysis and control of doubly-fed adjustable-speed synchronous induction motor [J].Transactions of China Electrotechnical Society, 1994, 9(3): 5-10.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
