單目攝像機成像系統的設計及其研究
2012-07-09 00:39:26周云龍王雪亮
東北電力大學學報 2012年1期
關鍵詞:系統
周云龍,王雪亮
(1.東北電力大學能源與動力工程學院,吉林吉林132012;2.東北電力大學自動化工程學院,吉林吉林132012)
計算機視覺[1]是計算機實現人的視覺功能-對客觀世界三維場景的感知識別和理解。立體成像系統是3D顯示測量系統的關鍵部分,相當于人的“眼睛”,用來獲取流場的圖像信息并傳送到計算機進行處理。原始圖像越接近實際情況,經過圖像處理得到的結果將會越可靠,科學家們從仿生的角度提出了類似人眼視覺的雙目視覺或立體視覺系統。立體視覺是仿照人類利用雙目線索感知距離的方法,實現對三維信息的獲取,實際上實現上一般都采用兩臺或多臺攝像機對同一事物從不同位置成像,從視差中恢復距離信息。在機器視覺系統中,雙目立體視覺的成像主要有兩種方法,一是利用雙攝像機從不同的角度獲取周圍景物的兩幅數字圖像,而是由單攝像機在不同時刻從不同角度獲取周圍景物的兩幅數字圖像。而單目立體視覺傳感器是通過利用實驗裝置來達到雙目攝像機成像系統[2]功能,其精度也能基本達到要求。
在對氣液兩相流體[3]中的氣泡進行研究時,為了提取氣泡的參數及研究其在流體中的變化,利用攝像機進行拍攝并用圖像處理的方法進行檢測是一種重要的研究方法。此方法的關鍵在于對攝像機內外參數的標定[4],目前基于透鏡標定的方法有很多種,例如Tasi方法、Martins的兩平面方法,張正友法[5]等等。張正友法是一種新的、靈活的方法,此方法具有很好的魯棒性,又不需要昂貴的精制標定塊,推進在他在實驗室中的應用[6]。目前本課題主要是對實驗裝置進行了設計,對單目立體視覺成像系統在實驗中的可行性進行了檢驗,后續將對攝像機的標定進行深入的研究。
1 單目立體視覺傳感器的原理
單目立體視覺傳感器[7]由一臺高速攝像機和平面鏡反射組合臺組成,測量示意圖如圖1所示,M1、M2是一對固定的平面鏡,兩片鏡子夾角為90度,反射面在外側。P1、P2為兩組可平移的平面鏡,反射面在內測,它們的位置與中心線的距離為d,和水平基準線的夾角為Ф。被拍攝物置于傳感器前方,并調整它位置使其在傳感器的有效視場里。該單目立體視覺傳感器實現的原理本質上是利用平面鏡反射組將一幅圖像經過反射形成兩幅虛像,從而在一個CCD像面上得到了被測對象在兩個方向上的二維信息,經過圖像分割,得到兩幅圖像,利用特征提取、立體匹配等算法提取深度信息,該被測物在空間上實現三維重構奠定了基礎。
為了建立單目立體視覺傳感器的成像模型,定義參數如下:
(1)傳感器系統中結構參數定義
f:透鏡焦距;
β:攝像機透視中心對CCD像面的張角;
γ:兩組反射鏡之間的夾角;

圖1 單目傳感器結構圖
α:反射鏡M1、M2之間的夾角;
h1:攝像機與反射鏡組M1、M2之間的垂直距離;
h2:兩組反射鏡之間的交點與反射鏡M1、M2間的距離;
h:空間坐標平面xoy距離反射鏡M1、M2的距離。
(2)光路分解后對應的雙目立體視覺系統中的結構參數定義
B:攝像機兩個虛像之間的基線距離;
θ:光軸虛像與Z軸之間的夾角;
h0:有效視場相對于第一組反射鏡的最近距離;
△h:有效視場的深度。
(3)坐標系定義
(x,y,z):被測物所在的三維空間坐標系,o為坐標原點;
(Xl,Y1):CCD右半像面對應的二維坐標系;
(X2,Y2):CCD左半像面對應的二維坐標系;
(x1’,y1’,z1’):以虛光軸與平面xoy的交點O1’為坐標原點,以O1’O1為z1’軸建立的坐標系;
(x2’,y2’,z2’):以虛光軸與平面xoy的交點O2’為坐標原點,以O2’O2為z2’軸建立的坐標系。

圖2 單目立體視覺傳感器結構示意圖
通過分析可知:參數f、β、γ、α、h1、h2反映了攝像機與反射鏡之間的位置關系,決定了單目視覺傳感器的整體結構,也決定了映射過程中各坐標系之間的關系。
根據圖2分析傳感器的成像原理,被測物在有效視場內經對稱角度方向分別通過兩組反射鏡的光路折疊,映射到CCD攝像機的左、右半平面中,使其充當了雙目的角色。傳感器中的兩個虛像面如圖2中的放置方法,光軸與Z軸的夾角θ遠遠大于張角β,有效視場在水平方向和深度方向都周所以此傳感器適合近距離測量。
2 單目立體視覺傳感器硬件實現

圖3 中央平面鏡固定裝置
在確定出傳感器的結構上的理想參數后,在制作過程中主要考慮傳感器的精度[8]和靈活性。在實驗過程中,要有很高的可調性,盡量減少平面鏡的垂直誤差。裝置主要包括三個部分:中央平面鏡固定裝置、兩側平面鏡可調裝置以及水平臺座。如圖3所示,中央平面鏡固定裝置為一直角水平座,中間設計為兩條4 mm寬的直角溝槽,槽深為20 mm,槽身兩側分別各開兩個螺旋孔,通過螺旋孔來調節玻璃的垂直度,在槽兩側也開有六個螺孔,對應水平臺座,達到固定的目的。兩側平面鏡可調裝置,如圖4所示,它的一端開有一個螺孔,配合水平臺座上的溝槽能夠水平移動的同時又能水平轉動,實現兩個方向上的靈活性,這樣便可以擴大有效視場的范圍,使操作在實驗過程中所受的約束大大減小。側邊平面鏡裝置也開有4 mm寬,20 mm深的溝槽,在加工的時候要保證槽底的水平度。水平臺座,如圖5所示,臺座長500 mm,寬350 mm,厚10 mm,使用亞克力材料加工而成,兩側平面鏡裝置能固定在上面并能沿溝槽左右移動和轉動,而中央平面鏡裝置固定在上面不動。

圖4 兩側平面鏡可調裝置
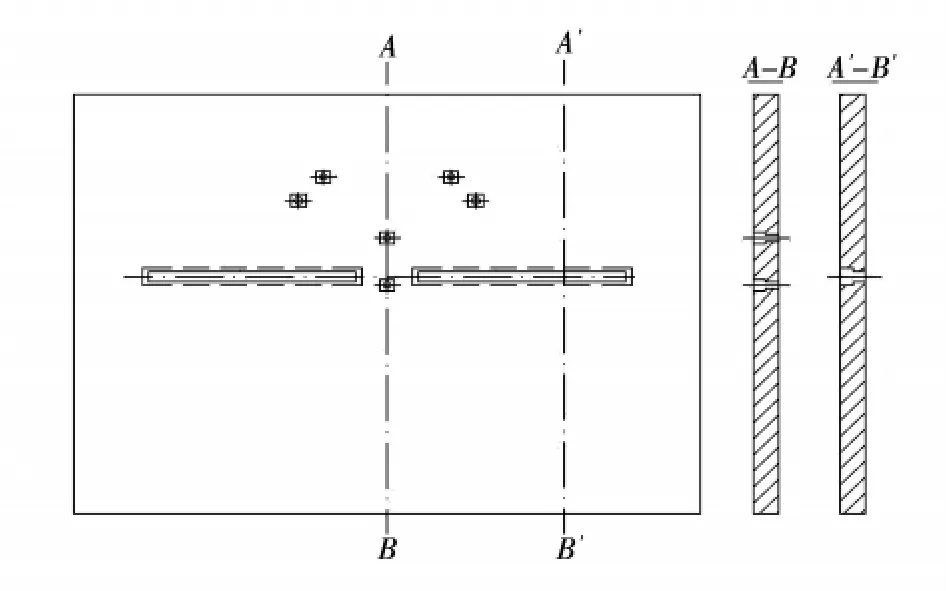
圖5 水平承載臺
3 實際應用
此實驗裝置主要目的是提取兩相流體中氣泡的參數,對氣泡在兩相流體中的運動機理進行研究,在進行實驗前,首先要對攝像機進行標定,我們應用了此系統對標定板進行了拍攝,圖6即為此系統拍攝標定板圖像,從而可以看出拍攝的圖像較為清晰,達到了應有的效果,可以根據拍攝圖像進行標定。

圖6 攝像機拍攝靶標圖像
處理靶標圖像的過程如下:
(1)圖像去噪;
(2)根據直方圖,找到峰峰間的谷值作為閾值進行二值化;
(3)圖像反色;
(4)用圖像標記算法進行目標標記,并顯示為彩色索引圖像,如圖7。

圖7 靶標處理圖像示意圖
由圖7可見,處理后的圖像效果清晰,符合實驗要求,我們可以根據圖像計算標記物的質心坐標,經過坐標變換后,對攝像機進行標定,后續便可以對兩相流體中的氣泡進行拍攝,提取氣泡特征參數,根據參數實現三維重建。
4 結 論
實驗表明,單目立體視覺成像系統完全能夠達到雙目成像系統的效果要求,較清晰的拍攝到了圖像,我們可以根據拍攝到圖像,應用圖像處理的方法,如濾波、去噪后得了更加清晰的圖像。本課題對實際機械進行了具體的設計和加工,完成了整套系統的開發,并通過實驗獲得了清晰的靶標圖像,驗證了系統的價值。
[1]馬頌德,張正友.計算機視覺[M].北京:科學出版社,1998.
[2]朱效明,高稚允.雙CCD立體視覺系統的理論研究[J].光學技術,2003,29(3):298-30.
[3]周云龍,洪文鵬,孫斌.多相流體力學[M].北京:科學出版社,2008.
[4]張廣軍.機器視覺[M].北京:科學出版社,2005.
[5]Z.Zhang.A flexible new technique for camera calibration[J].IEEE Transactions on Pattern.Analysis and Machine Intelligence.2000,22(11):1330-1334.
[6]閆麗.氣液兩相流場中氣泡行為3D測量關鍵技術研究[D].天津:天津大學,2006.
[7]S.J.Haam,R.S.Brodkey.Motions of dispersed beads obtained by particle tracking velocimetry measurements PartⅡ[J].International Journal of Mu1t1phase Flow,2000(26):1419-1438.
[8]閆麗,段發階.單目立體視覺傳感器的優化設計及精度分析[J].傳感技術學報,2006,19(2):349-352.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
