基于WI-FI的井下定位算法研究*
2012-06-12 09:36:32劉曉文張秀均郝麗娜郁萬里
傳感技術學報 2012年6期
劉曉文,張秀均,郝麗娜,郁萬里,王 杰
(中國礦業大學物聯網(感知礦山)研究中心,江蘇徐州221008)
在各種監測與監控系統中,節點的位置信息有著非常關鍵的作用[1],如車輛導航、礦井井下人員定位、醫療看護對象定位[2]、特定資產跟蹤管理等。眾所周知的GPS(Global Positioning System)衛星導航定位技術在不受干擾的室外可以很好的實現定位[3]。然而,這項技術在室內和非視距環境定位誤差較大,對于地下幾百米甚至幾千米的采礦巷道[4]就會完全失效。隨著無線傳感器網絡的快速發展,無線網絡節點的定位使為特殊環境的局部區域提供精確實時的位置信息服務得以實現成為可能。近年來,無線傳感器網絡定位技術由于廣泛的應用前景而得到了迅猛發展。根據不同的網絡拓撲結構、無線定位技術及應用環境,國內外學者分別提出了不同的定位算法。常見的無線定位技術有藍牙(Bluetooth)、紅外(infrared)、Wi-Fi(wireless fidelity)、Zigbee、超寬帶(ultra wide band)等[5]。
本文采用基于信號強度的定位技術,目前,基于信號強度的室內定位系統已有,比如,Intel研究的PlaceLab系統、Trapeze Networks Location Appliance LA200、Ekahau RTLS、Aeroscout、Cisco WCS 等系統[6],各個系統雖然都是基于信號強度進行定位的,但是,定位原理各不相同。這幾款系統都已運用醫院、監獄、學校、企業廠房中,但是,它們的定位原理不太適用于煤礦井下狹長的巷道中。
由于煤礦井下巷道的狹長特點,部署有無線信號的電磁環境也因信號的多徑效應、駐波等影響變得復雜而無規律。正因為巷道的信道模型復雜,巷道中人員定位的問題也一直是研究的熱點。根據井下巷道的特點,我們提出一種適用于煤礦井下的一種定位算法。本文在第1部分介紹了卡爾曼濾波及射頻指紋定位算法,第2部分詳細介紹了煤礦的環境特征及提出的定位算法,第3部分對提出的定位算法進行了實驗,最后進行了總結。
1 基于RSS的定位算法
1.1 卡爾曼濾波算法(Kalman Filter Algorithm)
卡爾曼濾波算法[7-9]用來濾除接收信號強度的噪聲,將接收的信號的作為一個離散的系統,沒有控制量。可以用下面兩式來描述:
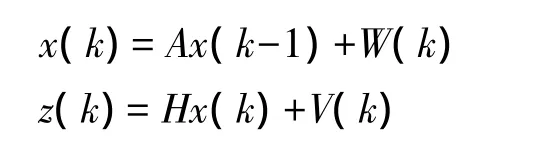
上兩式中,x(k)是k時刻的經過濾波后的接收信號強度值。A是系統參數此處取1,對于多模型系統為矩陣。z(k)是k時刻的測量的接收信號強度值,H是測量系統的參數此處取1,對于多測量系統,H為矩陣。W(k)和V(k)分別表示過程和測量的噪聲。假設成高斯白噪聲(White Gaussian Noise),他們的協方差(Covariance)分別是Q,R。
首先用系統的過程模型,來預測下一狀態的系統。假設現在的系統狀態是k,根據系統的模型,可以基于系統的上一狀態而預測出現在狀態:

式(1)中x(k-1|k-1)是上一狀態最優的結果。更新對應于x(k|k-1)的協方差用P表示:

式(2)中,P(k|k-1)是 x(k|k-1)對應的協方差,P(k-1|k-1)是 x(k-1|k-1)對應的協方差。結合預測值和測量值,得到現在狀態的最優化估算值x(k|k):

其中Kg(k)為當前時刻的卡爾曼增益(Kalman Gain):
更新k狀態下x(k|k)的協方差:

其中I為1的矩陣,對于此處I=1。
在距離接入點20 m處進行采樣,在采樣過程中對定位卡遮擋產生噪聲,每秒采樣1次,采集50 s,結果如圖1中(a)所示,圖1中(b)是經過卡爾曼濾波后的結果。
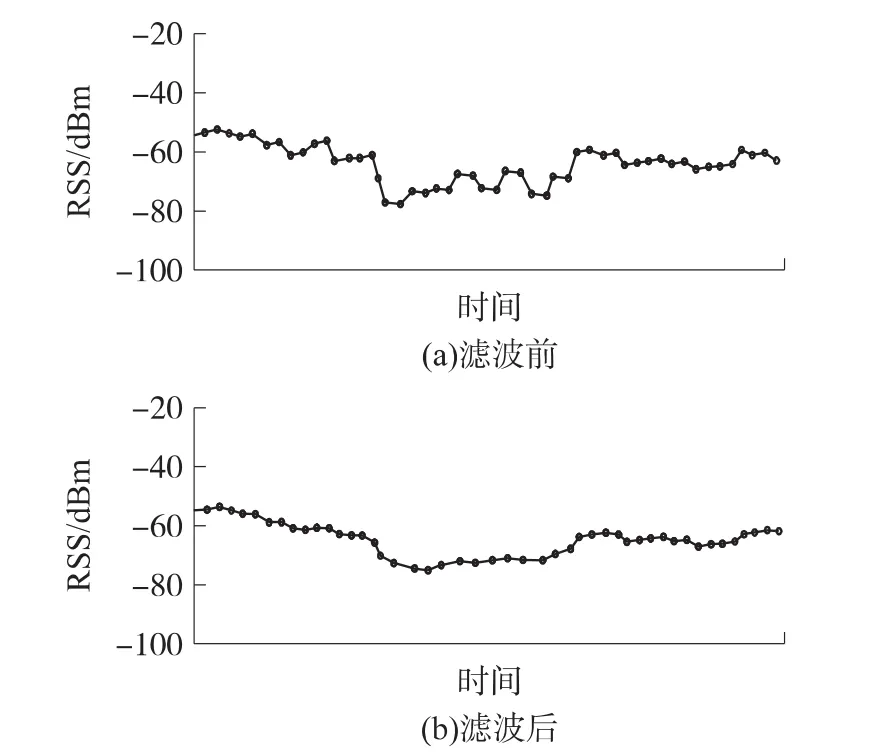
圖1 卡爾曼濾波前后比較
1.2 射頻指紋定位算法
射頻指紋定位算法[10]的定位過程分為訓練采樣與定位兩個階段[11]。在訓練采樣階段,首先,根據需要確定要進行定位的區域,將定位區域按照規定的大小劃分為若干網格。其次,確定坐標原點,確定位置坐標,在劃分好的網格位置坐標處用定位卡采集周圍接入點AP(Access Point)信號強度值,將采集的數據根據AP的MAC地址存入相應的位置數據庫。為了提高采集的信號強度值的可信度,通常采用卡爾曼濾波或多次測量取平均值的方法,還可以根據信號的衰減模型來修正一些偏差較大的數據。射頻指紋定位算法如圖2所示。
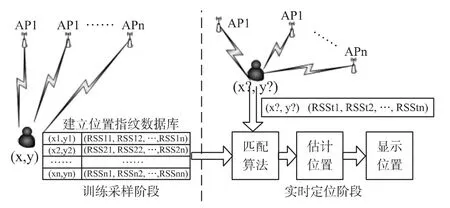
圖2 射頻指紋定位算法
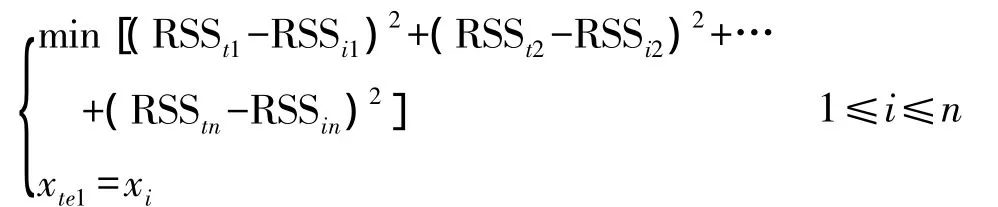
定位階段,定位卡接收實時的AP信號強度值,根據建立的數據庫依據一定的匹配算法估計出定位卡的當前位置。常用的匹配算法有最鄰近法、K鄰近法[12-13]、神經網絡等。本文使用 K 鄰近法,取 K=4,換言之,使用與定位點信號強度的均方誤差(RSSt1-RSSi1)2+(RSSt2-RSSi2)2+…+(RSStn-RSSin)2最小的四個點 xte1,xte2,xte3,xte4進行求平均,這個平均位置就是測試點的估計位置xte。
再依次計算 xte2,xte3,xte4得到 xte:
2 環境特征及定位算法
2.1 環境特征
在煤礦環境中,AP作為信標節點是沿巷道直線分布的,需要定位的目標稱為未知節點,在煤礦特定的環境下未知節點有以下兩個基本的特征:
特征1 路徑呈直線性 由于巷道的長度長達幾百米甚至幾千米,而巷道的寬度一般是4 m~5 m,高度在2 m~4 m左右,并且巷道岔口不多,大致呈直線性。在這種特殊的環境中我們可以忽略其寬度和高度影響,將信標節點和未知節點的位置都投影到巷道中線上,定位目標位置一維,降低了定位復雜度。巷道環境人員定位場景如圖3所示。
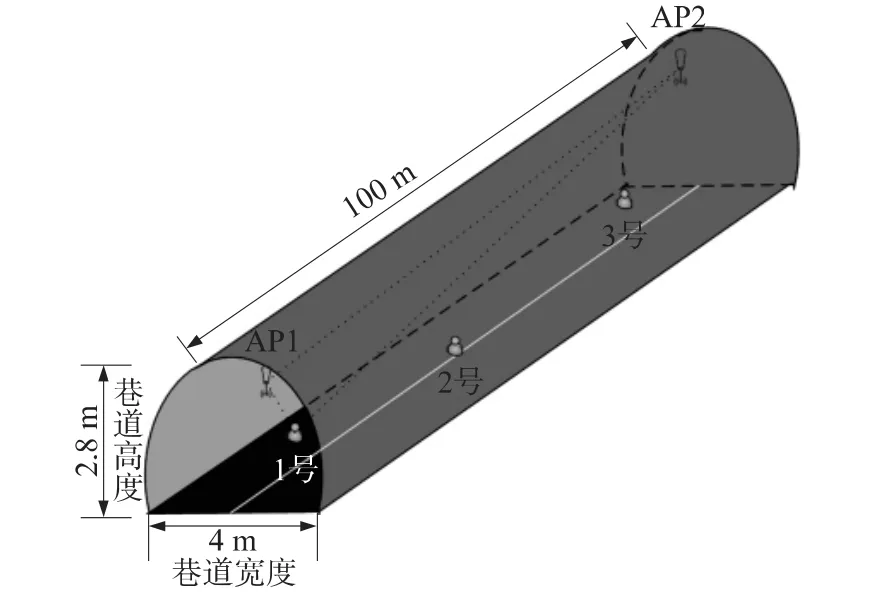
圖3 巷道環境人員定位場景
特征2 定位目標移動規律 對于相對固定的未知節點,由于沒有移動過程中的干擾,接收的信號強度值的波動較小,可信度高。而巷道中的主要的移動和定位目標是人員和機車,人正常步行速度一般小于3 m/s,約等于1.5 m/s,機車的行駛速度一般小于9 m/s,移動速度相對較慢。
2.2 定位算法的原理
以射頻指紋算法為基礎,結合巷道的環境特征對定位算法進行了改進,在訓練采樣階段對接收的信號強度進行了卡爾曼濾波,把一些離奇的數據摒棄掉,可提高匹配算法的速率,在一定程度上可提高定位精度。在實時定位階段,在AP附近位置,把定位目標的位置估計到AP所在處,在AP與AP之間時,根據接收的信號強度值和數據庫匹配計算得出位置,還有一個補償算法是前后兩次定位的位置不能超過10 m,大大提高了定位精度。具體算法流程如圖4所示。
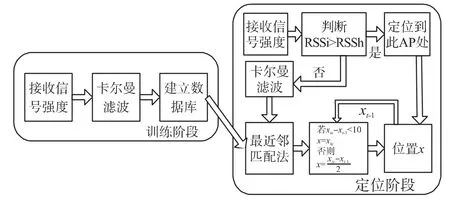
圖4 提出的定位算法過程
(1)根據無線信號的傳播模型[14]與實測的定位卡的接收信號強度值的結果(如圖5)可知,在距離AP的0~5 m范圍內隨距離的增加信號強度值下降很快,并且成線性的特性。根據這一特性,將在距接入點3 m處接收到的信號強度值設定為閾值RSSh,若定位卡在某一時刻接收的所有的AP的信號強度值中有AP的信號強度值大于此閾值,再根據特征一可以知道這樣的AP有且僅有一個,則將定位卡定位為該AP的坐標。可以用數學公式表示為:
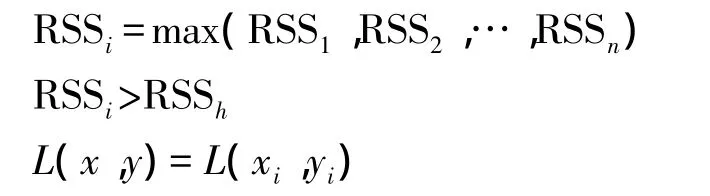

圖5 接收信號強度隨距離變化曲線
(2)若RSSi>RSSh不成立,就跳過進入下一步,對接收的RSS進行卡爾曼濾波,濾波后的信號強度記作向量RSSk,此時觀測到的AP的集合為A,濾波后進行AP選擇,選擇后的AP的集合為A',再根據最近鄰法求從數據庫中得到當前估計位置L(xte,yte)。再根據特征2,井下移動目標的速度 v<10 m/s,若上一秒的位置 x(t-1)與當前估計位置 L(xte,yte)的差小于10 m,x=xte。否則,取上一時刻的坐標x(t-1)與當前時刻的估計坐標xte的均值,若此時的差仍然大于10m則繼續取均值。在此過程中肯定會帶來誤差的積累,所以第1步的作用就很關鍵,每隔一段距離就可以根據第1步進行一次校準來消除積累誤差。可用以下公式來描述:
根據射頻指紋算法得出xte
3 實驗結果及誤差分析
為了驗證算法的性能,在實驗樓的樓道間進行了實驗。如圖5所示,在一個長60 m,寬2 m,高3 m的走廊中布置兩個AP,AP安裝在高3 m的天花板上。在采樣階段[14],我們是在寬2 m樓道的橫向中線上每隔2 m進行信號強度采樣,建立位置數據庫。在實時定位階段,一位攜帶定位卡的測試人員在走廊中正常走動。定位算法在上位機中實現,此處用java編寫了一個簡單的定位引擎,顯示效果如圖6所示。

圖6 定位引擎顯示效果
在采樣階段,我們是在樓道的中線上進行的,所以在實際定位階段,人員的估計位置不管是否偏離中線,都會被定位到樓道中線的某處,這一思想主要是根據煤礦井下巷道狹長的特點而提出的。在實驗中,用來實現定位的實際位置的RSS值是在每隔5 m處測量一次,并且偏離中線,符合煤礦巷道人員行走過程中的隨機分布性。實際位置的RSS信息經由本文中的定位算法計算定位之后得出估計位置。實驗后的實際位置與估計位置結果如圖7所示。
圖7 實際位置與估計位置比較
煤礦井下的AP信號強度的變化雖然受多徑效應、駐波等影響,但是變化大趨勢還是呈對數分布。從我們多次測試的結果可以總結出,在AP附近,定位精度較高,而在AP與AP之間的位置,定位精度較差。但是,從圖7可以看出,第7個測試點的定位誤差只有3 m,這是我們算法中的估計位置之間不能超過10 m,若超過10 m,啟用補償算法,把估計位置設置到間隔10 m內。在第10個測試點定位誤差較小,可以看出,在AP附近的點,會被定位到離AP最近的位置。從圖8中可以知道最大誤差9 m,經過計算這12個點的平均誤差為4m,對于煤礦井下巷道都在幾千米以上,寬度在4 m左右,這樣的定位精度在煤礦井下還是很高的,是完全可以接受的。
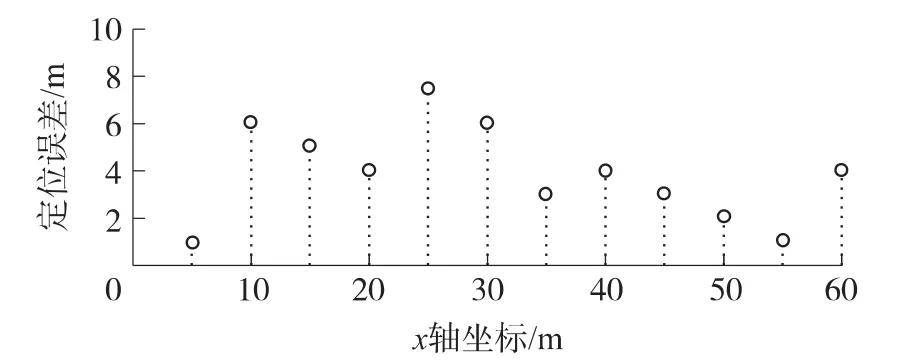
圖8 定位誤差
4 結論
本文介紹了基于接收信號強度值的射頻指紋定位算法,結合煤礦環境特征對其進行了改進。改進后的定位算法提高了未知節點在AP附近的可信度,并減弱了環境對接收信號強度值的影響,解決了未知節點由于人體遮擋等因素引起的未知節點大幅度跳動現象,提高了定位精度。分析實驗結果得出,定位平均誤差4 m,最大定位誤差9 m,最小誤差可達到1 m,在井下巷道這樣的定位精度完全可以接受。在實驗階段中發現在某些時刻不能接收到未知節點的信號強度值,一定程度上影響了定位的結果,這將是我們下一步的主要研究內容。
[1] 孫利民,李建中.無線傳感器網絡[M].北京:清華大學出版社,2005.
[2] Xiaoxin Xu,Mingguang Wu,Cheng Ding,et al.Outdoor Wireless Healthcare Monitoring System for Hospital Patients based on ZigBee[J].IEEE Conference on Industrial Electronics and Applicationsis,2010,5(5):549-554.
[3] S.Woo S Jeong,L Xia etal.Application of WiFi-Based Indoor Positioning System for Labor Tracking at Construction Sites:A Case Study in Guangzhou MTR,2011,1(10):3-13.
[4] 史大偉,何繼蘭.煤礦井下人員定位系統關鍵技術探討[J].煤礦機械,2010,9(3):82-84.
[5] Kaveh Pahlavan,Xinrong Li,Juha-Pekka Makela.Indoor Geolocation Science and Technology[J].IEEE Communications Magazine,2002,12(6):112-118.
[6] Kevin Curran,Eoghan Furey,Tom Lunney,et al.An Evaluation of Indoor Location Detaermination Technologies[J].Journal of Location Based Service,2011,2(5):61-78.
[7] Sreenath K,Lewis F L,Popa D O.Simultaneous Adaptive Localization of a Wireless Sensor Network[J].Mobile Computing and Communications Review,2007,11(5):14-28.
[8] Yim J,Park C,Joo J.Extended Kalman Filter for Wireless LAN Based Indoor Positioning[J].Decision Support Systems,2008,45(4):960-971.
[9] 孟文超,俞立,董齊芬等.基于最優信標組的擴展卡爾曼定位算法[J].傳感技術學報,2010,4(5):581-586.
[10] Salvatore Cavalieri.WLAN-Based OutdoorLocalization using Pattern Matching Algorithm[J].International Journal of Wireless Information Networks,2007,14(4):265-279.
[11] 張明華.基于WLAN的室內定位技術研究[D].上海:上海交通大學圖書館,2009.
[12] Bahl P,Padmanabhan V N.RADAR:An In-Building RF-Based Location and Tracking System[C]//Proceedings of the IEEE Infocom,Tel-Aviv,Israel:2000,2(9)775-784.
[13] Kushki A,Plataniotis K N,Venetsanopoulos A N.Kernel-Based Positioning in WirelessLocalArea Networks[J].IEEE Transactions on Mobile Computing,2007,6(6):689-705.
[14] 田增山,羅磊,何維.一種分布式的無線傳感器網絡節點定位算法[J].傳感技術學報,2009,22(3):387-390.
猜你喜歡
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
工業設計(2016年4期)2016-05-04 04:00:23
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
電子設計工程(2015年13期)2015-02-27 12:06:43
河南科技(2014年8期)2014-02-27 14:08:07
