基于梯度下降法的風(fēng)力機(jī)特性模擬研究
2012-06-01 05:50:40韓肖清
山西電力 2012年5期
關(guān)鍵詞:風(fēng)速
韓肖清,董 升
(太原理工大學(xué)電氣與動(dòng)力工程學(xué)院,山西 太原 030024)
基于梯度下降法的風(fēng)力機(jī)特性模擬研究
韓肖清,董 升
(太原理工大學(xué)電氣與動(dòng)力工程學(xué)院,山西 太原 030024)
建立了風(fēng)力機(jī)運(yùn)行特性的數(shù)學(xué)模型,在此基礎(chǔ)上創(chuàng)建了風(fēng)力機(jī)模擬系統(tǒng)。通過(guò)對(duì)比風(fēng)力機(jī)與直流電動(dòng)機(jī)模型的異同以及運(yùn)行特性的相似性,提出基于BUCK斬波電路的直流電動(dòng)機(jī)電流閉環(huán)控制系統(tǒng)的模型,并進(jìn)行仿真分析。仿真結(jié)果表明,采用梯度下降法的自適應(yīng)PI控制的風(fēng)力機(jī)特性的模擬,比傳統(tǒng)PI控制具有更高的精度及更快的響應(yīng)速度,可方便應(yīng)用于實(shí)驗(yàn)室環(huán)境下風(fēng)力發(fā)電技術(shù)的研究。
風(fēng)力發(fā)電;特性模擬;梯度下降法的自適應(yīng)PI控制;BUCK電路
0 引言
風(fēng)能是一種取之不盡、清潔無(wú)污染的“綠色能源”。近年來(lái),風(fēng)力發(fā)電技術(shù)得到飛速的發(fā)展,并得到廣泛的應(yīng)用[1]。為詳細(xì)研究風(fēng)力發(fā)電技術(shù),將風(fēng)力機(jī)與發(fā)電機(jī)直接連接,現(xiàn)場(chǎng)做試驗(yàn)是較理想的方法。但是國(guó)內(nèi)多數(shù)實(shí)驗(yàn)室還沒(méi)有風(fēng)力機(jī)或風(fēng)電場(chǎng),因此,如何在實(shí)驗(yàn)室條件下模擬風(fēng)力機(jī)特性,是深入研究風(fēng)力發(fā)電技術(shù)的前提,具有重要的現(xiàn)實(shí)意義。目前,風(fēng)力機(jī)模擬系統(tǒng)的相關(guān)研究逐漸增多,根據(jù)所采用電機(jī)的不同,可將風(fēng)力機(jī)模擬系統(tǒng)分為直流電動(dòng)機(jī)[1-5]、異步電動(dòng)機(jī)[6-8]和永磁同步電動(dòng)機(jī)[9]三類。文獻(xiàn)[2]采用直流電動(dòng)機(jī)來(lái)模擬風(fēng)力機(jī)的轉(zhuǎn)速-功率特性,但是僅僅局限于風(fēng)速不變的情況,考慮到風(fēng)的隨機(jī)變化性,不能真實(shí)地反映風(fēng)力機(jī)的輸出特性。文獻(xiàn)[6]采用異步電動(dòng)機(jī)模擬風(fēng)力機(jī)特性,但未考慮增速齒輪箱的影響,也未考慮隨機(jī)風(fēng)速下風(fēng)力機(jī)輸出特性。由于直流電動(dòng)機(jī)是最成熟的調(diào)速電機(jī),其勵(lì)磁和電樞反應(yīng)磁場(chǎng)物理上相互垂直,勵(lì)磁和轉(zhuǎn)矩參數(shù)自然實(shí)現(xiàn)解耦,控制簡(jiǎn)單,調(diào)速性能較好,故本文選用直流電動(dòng)機(jī)作為原動(dòng)機(jī)來(lái)模擬風(fēng)力機(jī),運(yùn)用自適應(yīng)PI控制法控制風(fēng)力機(jī)特性的模擬,在Simulink環(huán)境下建立了含風(fēng)速恒定和風(fēng)速變化的仿真模型,驗(yàn)證了模擬系統(tǒng)的實(shí)際運(yùn)行效果。
1 風(fēng)力機(jī)的運(yùn)行特性分析
根據(jù)空氣動(dòng)力學(xué)知識(shí),風(fēng)力機(jī)的輸入功率用公式(1) 表示。

式中:ρ為空氣密度,一般為1.225kg/m3;S為風(fēng)力機(jī)葉片旋轉(zhuǎn)面的面積,單位為m2;R為葉片半徑,m;V為風(fēng)速,m/s。
風(fēng)力機(jī)的輸出機(jī)械功率表示為

風(fēng)能利用系數(shù)CP是槳葉吸收的機(jī)械能與通過(guò)槳葉旋轉(zhuǎn)面的全部風(fēng)能的比例[10],它與葉片轉(zhuǎn)速、葉片半徑、風(fēng)速、槳葉節(jié)距角均有關(guān)系。因此,定義葉尖速比λ,即葉片尖端線速度與風(fēng)速之比,為

風(fēng)力機(jī)可分為變槳距和定槳距兩種。變槳距風(fēng)機(jī)特性可由一簇風(fēng)能利用系數(shù)曲線表示。因此,風(fēng)能利用系數(shù)CP是葉尖速比和槳葉節(jié)距角的函數(shù),即CP(λ,β)。
根據(jù)數(shù)值近似計(jì)算的方法,得出CP的計(jì)算公式[1 1]為
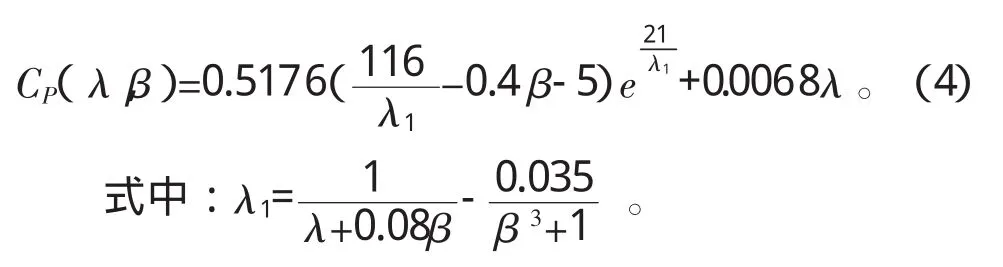
圖1為在一定風(fēng)速下,槳距角β為00時(shí),風(fēng)能利用系數(shù)和葉尖速比關(guān)系曲線圖。
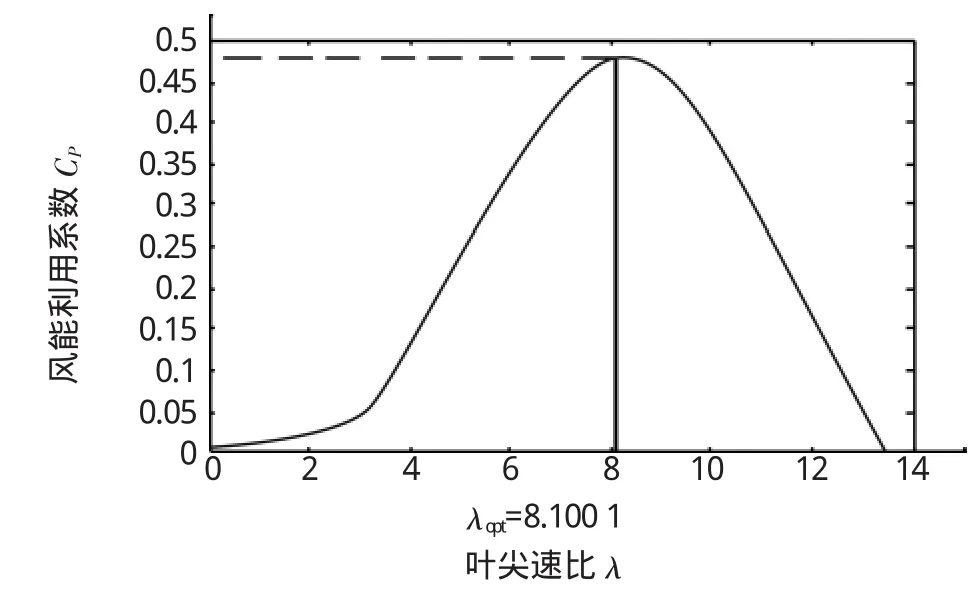
圖1 風(fēng)能利用系數(shù)-葉尖速比曲線
由圖1可知,當(dāng)槳距角給定時(shí),總有一個(gè)對(duì)應(yīng)著最佳風(fēng)能利用系數(shù)CP,max的最佳葉尖速比,使風(fēng)力機(jī)吸收的風(fēng)能最大。因此,當(dāng)風(fēng)速變化時(shí),只需調(diào)節(jié)轉(zhuǎn)速ω使最佳葉尖速比λ保持不變,即可獲得最佳的風(fēng)能利用系數(shù)CP,max。
2 直流電動(dòng)機(jī)模擬風(fēng)力機(jī)的運(yùn)行機(jī)理
2.1 風(fēng)力機(jī)模型的建立
風(fēng)力機(jī)模擬系統(tǒng)應(yīng)按照給定風(fēng)輪的轉(zhuǎn)矩、轉(zhuǎn)速及風(fēng)速的關(guān)系輸出機(jī)械功率。因此,風(fēng)力機(jī)模擬系統(tǒng)涉及轉(zhuǎn)矩與轉(zhuǎn)速關(guān)系和動(dòng)態(tài)變化兩方面的問(wèn)題,對(duì)于風(fēng)力機(jī)特性的模擬,關(guān)鍵在于使模擬系統(tǒng)輸出的轉(zhuǎn)矩與轉(zhuǎn)速的關(guān)系符合風(fēng)力機(jī)的運(yùn)行特性。因此,本文在分析風(fēng)力機(jī)運(yùn)行原理基礎(chǔ)上,建立了轉(zhuǎn)矩系數(shù)-葉尖速比(CT-λ)曲線的風(fēng)力機(jī)模型(見(jiàn)表1)。
定槳距運(yùn)行時(shí),設(shè)槳距角β為0°,此時(shí)

式中:CT(λ)為轉(zhuǎn)矩系數(shù)。
本文建立了一個(gè)1 0次多項(xiàng)式函數(shù)模擬實(shí)測(cè)風(fēng)力機(jī)CT-λ曲線,即

CT-λ曲線如圖2所示。
2.2 直流電動(dòng)機(jī)特性
計(jì)及摩擦阻力矩和粘滯摩擦阻力時(shí),直流電動(dòng)機(jī)的動(dòng)態(tài)特性方程見(jiàn)公式(7)。
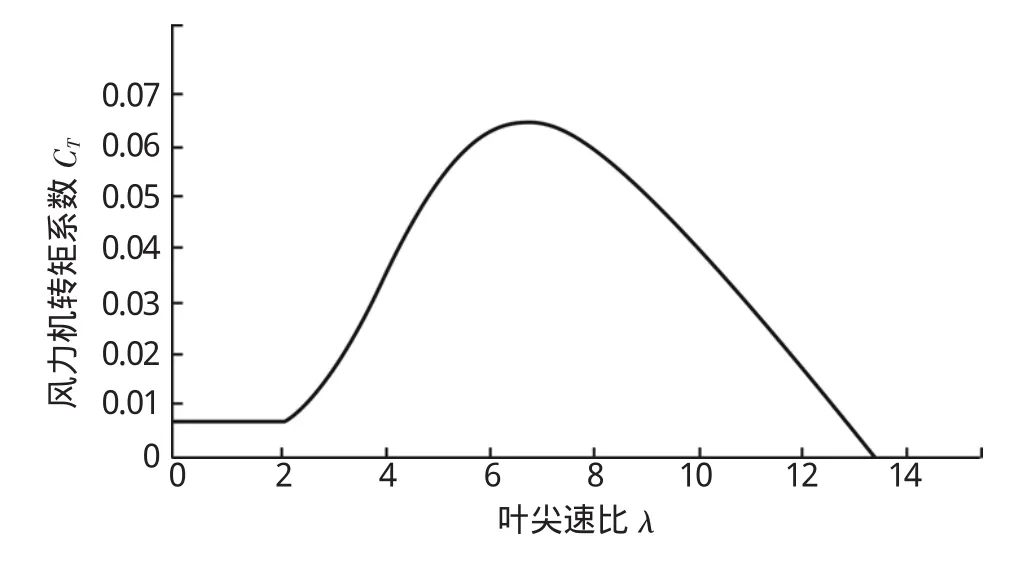
圖2 風(fēng)力機(jī)轉(zhuǎn)矩系數(shù)CT-λ曲線

表1 風(fēng)力機(jī)模型參數(shù)
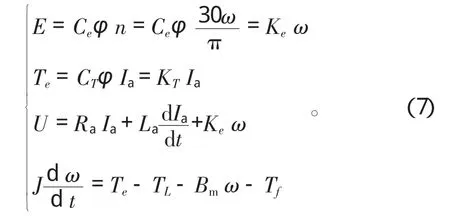
式中:Ke、KT為直流電動(dòng)機(jī)的電動(dòng)勢(shì)系數(shù)和轉(zhuǎn)矩系數(shù);ω為轉(zhuǎn)子角速度;Ia為電樞電流;φ為勵(lì)磁磁通;E為反電動(dòng)勢(shì);U為電樞電壓;Te為電磁轉(zhuǎn)矩;TL為負(fù)載轉(zhuǎn)矩;Tf為摩擦阻力矩;Bm為粘滯摩擦系數(shù);Ra、La為電樞繞組的電阻和電感;J為直流電動(dòng)機(jī)轉(zhuǎn)動(dòng)慣量。
穩(wěn)態(tài)下直流電動(dòng)機(jī)輸出轉(zhuǎn)矩的特性為


忽略電樞反應(yīng),假設(shè)磁通φ不變,說(shuō)明Te與U、ω有關(guān),即Te=f(U,ω)。當(dāng)U不變時(shí),Te與ω成線性關(guān)系,連續(xù)改變U時(shí),可得一簇平行的直線。
穩(wěn)態(tài)運(yùn)行時(shí)直流電動(dòng)機(jī)輸出機(jī)械功率的特性為,帶入式(8) 得

由此可見(jiàn),通過(guò)調(diào)節(jié)電動(dòng)機(jī)電樞電壓U,可以使其輸出機(jī)械功率和轉(zhuǎn)速滿足風(fēng)力機(jī)系統(tǒng)的功率-轉(zhuǎn)速關(guān)系。
2.3 基于梯度下降法的自適應(yīng)PI控制
PI控制器根據(jù)給定值與實(shí)際輸出值構(gòu)成控制偏差e(t),從而針對(duì)控制偏差進(jìn)行比例、積分調(diào)節(jié),其連續(xù)形式為

式中Kp、Ki分別為比例系數(shù)和積分系數(shù)。
采用梯度下降的自適應(yīng)P I控制法的結(jié)構(gòu)圖如圖3所示。首先定義偏差函數(shù)e=i*-i,假設(shè)比例環(huán)節(jié)、積分環(huán)節(jié)的輸出分別為y1、y2,整個(gè)控制器的輸出為u,準(zhǔn)則函數(shù)為

根據(jù)梯度下降法可知

式中:K={Kp1,Ki1}且 α≥0。

具體結(jié)構(gòu)圖如圖3所示。
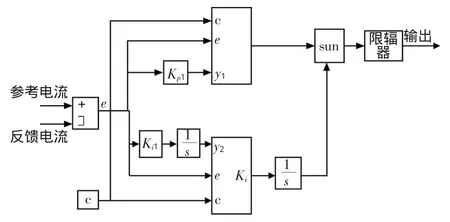
圖3 梯度下降法自適應(yīng)P I控制結(jié)構(gòu)圖
2.4 風(fēng)力機(jī)的直流電動(dòng)機(jī)模擬方案
風(fēng)力機(jī)正確的模擬思路應(yīng)是根據(jù)當(dāng)前風(fēng)速計(jì)算出風(fēng)力機(jī)的輸出功率或轉(zhuǎn)矩,再根據(jù)最大風(fēng)能捕獲,確定相應(yīng)的轉(zhuǎn)速,并將它們作為直流電動(dòng)機(jī)的控制指令加以執(zhí)行,如圖4所示。
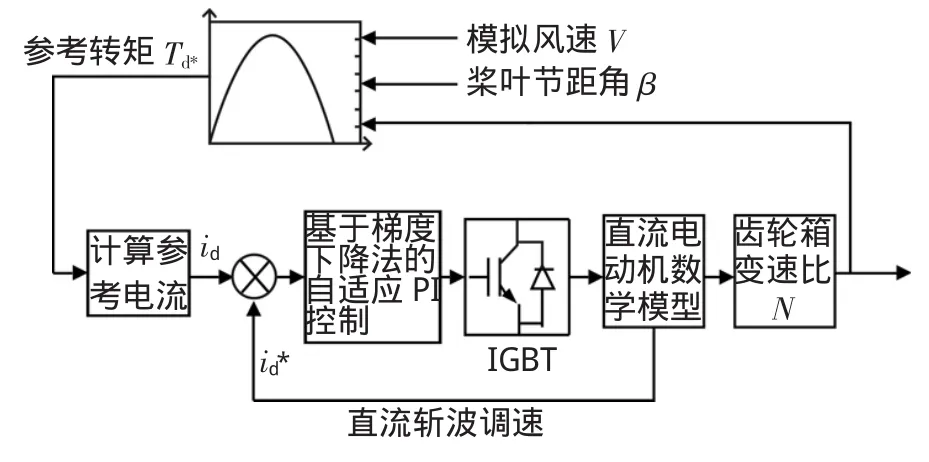
圖4 風(fēng)力機(jī)特性模擬控制框圖
直流電動(dòng)機(jī)模擬風(fēng)力機(jī)特性就是通過(guò)調(diào)節(jié)直流電動(dòng)機(jī)的電樞電壓,使直流電動(dòng)機(jī)特性曲線與風(fēng)力機(jī)特性曲線相交,進(jìn)而可以連續(xù)地得到風(fēng)力機(jī)特性曲線上的每一個(gè)點(diǎn)。
3 仿真實(shí)驗(yàn)
通過(guò)以上描述,在Simulink環(huán)境下實(shí)現(xiàn)基于直流電動(dòng)機(jī)的風(fēng)力機(jī)轉(zhuǎn)矩特性模擬系統(tǒng),首先根據(jù)風(fēng)速和風(fēng)力機(jī)轉(zhuǎn)速及槳距角計(jì)算出風(fēng)力機(jī)參考轉(zhuǎn)矩;然后進(jìn)行直流電動(dòng)機(jī)的電流閉環(huán)控制,控制指令為轉(zhuǎn)矩,控制變量是電流;再計(jì)算直流電動(dòng)機(jī)的數(shù)學(xué)模型,求取轉(zhuǎn)矩和轉(zhuǎn)速的響應(yīng),控制輸入。模擬風(fēng)力機(jī)參數(shù):額定功率3kW,最大風(fēng)能系數(shù)為0.48,最佳葉尖速比為8.1001,葉片半徑為4.3m,變速比N=8.72。
模擬系統(tǒng)的最終目的是能夠使直流電動(dòng)機(jī)的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線,跟蹤風(fēng)力機(jī)的特性曲線。因此,本文采用以下三種方案進(jìn)行風(fēng)力機(jī)特性的模擬(仿真中電機(jī)參數(shù):PK=3kW,nN=1220rpm,UN=240V,IN=23.5A,Ra=0.6Ω,Uf=240V,If=120H,J=0.2kg·m2,Tf=1.1N·m,Bm=0.004N·m·s,Rf=240Ω,La=0.0012H,Laf=1.8H)。
a)風(fēng)速恒定的情況。圖5為風(fēng)速恒定條件的轉(zhuǎn)矩-轉(zhuǎn)速圖。圖中各實(shí)線表示風(fēng)速分別為6m/s、7.5m/s、9m/s和10.5m/s情況下的風(fēng)力機(jī)轉(zhuǎn)矩-轉(zhuǎn)速特性曲線。將該曲線與模擬系統(tǒng)模擬的特性曲線進(jìn)行對(duì)比,可以看出,模擬效果良好,誤差較小。
b)風(fēng)速變化的情況。圖6為風(fēng)速變化時(shí)的轉(zhuǎn)矩-轉(zhuǎn)速圖。圖中風(fēng)速?gòu)?0.5m/s突變到9m/s,再?gòu)?m/s突變到7.5m/s,由圖6看出風(fēng)速變化時(shí)模擬轉(zhuǎn)矩能較好地跟蹤風(fēng)力機(jī)輸出轉(zhuǎn)矩,但是有一定誤差。
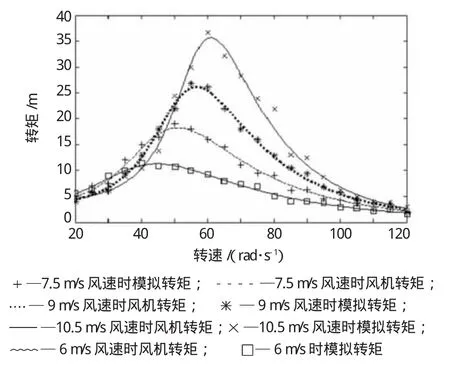
圖5 定風(fēng)速下模擬系統(tǒng)的轉(zhuǎn)矩-轉(zhuǎn)速曲線
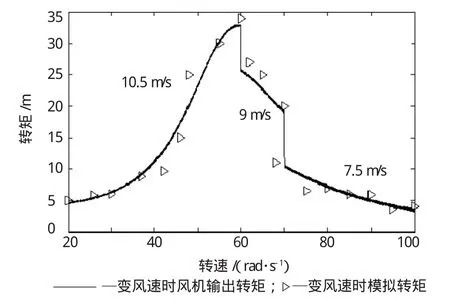
圖6 變風(fēng)速下的轉(zhuǎn)矩-轉(zhuǎn)速特性曲線
c)基于梯度下降的自適應(yīng)PI控制。圖7分別表示采用梯度下降的自適應(yīng)PI控制算法和僅僅采用PI控制算法時(shí)風(fēng)力機(jī)模擬系統(tǒng)的輸出特性曲線,結(jié)果顯示,采用梯度下降的自適應(yīng)PI控制算法時(shí)輸出轉(zhuǎn)矩能較好地跟蹤風(fēng)力機(jī)輸出特性曲線。
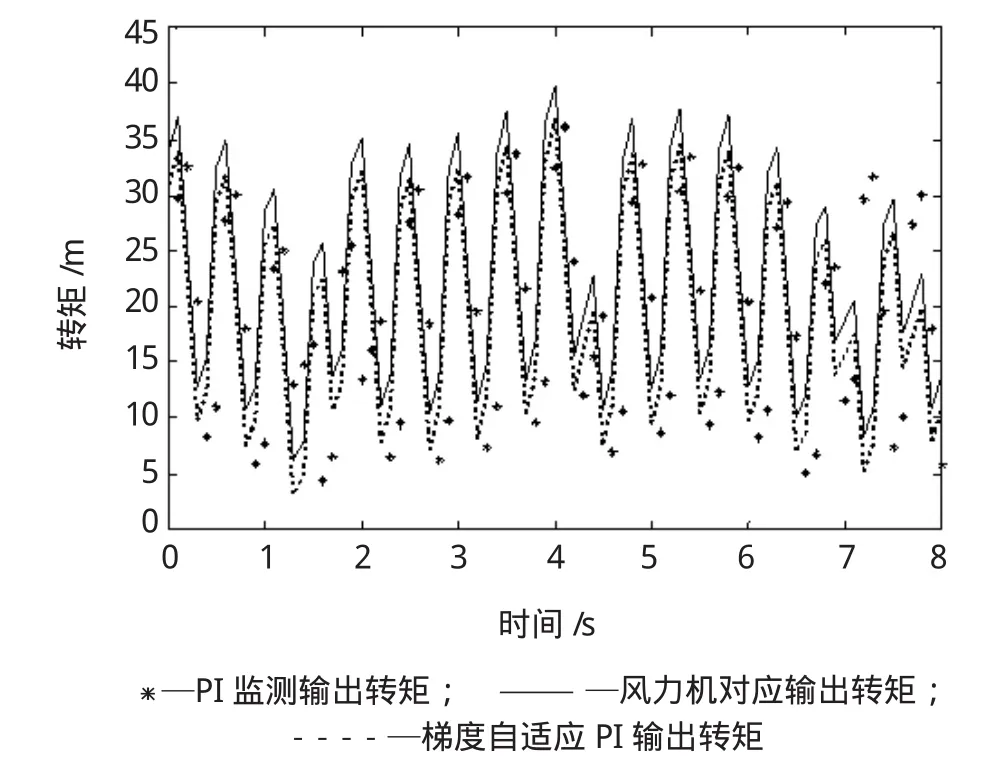
圖7 變風(fēng)速下轉(zhuǎn)矩跟蹤曲線
4 結(jié)論
本文所采用的模擬方案簡(jiǎn)單、易行,轉(zhuǎn)矩響應(yīng)速度快,穩(wěn)定性好,說(shuō)明本文搭建的風(fēng)力機(jī)模擬系統(tǒng)是可行的。基于直流電機(jī)的風(fēng)力機(jī)模擬方法,可為在實(shí)驗(yàn)室環(huán)境下進(jìn)一步地研究風(fēng)力發(fā)電系統(tǒng)提供基礎(chǔ)。
[1] 劉其輝,賀益康,卞松江.變速恒頻風(fēng)力發(fā)電機(jī)空載并網(wǎng)控制研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2004,24(3):6-11.
[2] 黃海,康勇,柳彬.風(fēng)力機(jī)特性的直流電機(jī)模擬[J].電機(jī)電器技術(shù),2005(2):50-51.
[3] Li Wei wei,Xu Dianguo,Zhang Wei,et al.Research on wind turbine emulation based on DC motor[C].2nd IEEE Conference on Industrial Electronics and Applications.Harbin,China:IEEE,2007:2589-2593.
[4] 卞松江,潘再平,賀益康.風(fēng)力機(jī)特性的直流電機(jī)模擬[J].太陽(yáng)能學(xué)報(bào),2003,24(3):360-364.
[5] 馬洪飛,張薇,李偉偉,等.基于直流電機(jī)的風(fēng)力機(jī)模擬技術(shù)研究[J].太陽(yáng)能學(xué)報(bào),2007,28(11):1278-1283.
[6] 吳捷,許燕灝.基于異步電動(dòng)機(jī)的風(fēng)力機(jī)風(fēng)輪動(dòng)態(tài)模擬方法[J].華南理工大學(xué)學(xué)報(bào)(自然科學(xué)版),2006,33(6):46~49.
[7] 喬明,林飛,孫湖,等.基于異步電機(jī)的風(fēng)力機(jī)模擬實(shí)驗(yàn)平臺(tái)的研究[J].電氣傳動(dòng),2009,39(1):40-43.
[8] 陳彬,宋平崗,何鑫.基于直接轉(zhuǎn)矩控制的風(fēng)力機(jī)模擬器研究[J].防爆電機(jī),2007,42(137):18-21.
[9] 賈要勤,曹秉剛,楊仲慶.風(fēng)力機(jī)模擬平臺(tái)的MPPT快速響應(yīng)控制方法[J].太陽(yáng)能學(xué)報(bào),2004,25(3):364-370.
[10]倪受元.風(fēng)力機(jī)的工作原理和氣動(dòng)力特性[J].太陽(yáng)能,2000(3):12-16.
[11]P K Sinha.Electromagnetic suspension:Dynamics and control[J].IEE control engineering series,1986(30):52.
Simulation of the Characteristics of Wind Turbine Based on Gradient Descent
HAN Xiao-qing,DONG Sheng
(College of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan,Shanxi030024,China)
It realized the mathematic model for acquiring the operation characteristics of wind turbine,and based on this model,it established the simulation system of wind turbine.By contrasting the differences and similarities of wind turbine and the model of DC motor and the similarities of their operational characteristic,this paper put forward the model of current closed-loop control system based on BUCK chopper circuit.Simulation experiments were carried out,and the result indicated that wind turbine simulation by adopting gradient descent based adaptive PI control is more accurate and responses more quickly than that by the traditional PI control so that the former can be conveniently used in the study of wind power generation in laboratory.
wind power generation;characteristic simulation;gradient descent based adaptive PI control;BUCK circuit
TM310
A
1671-0320(2012)05-0001-04
2012-06-20,
2012-08-03
韓肖清(1964-),女,山西太原人,1985年畢業(yè)于太原工業(yè)大學(xué)電力系統(tǒng)專業(yè),教授,博士生導(dǎo)師,主要研究方向?yàn)殡娏ο到y(tǒng)運(yùn)行與控制、新能源技術(shù);
董 升(1987-),男,2012屆太原理工大學(xué)電力系統(tǒng)及其自動(dòng)化專業(yè),碩士,研究方向?yàn)轱L(fēng)力發(fā)電控制技術(shù)。
猜你喜歡
氣象與環(huán)境科學(xué)(2021年4期)2021-08-27 02:26:12
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中國(guó)電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
風(fēng)能(2016年11期)2016-03-04 05:24:00
電測(cè)與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31