Smith預估在循環流化床協調控制中的應用
2012-06-01 05:50:44賈峰生張魯凡周自強
山西電力 2012年5期
賈峰生,張魯凡,周自強
(1.山西電力科學研究院,山西 太原 030001;2.山西宇翔電力有限責任公司,山西 太原 030001)
Smith預估在循環流化床協調控制中的應用
賈峰生1,張魯凡2,周自強1
(1.山西電力科學研究院,山西 太原 030001;2.山西宇翔電力有限責任公司,山西 太原 030001)
以某電廠210MW機組循環流化床鍋爐為例,對循環流化床機組協調控制系統存在的問題進行了分析,并結合循環流化床鍋爐機組的特性,對所采取的Smith預估器在循環流化床協調控制中的應用進行了詳細的研究和論證。
Smith預估;循環流化床;協調控制
0 引言
循環流化床鍋爐燃燒系統是一個大滯后、強耦合的非線性系統,各個變量之間互相影響。一些被調參數同時受到幾個調節參數的共同影響,如床層溫度要受到給煤量、一次風量、返料量及排渣量等多個參數控制。同時,有的調節參數又影響多個被調參數,如給煤量不僅影響主汽壓力,還影響床溫、爐膛溫度、過量空氣系數等參數。在構造循環流化床鍋爐(CFB)控制方案時只有抓住主要矛盾,同時考慮各個次要矛盾,才能構造出滿足系統要求的控制策略,其自動控制系統需要完成更為復雜的控制任務。由于循環流化床燃燒的復雜性,使得對于煤粉鍋爐行之有效的常規控制方法,已難以實現循環流化床鍋爐的各項控制指標。目前大部分循環流化床的協調控制策略也都是基于煤粉爐的控制思想,本文在此思想的指導下,通過設計主蒸汽壓力預估方案來完善協調控制系統。
1 目前循環流化床鍋爐常規控制策略
1.1 以汽機跟蹤為基礎的協調方式(CTF)
CTF方式是由鍋爐調功、汽機調壓。優點為機組運行穩定,主汽壓力波動小;而缺點是不能利用鍋爐蓄能、負荷響應慢且擾動對功率影響大。從CTF方式負荷試驗調試過程和運行曲線分析,在穩態狀態下,主汽壓力的波動小,而功率的波動則要大;在動態試驗過程中,功率的波動比較大。基于這種特點,機組能夠穩定運行,但是負荷不易控制,且該控制方式也無法滿足電網自動發電控制的要求。
1.2 以鍋爐跟蹤為基礎的協調方式(CBF)
CBF方式由鍋爐調壓、汽機調功。優點為利用鍋爐蓄熱,負荷響應快;缺點為主汽壓波動大,穩定性差。從CBF方式變負荷調試的實際情況看,這種方式的動態過程長且主汽壓力偏差大(常超過1MPa),不利于機組穩定運行,但是從煤粉爐的控制思路來看也大都為這種控制策略。
2 壓力預估協調控制策略
a)大型循環流化床鍋爐汽輪機單元機組是個多變量控制對象,并且機爐的動態特性差異甚大,鍋爐反應滯后相當大。循環流化床燃煤機組協調控制系統(CCS)把鍋爐與汽輪機作為一個整體進行控制,使鍋爐與汽輪機共同承擔發電量控制和主汽壓力穩定任務。由于主汽壓力的大滯后特性,該協調控制的主要任務是壓力保持穩定,尤其是在接近滿負荷時機組的壓力控制問題。
本協調控制綜合了CTF和CBF兩種方式的優點,將機、爐作為一個整體進行控制,在保證機組穩定運行的同時,充分利用蓄能加快負荷響應,機、爐兩側同時調功、調壓;采用Smith主汽壓力預估模式,使機組在滿足負荷調節的要求下,滿足機組壓力的穩定,尤其超壓問題,通過預估壓力精確控制給煤量實現壓力的穩定控制。
b)Smith預估器的工作原理,如圖1所示。
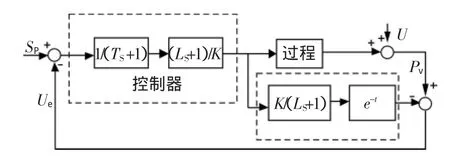
圖1 Smith預估器原理結構圖
Smith預估器使用了帶死區的一價慣性環節近似實際過程,如果過程模型沒有偏差(即過程模型=過程),則過程輸出為

式中:

F——Smith預估結構設計器傳遞函數。
Smith預估器設計思想是:Smith預估器基本是一個超前滯后前饋控制器。它通過從實際測量過程值中減去模型輸出來對擾動進行估算。在實際應用中,模型總是有偏差,LS作為超前滯后控制器的調整參數。它采用過去和未來的輸入輸出信息,根據內部模型,預測系統未來的輸出狀態,經過用模型輸出誤差進行反饋校正以后,再與參考輸入軌跡進行比較,應用二次型性能指標進行滾動優化,然后再計算當前時刻應加于系統的控制動作,完成整個控制循環。由于這種算法的基本思想是:預先估計出控制過程的動態響應,然后由預估器進行補償,力圖使被遲延了t的被調量超前反映到調節器,使調節器提前動作,從而減小超調量,加速調節過程。首先預測系統未來的輸出狀態,再去確定當前時刻的控制動作,即先預測后控制,所以具有預見性。
c)方案設計。循環流化床鍋爐在動態特性上不同于煤粉爐,主要表現在循環流化床鍋爐燃燒室內流化層大熱容量的熱平衡特性,這種特性及其隨運行工況不同而變化的特點,造成了循環流化床鍋爐燃燒過程實現自動控制的困難,在燃料量擾動下,主蒸汽壓力被控對象的特性如圖2所示。在燃料量擾動下,主蒸汽壓力傳遞函數為

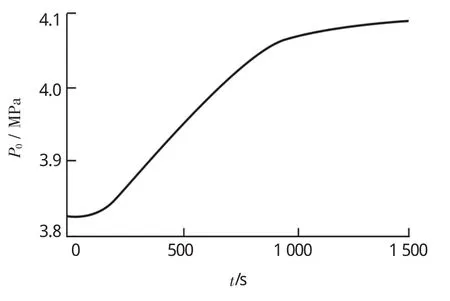
圖2 主汽壓力的燃料量特性曲線
該協調設計利用給煤量對主汽壓力的響應特性:運用Smith預估器輸出壓力如果大于實際壓力則鍋爐輸出增加給煤量,如果Smith預估器輸出壓力小于實際壓力則鍋爐輸出減小給煤量。結構設計如圖3所示。
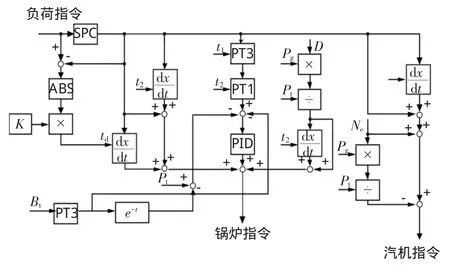
圖3 協調控制原理框圖
穩態下鍋爐主控輸入偏差△e=Pg-(Pt-Bt(K/(1+TS)n)e-ts)-Bt(K/(1+TS)n),由于Bt(K/(1+TS)n)e-ts=Bt(K/(1+TS)n),則△e=Pg-(Pt-Bt(K/(1+TS)n)e-ts)-Bt(K/(1+TS)n)=Pg-Pt=0。
即在穩定過程中鍋爐主控PID輸入為零,機組鍋爐汽機之間形成一個平衡狀態。
動態過程中,由于Pg是隨著負荷指令的變化而變化,但是在變負荷過程中煤量在負荷指令前饋的作用下首先發生變化,這時Bt首先發生變化,由于鍋爐響應滯后比較大,在機組升負荷開始主汽壓力下降,但在模型的作用下只要K值取值比較合適,則

預估準確情況下Pt≈Bt(K/(1+TS)n)e-ts,則

在煤量的變化作用下,偏差△e很快趨于零,鍋爐主控PID不再參與調節,此時煤量在鍋爐主控的作用下只增加負荷變化量對應的應該增加的煤量,而不是在PID的作用下過多地增加煤量,降負荷過程正好與升負荷過程相反。如果沒有此預估信號的存在,則鍋爐主控在PID的作用下指令一直在同一個方向增加或減小,由于鍋爐的大滯后特性,煤量肯定會過調,那么主汽壓力不會穩定,唯一的結果就是壓力不停地擺動。
3 應用效果
該電廠在用常規思路控制之前主汽壓力不易控制,汽機主控調節負荷,雖然負荷能滿足要求,但是汽機調門為了滿足負荷要求不斷調節,這樣主汽壓力不斷擺動,進一步使煤量擺動,主汽壓力偏差較大,而且穩態下也不易穩定,如圖4所示。
在運用了Smith預估主汽壓力后,由于預估作用的存在,使煤量的變化是在一定可控范圍內變化,該變化量滿足負荷的變化,既滿足負荷的變化,而且使主汽壓力波動不太大,如圖5所示。
4 結論
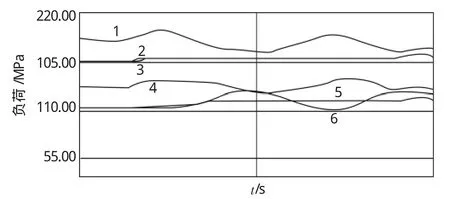
圖4 常規協調控制模式下趨勢圖
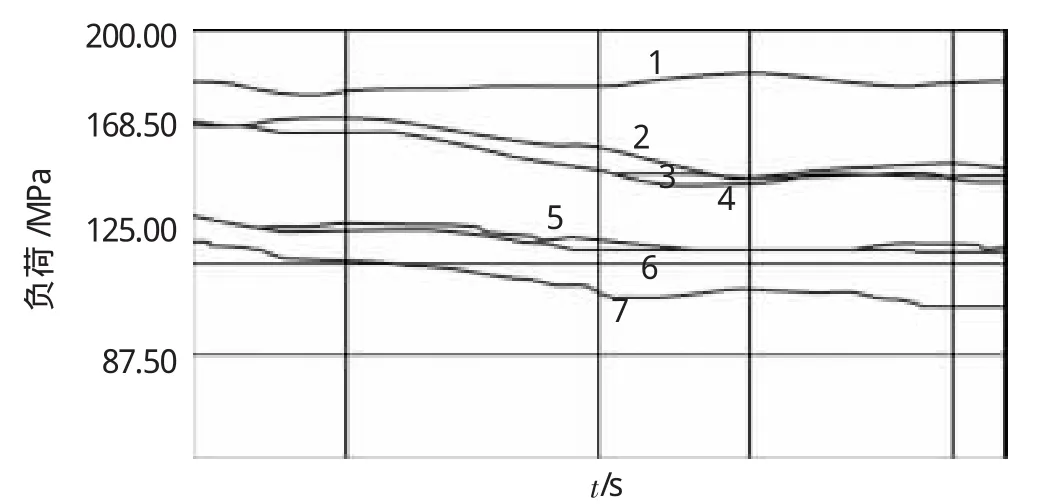
圖5 Smith預估模式下協調控制趨勢圖
該電廠經過投產72h協調控制全部投入,主汽壓力靜態偏差+0.2MPa,動態偏差+0.9MPa,沒有發生鍋爐超壓現象,另外該電廠一次風機和二次風機調節系統都是用液耦調節,液耦調節死區比較大,因此系統在變負荷過程中風量的變化緩慢,如果加大二次風機液耦的調節響應速度,該協調控制主汽壓力響應能力應該更好。但是在機組接近滿負荷時,機組速率必須降低,否則主汽壓力容易超壓,因此,循環流化床鍋爐還是不易滿足電網AGC(自為發電控制)解釋的指標要求,更成熟的控制策略需要在實踐中不斷優化和完善。
The Application of Smith Predictor in Coordinate Control of CFB Boilers
JIA Feng-sheng1,ZHANG Lu-fan2,ZHOU Zi-qiang1
(1.Shanxi Electric Power Research Institute,Taiyuan,Shanxi030001,China;
2.Shanxi Yuxiang Electric Power Co.,Ltd.,Taiyuan,Shanxi030001,China)
This paper analyzes the existing problems on coordinating control system for CFB boiler in a power plant.According to the characteristics of CFB boiler,the application of Smith Predictor in the coordinate control of CFB boiler are studied and demonstrated.
Smith Predictor;CFB Boilers;coordinate control
TK229
B
1671-0320(2012)05-0043-03
2012-06-12,
2012-07-15
賈峰生(1978-),男,山西平遙人,2004年畢業于太原理工大學控制理論控制工程專業,工程師,從事火電機組自動控制系統工作;
張魯凡(1961-),男,山西朔州人,2004年畢業于太原理工大學控制理論控制工程專業,工程碩士,高級工程師,從事電力檢修和自控設備成套維護工作;
周自強(1984-),男,江蘇徐州人,2009年畢業于東南大學動力工程及工程熱物理專業,碩士,助理工程師,從事信息安全及信息化等工作。