基于純方位角測量的水下目標被動跟蹤技術
2012-05-28 05:59:06宋緒棟李曉花李亞安
水下無人系統學報 2012年5期
宋緒棟, 蔚 婧, 李曉花, 李亞安
?
基于純方位角測量的水下目標被動跟蹤技術
宋緒棟1, 蔚 婧2, 李曉花2, 李亞安2
(1 中國人民解放軍91388部隊, 廣東 湛江, 524022; 2. 西北工業大學 航海學院, 陜西 西安, 710072)
水下目標的被動跟蹤技術在軍事上具有重要的應用價值, 為了解決基于純方位角測量的水下目標被動跟蹤技術在實際應用中的問題, 研究了幾種適合于單、雙觀測站的水下目標被動跟蹤算法。分別對偽線性估計算法、擴展卡爾曼濾波算法、無跡卡爾曼濾波算法在不同參數情況下的性能進行了詳細的仿真與分析。仿真結果表明, 靜止單觀測站雖不能獲得目標的完全觀測, 但是在具有一定先驗信息的情況下, 偽線性估計算法也可以實現對目標軌跡的估計; 雙觀測站可以獲得對目標的完全觀測, 并且在觀測方程嚴重非線性的情況下, 無跡卡爾曼濾波方法的性能要優于擴展卡爾曼濾波方法。仿真結果對工程應用具有重要的參考價值。
水下目標; 純方位目標跟蹤; 偽線性估計; 擴展卡爾曼濾波; 無跡卡爾曼濾波
0 引言
根據跟蹤系統獲得量測數據的方式不同, 目標跟蹤可以分為主動式與被動式[1]。主動式跟蹤主要由主動雷達或聲納獲取目標相對于觀測器之間的距離和相對方位角。這種觀測方式跟蹤目標精確, 處理速度快, 但往往由于自身向外發射信號, 因而很容易被敵方獲知觀測器的具體位置, 在軍事上具有很大劣勢[2]。被動式跟蹤一般由被動雷達、聲納或者通過紅外來獲得目標相對于觀測器之間的方位角, 通過解算而獲得目標的狀態值。這種觀測方式由于是被動的接收信號, 因此具有很強的隱蔽性, 但由于觀測量的減少導致目標的跟蹤精度和收斂程度都有所降低, 這種跟蹤方式應用于軍事領域, 往往能夠給予敵方目標出其不意的毀滅性打擊[3]。
水下目標的被動定位和跟蹤技術源于魚雷、潛艇等武器的隱蔽進攻, 通過被動傳感器測量到的目標信息確定目標的運動參數, 如位置、速度和加速度等。這種方式對魚雷、潛艇等自主式攻擊性武器來說極其重要。
近年來, 基于純方位角測量的水下目標跟蹤問題一直是研究的熱點和難點, 目前常用的方法有多種, 如偽線性估計器[4](pseudo-linear estimator, PLE), 擴展卡爾曼濾波(extended Kalman filter, EKF), 無跡卡爾曼濾波(unscented Kalman filter, UKF)等。本文從實際工程應用的角度出發, 針對單觀測站和雙觀測站兩種情況, 對以上幾種可行方案進行了詳細分析, 通過仿真試驗得出各種方案在不同應用環境下的優劣, 旨在為下一步工程應用提供參考。
1 系統模型


圖1 目標與觀測站的幾何關系示意圖
Fig. 1 Geometric relationship of sonar systems and target

2 單站純方位偽線性估計算法
對純方位目標跟蹤問題的大量研究表明, 利用靜止單站所測量的目標方位信息, 不可能同時解算出目標的距離、航向及速度等全部參數, 即由于存在“距離模糊”, 系統是不完全可觀測的[5]。但是, 在目前實際的軍事應用中, 傳感器網絡還沒有建立的情況下, 不能同時利用多個觀測站對目標進行跟蹤, 因此, 基于單觀測站的純方位目標跟蹤方法肩負著極其重要的責任。若進一步對目標具有一定的先驗知識, 如通過前期目標識別已經知道目標的型號及速度, 則可通過先驗知識對目標參數進行解算, 實現完全觀測。

對式(3)作擬線性處理, 得

定義

可得偽測量方程




對于靜止或者非機動單站, 雖然不能實現對目標的完全觀測, 但是可以獲得目標的航向, 以及目標與觀測站的初始距離與目標速度的比值。這在工程實踐中也具有重要的實際意義, 在對目標速度有一定先驗知識的情況下, 即可獲得對目標的粗略跟蹤, 實現進行隱蔽打擊的目的。
3 雙站純方位目標跟蹤方法
對于勻速直線運動的目標, 利用多個被動傳感器組成傳感器網絡能在較廣泛的區域內實現對目標的角度跟蹤, 配合適當的信息融合算法, 可以實現對目標的完全觀測。這里將以比較實際的雙觀測站為例進行分析。
3.1 擴展卡爾曼濾波方法
在模型滿足高斯線性條件下, 典型的卡爾曼濾波可獲得線性無偏的最小方差估計[6-7]。但是在實際應用中, 線性、高斯等假設條件常常不能滿足要求, 出現濾波精度下降和發散的現象。EKF就是為了克服狀態方程的非線性問題, 將其在狀態的濾波值附近進行泰勒級數展開, 得到線性化后的狀態方程, 進而采用卡爾曼濾波方法進行處理。
假設系統模型可表示為


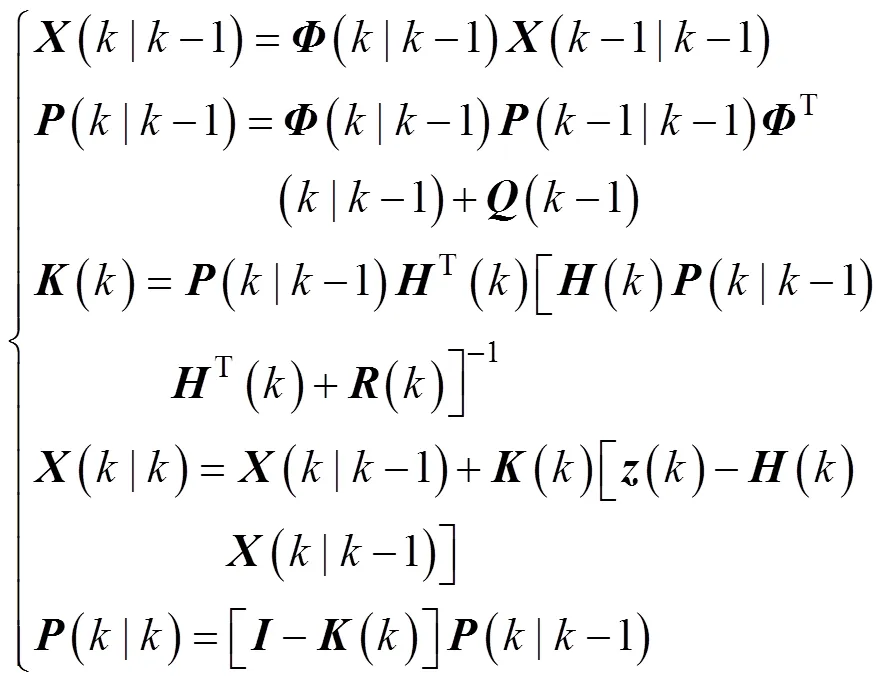
EKF方法是解決非線性濾波問題比較經典的方法, 但是由于弱可觀測條件下測量模型的非線性, 可能會產生濾波過程的發散現象。
3.2 無跡卡爾曼濾波方法
為了改善非線性問題的濾波效果, Julier等人提出了采用UKF方法對非線性問題進行濾波估計[8-10]。該方法在處理狀態方程時, 首先進行無跡變換, 然后使用變換后的狀態變量進行濾波, 以減小估計誤差。其濾波效果在復雜的非線性系統下, 要明顯優于EKF。
離散非線性系統可以描述為

該方法的簡要步驟如下。
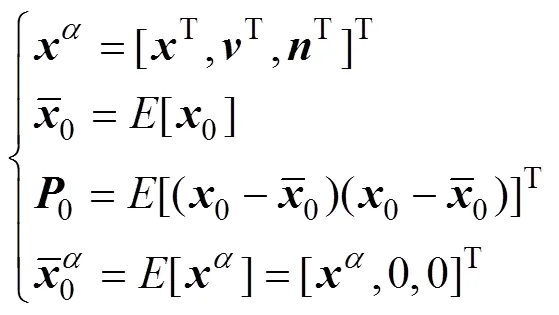

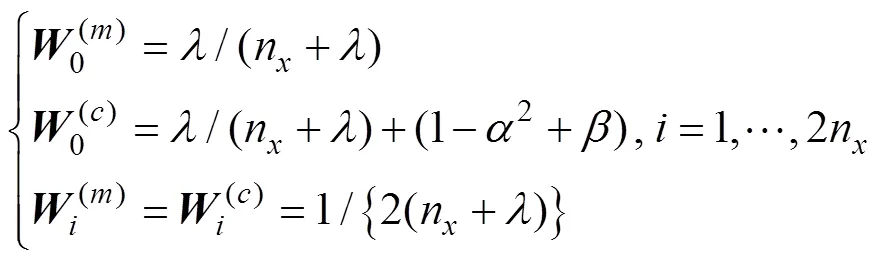
2) 計算權值
3) 計算sigma采樣點的狀態向量

4) 時間更新
5) 量測更新
在UKF算法中, 最重要的問題是確定sigma點采樣策略, 也就是確定sigma采樣的個數、位置及相應的權值。目前已有的采樣策略有對稱采樣, 最小偏度單形采樣, 超球體單形采樣等[11]。
4 仿真結果與分析
為了更加細致地分析上述幾種方法在不同場合的性能, 本節進行了大量計算機仿真, 旨在通過試驗得出一般性規律, 為今后的工程實際應用提供必要的參考。
4.1 靜止單站情況(試驗1)
由于基于純方位信息的靜止單站無法獲得對目標的完全觀測, 因此, 仿真給出了目標的初始距離與目標速度的比值。
圖2中實線表示真實值, 虛線表示估計值, 圓圈為觀測站位置。目標的航跡圖中, 虛線為具有目標先驗速度的情況下, 對目標航跡的估計。圖3給出了單站靜止PLE方法的估計誤差。
4.2 靜止雙站情況(試驗2)
試驗參數: 運動目標參數同試驗1, 2個觀測站分別位于(0, 0), (0, 500)。
圖4中, 2個圓圈表示2個靜止觀測站的位置, 實線為目標真實軌跡, 虛線表示EKF方法估計所得目標軌跡, 點劃線表示UKF方法估計所得目標軌跡, 這2條曲線基本重合。
圖5為所估計各參數分量與真實值之間的誤差, 表1給出了其估計方差。

圖2 單站靜止PLE方法估計結果

圖3 單站靜止PLE方法估計誤差
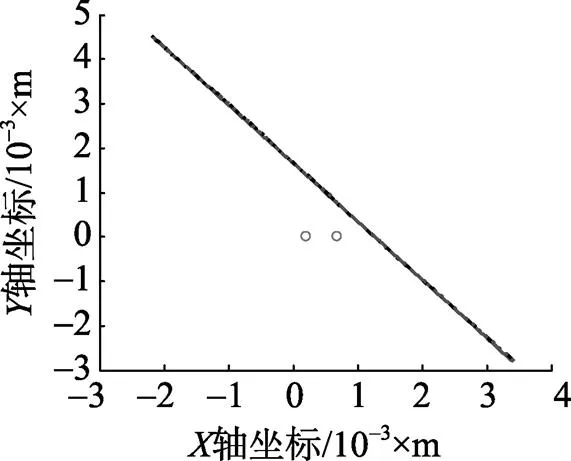
圖4 雙觀測站靜止時UKF與EKF目標軌跡估計

圖5 雙觀測站靜止時UKF與EKF估計誤差
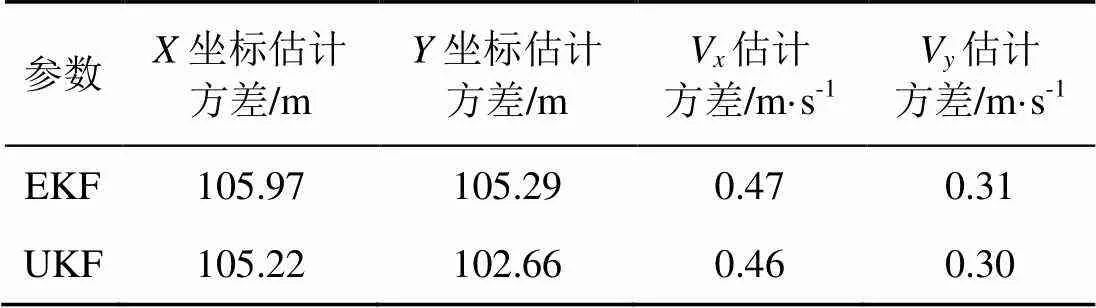
表1 雙觀測站靜止時EKF與UKF方法估計方差
4.3 運動雙站情況(試驗3)
試驗參數: 運動目標參數同試驗1, 2個觀測站分別位于(0, 0), (0, 500), 2個觀測站均以10 kn的速度沿軸正向運動。
圖6中, 2個圓圈表示2個觀測站的初始位置, 實線為目標真實軌跡。與圖4相似, UKF(點劃線)和EKF(虛線)這2種方法估計得到的目標軌跡基本重合。圖7給出了所估計各參數分量與真實值之間的誤差, 表2給出了其估計方差。可以看出, UKF方法的方差要小于EKF方法的方差。
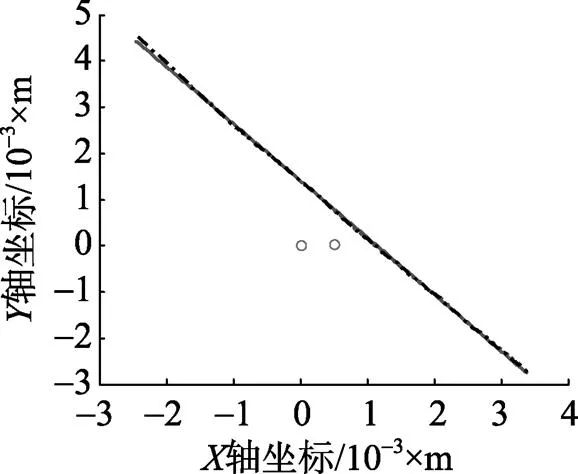
圖6 雙觀測站運動時UKF與EKF目標軌跡估計
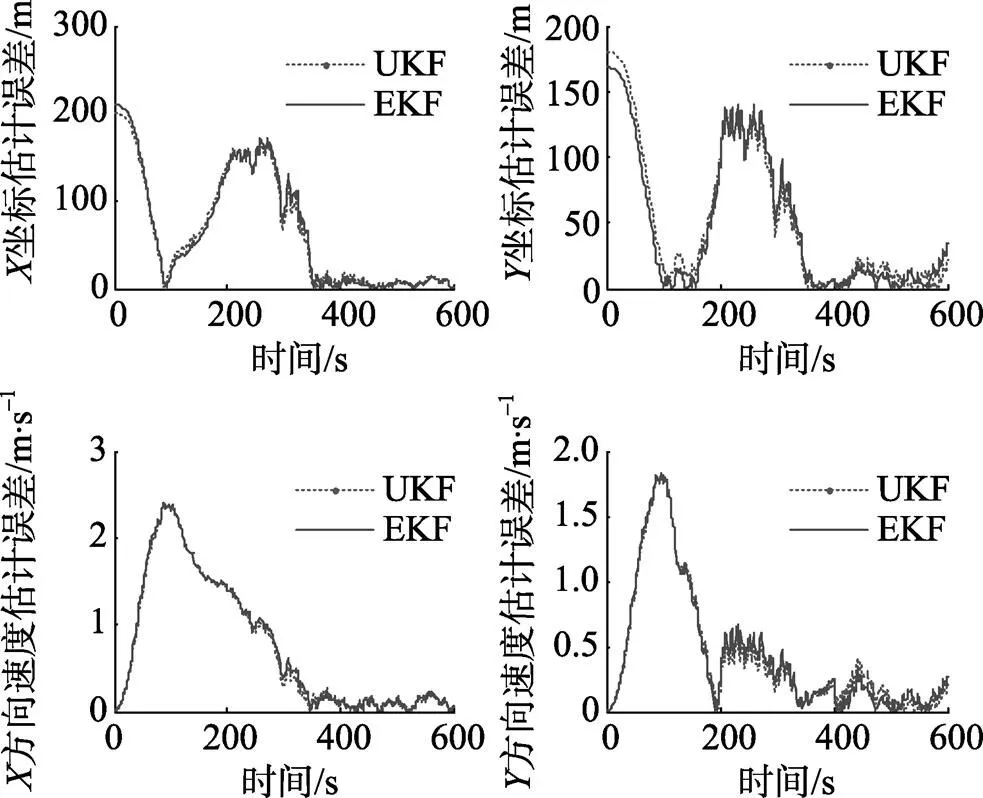
圖7 雙觀測站運動時UKF與EKF估計誤差
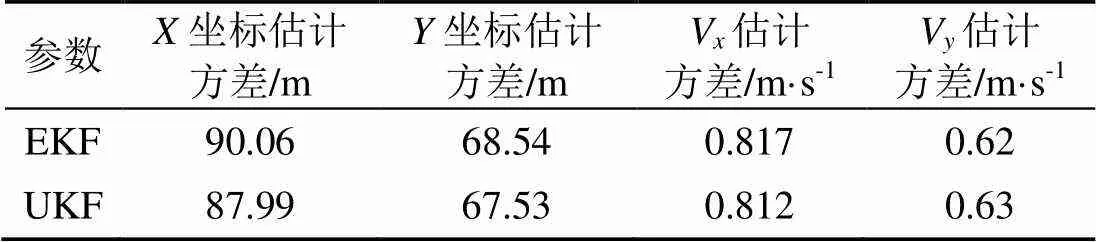
表2 雙觀測站運動時EKF與UKF方法估計方差
5 結束語
基于純方位角測量的水下目標被動跟蹤方法在軍事上具有重要的應用價值, 研究了3種便于工程實用的方法: PLE方法、EKF方法和UKF方法。其中, PLE方法具有計算簡單, 無需初值的優點, 在目標不可完全觀測的情況下, 它可以獲得目標初始距離與速度的比值, 在具有速度先驗知識的情況下, 也可以實現對目標軌跡的估計。雙觀測站可以實現對目標的完全觀測, 分別對雙觀測站靜止和運動2種情況進行了仿真分析, 結果表明, EKF方法和UKF方法均能較準確地估計目標軌跡, 并且UKF方法性能要略優于EKF方法。仿真結果對工程實際應用具有一定的參考價值。
[1] 嚴衛生, 高磊, 張礴, 等. 水下目標跟蹤技術[J]. 火力與指揮控制, 2000, 25(2): 2-6.
Yan Wei-sheng, Gao Lei, Zhang Bo, et al. Underwater Target Tracking[J]. Fire Control & Command Control, 2000, 25 (2): 2-6.
[2] 周宏仁, 敬忠良, 王培德. 機動目標跟蹤[M]. 北京: 國防工業出版社, 1991.
[3] Song T L. Observability of Target Tracking with Bearing-only Measurements[J]. IEEE Transactions on Aerospace and Electronics Systems, 1996, 32(4): 1468-1471.
[4] Aidala V J. Kalman Filter Behavior in Bearings-only Tracking Applications[J]. IEEE Transactions on Aerospace and Electronics Systems, 1979, 15(1): 29-39.
[5] 孫仲康, 周一宇, 何黎星. 單基地有源無源定位技術[M]. 1版. 北京: 國防工業出版社, 1996.
[6] Konrad R, Rolf U. The Extended Kalman Filter as an Exponential Observer for Nonlinear Systems[J]. IEEE Transactions on Signal Processing, 1999, 47(8): 2324-2328.
[7] Simon J J, Jeffrey K U. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482.
[8] Dini D H, Mandic D P, Julier S J. A Widely Linear Complex Unscented Kalman Filter[J]. Signal Processing Letters, 2011, 18(11): 623-626.
[9] 高劍, 徐德民, 嚴衛生, 等. 無跡卡爾曼濾波及其在三維水下目標跟蹤系統中的應用[J]. 船舶工程, 2005, 27(3): 24-28. Gao Jian, Xu De-min, Yan Wei-sheng, et al. UKF and Its Application to 3-D Underwater Target Tracking System[J]. Ship Engineering, 2005, 27(3): 24-28.
[10] Valverde G, Terzija V. Unscented Kalman Filter for Power System Dynamic State Estimation[J]. IET Generation, Tran- smission & Distribution, 2011, 5(1):29-37.
[11] 楊峰, 潘泉, 梁彥, 等. 多源信息空間配準中的UT變換采樣策略研究[J]. 系統仿真學報, 2006, 18(3):15-20. Yang Feng, Pan Quan, Liang Yan, et al. Research on Sampling Strategies of UT Transformation for Space Alignment of Distributed Multi-sensor Information[J]. Journal of System Simulation, 2006, 18(3): 15-20.
Passive Underwater Target Tracking Based on Bearings-Only Angle Measurement
SONG Xu-dong1, YU Jing2, LI Xiao-hua2, LI Ya-an2
(1.91338thUnit, The people′s Liberation Army of China, Zhanjiang 524022, China; 2. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China )
In regard to actual application of passive underwater target tracking technology based on bearings-only angle measurement, several algorithms for monostatic and bistatic sonar systems, i.e. the pseudo-linear estimation (PLE), the extended Kalman filter (EKF), and the unscented Kalman filter (UKF), are discussed, and their performances are simulated with different parameters, respectively. Simulation results illustrate that: 1) The nonmoving monostatic sonar system can not obtain all-around observation of target, but when prior information of the target velocity is available the trajectory of the target can be acquired by using the PLE algorithm; 2) The bistatic sonar system can achieve all-around observation of target, and the performance of the UKF is better than that of the EKF when the observation equation is very nonlinear.
underwater target; bearings-only target tracking; pseudo-linear estimation(PLE); extended Kalman filter(EKF); unscented Kalman filter(UKF)
TJ630.34;TN953
A
1673-1948(2012)05-0353-06
2012-01-06;
2012-04-19.
國家自然科學基金資助項目(51179158).
宋緒棟(1968-), 男, 高級工程師, 主要從事魚雷靶標總體技術研究.
(責任編輯: 楊力軍)
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年24期)2015-04-09 12:04:36