一種利用單信標修正AUV定位誤差的方法
2012-05-28 01:22:38張福斌張永清
水下無人系統學報 2012年1期
關鍵詞:方法
張福斌, 張永清
?
一種利用單信標修正AUV定位誤差的方法
張福斌, 張永清
(西北工業大學 航海學院, 陜西 西安, 710072)
針對配置有捷聯慣導(SINS)/多普勒速度儀(DVL)/深度傳感器組合導航定位系統的自主水下航行器(AUV)的定位誤差隨時間增大, 以及采用GPS修正定位誤差引起的AUV隱蔽性降低等問題, 提出了一種利用水下固定單信標修正SINS/DVL/深度傳感器組合定位誤差的方法。該方法首先利用水聲測距原理測量出AUV與水下固定單信標的距離, 然后基于空間幾何關系計算出AUV的實時位置, 最后通過卡爾曼濾波連續修正AUV的定位誤差。仿真結果表明, 該方法可以有效減小AUV的定位誤差, 有較好的工程應用價值。
自主水下航行器; 組合導航定位系統; 定位誤差; 單信標
0 引言
精確的導航定位是自主水下航行器(autono-mous underwater vehicle, AUV)完成任務的重要保證。AUV傳統導航方法主要采用捷聯慣性導航系統(strapdown inertial navigation system,SINS)、多普勒測速儀(Doppler velocity logger, DVL)、深度傳感器和全球定位系統(global positioning system, GPS)構成組合導航系統[1-4]。AUV的航行深度一般采用深度傳感器直接測量, 當AUV潛入水中時, 以DVL輔助SINS實現導航、定位。由于DVL輔助SINS進行導航定位過程中, 定位誤差隨時間增大, 故AUV每隔一段時間, 需要上浮到近水面, 通過其上安裝的GPS天線, 接收GPS信號, 對累積的定位誤差進行修正, 由此使得AUV的航行隱蔽性降低。另外, 當AUV作業深度較大時, 上浮接收GPS信號過程中會導致AUV產生較大能源消耗。
為延長AUV在水下作業時間, 本文提出一種利用水下固定單信標(短索錨定)修正SINS/ DVL誤差的新方法。假設單信標與AUV均配置水聲通信裝置, 當AUV航行到離信標一定距離時, 首先與信標建立水聲通信連接, 然后與信標進行時間統一, 接著以直線航行方式通過信標周圍區域。在AUV直線航行過程中, 信標以一定時間間隔連續發射水聲脈沖, AUV接收水聲脈沖, 并根據水聲脈沖在水中的傳播時間及聲速計算出AUV相對于信標的距離, 最后AUV利用自身導航定位信息及與信標的相對幾何關系計算出自身實時位置, 進而實現對SINS/DVL組合累積定位誤差的修正。
1 利用單信標對AUV定位原理
步驟1: 當AUV探測到單信標后, AUV首先與信標建立水聲通信連接, 接著信標廣播自身位置信息及時間信息, AUV接收信標位置信息并與信標進行時間統一[5]。

同樣, 由三角形面積公式可得
圖1 自主水下航行器與信標的相對幾何關系
Fig. 1 Geometric relations between AUV and beacon





2 導航系統誤差模型
選取北天東坐標系為導航坐標系。在建立組合系統各子系統的誤差模型方程的基礎上[2,3], 設計SINS/DVL/信標聯邦濾波器[4], 如圖2所示。
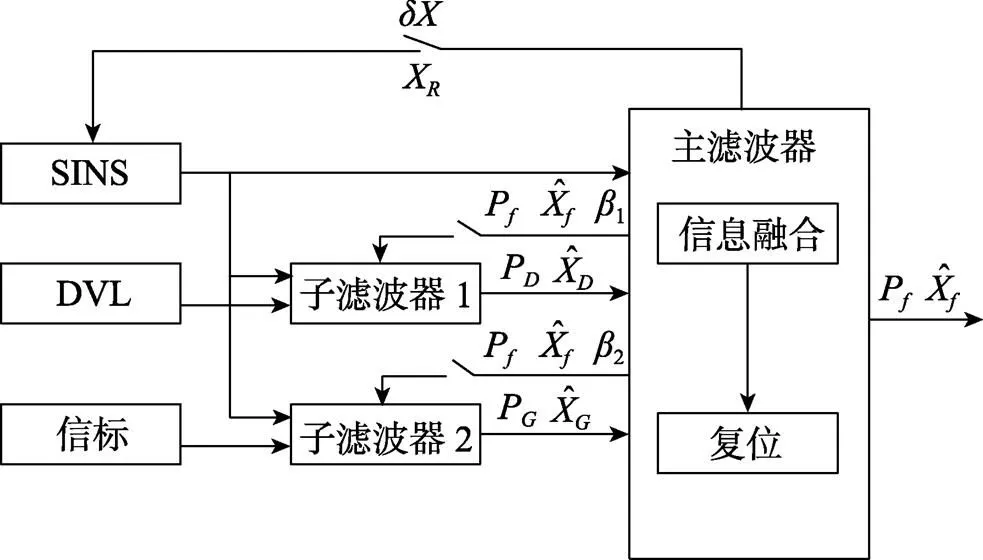
圖2 捷聯慣導系統/多普勒測速儀/信標聯邦濾波器結構示意圖
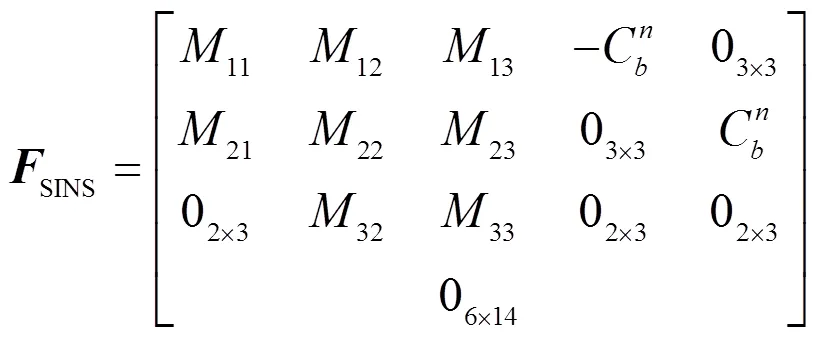
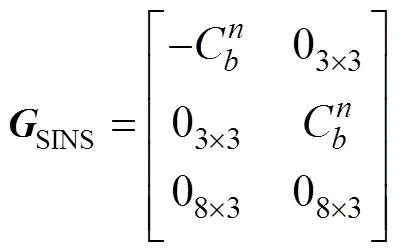
SINS的誤差狀態方程為



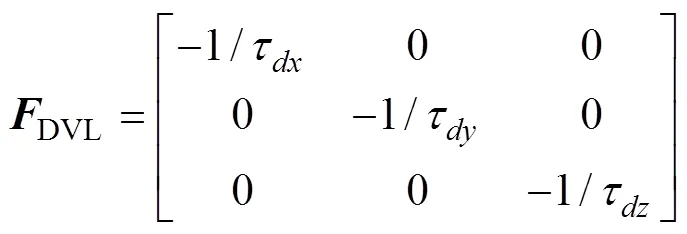
DVL的誤差狀態方程為

其中

SINS/DVL組成子系統的狀態方程為

式中:
SINS/DVL組成子系統的量測方程為
式中:
SINS/信標組成子系統的狀態方程與SINS的誤差狀態方程相同, 量測方程為

式中:


3 仿真結果與分析
為檢驗算法的有效性和可靠性, 進行仿真分析。SINS的誤差源參數如表1所示, DVL的誤差源參數如表2所示。
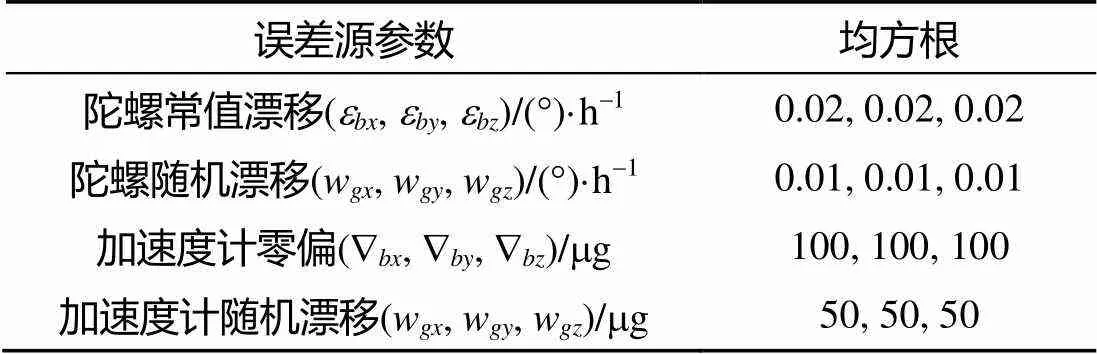
表1 SINS誤差源參數
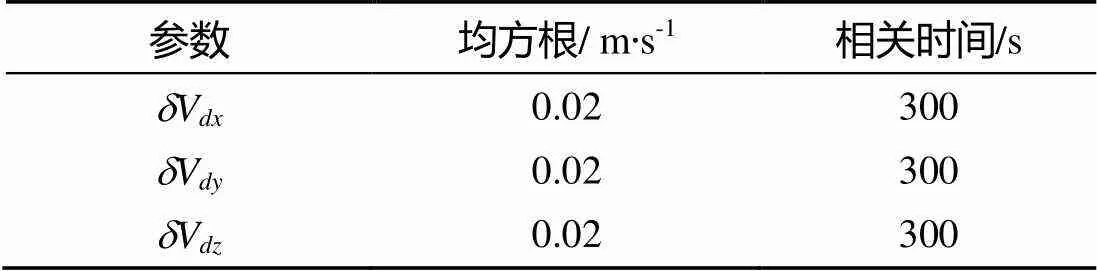
表2 DVL誤差源參數

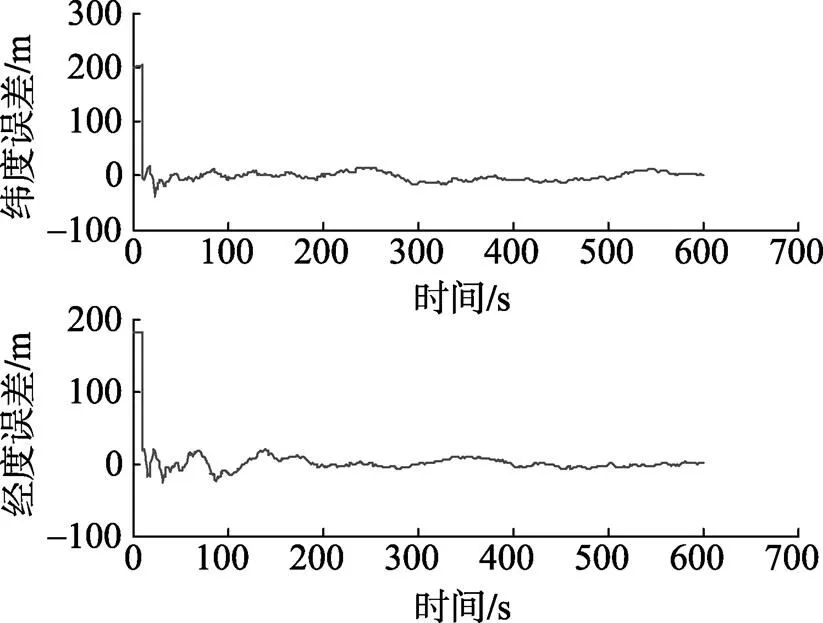
圖3 AUV定位誤差

4 結束語
針對AUV長時間水下作業過程中, SINS/ DVL/深度傳感器組合導航定位誤差累積問題, 提出了一種利用單信標修正定位誤差的方法, 首先利用水聲延遲測距, 然后利用信標與AUV的相對幾何關系連續計算AUV的地理位置, 進而修正累積的定位誤差。仿真結果顯示, 該方法可顯著減小累積的定位誤差。
本文所提方法對水聲通信數據率要求低, 長時間水下作業的AUV采用該方法修正后, 定位誤差明顯減小, 該方法具有較好的工程應用價值。
[1] 秦永元. 慣性導航[M]. 北京: 科學出版社, 2006.
[2] 張福斌. 水下航行器捷聯慣導初始對準及組合導航技術研究[D]. 西安: 西北工業大學, 2008.
[3] 嚴恭敏. 捷聯慣導系統動基座初始對準及其相關問題研究[R]. 西安: 西北工業大學, 2008.
[4] 秦永元, 張洪鉞, 汪叔華. 卡爾曼濾波與組合導航原理[M].西安: 西北工業大學出版社, 1998.
[5] Maczka D K, Gadre A S, Stilwell D J. Implementation of a Cooperative Navigation Algorithm on a Platoon of Autono- mous Underwater Vehicles[C]//Proceedings of MTS/IEEE, 2007: 730-735.
Correcting Localization Error with a Single Beacon for AUV
ZHANG Fu-bin, ZHANG Yong-qing
(College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China)
The localization error of an AUV′s integrated navigation positioning system, which is composed of strapdown inertial navigation system (SINS), Doppler velocity logger (DVL) and depth sensor, increases with time, and the hidden performance of the AUV will decrease in correcting the error via GPS. In this paper, a new method is proposed to correct the localization error of the AUV's navigation system by adopting a fixed beacon under water. In this method, the principle of acoustic ranging is used to measure the distance between AUV and beacon, then the real-time position of the AUV is calculated according to spacial geometric relationships, and the localization error of the AUV′s navigation system is corrected by Kalman filter. Simulation results show that the present approach can correct AUV′s localization error effectively, which infers an application value in engineering.
autonomous underwater vehicle(AUV); integrated navigation positioning system; localization error; single beacon
TJ630.33
A
1673-1948(2012)01-0038-04
2011-04-28;
2011-08-06.
國家自然科學基金(61040055), 西北工業大學基礎研究基金(JC20100224).
張福斌(1972-), 男, 副教授, 主要從事水下航行器導航與控制技術研究.
(責任編輯: 楊力軍)
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
