魚(yú)雷尺度多目標(biāo)多干擾半實(shí)物仿真環(huán)境設(shè)計(jì)與實(shí)現(xiàn)
2012-05-28 01:22:50趙罡,岳青
水下無(wú)人系統(tǒng)學(xué)報(bào) 2012年1期
趙 罡, 岳 青
?
魚(yú)雷尺度多目標(biāo)多干擾半實(shí)物仿真環(huán)境設(shè)計(jì)與實(shí)現(xiàn)
趙 罡, 岳 青
(中國(guó)船舶重工集團(tuán)公司 第705研究所, 陜西 西安, 710075)
隨著信號(hào)檢測(cè)方法及計(jì)算機(jī)技術(shù)的發(fā)展應(yīng)用, 魚(yú)雷自導(dǎo)系統(tǒng)性能不斷提高, 水下尺度多目標(biāo)識(shí)別已成為檢測(cè)現(xiàn)代魚(yú)雷自導(dǎo)系統(tǒng)水聲對(duì)抗能力的重要指標(biāo)之一, 但相關(guān)實(shí)航測(cè)試環(huán)境卻難以實(shí)現(xiàn)。通過(guò)對(duì)尺度多目標(biāo)有效性判斷及遮蔽計(jì)算的分析, 依據(jù)實(shí)時(shí)性原則設(shè)計(jì)了信號(hào)實(shí)時(shí)生成算法并構(gòu)建了半實(shí)物仿真系統(tǒng), 對(duì)魚(yú)雷尺度多目標(biāo)多干擾環(huán)境進(jìn)行了模擬, 為試驗(yàn)室環(huán)境檢測(cè)魚(yú)雷水聲對(duì)抗能力提供了便捷有效的手段。驗(yàn)證結(jié)果表明, 該系統(tǒng)可以滿足相關(guān)仿真需求。
魚(yú)雷自導(dǎo)系統(tǒng); 半實(shí)物仿真; 尺度多目標(biāo)多干擾; 仿真建模; 信號(hào)實(shí)時(shí)生成算法
0 引言
隨著現(xiàn)代科學(xué)技術(shù)的飛速進(jìn)步, 水聲網(wǎng)絡(luò)構(gòu)建不斷完善, 水中兵器日益計(jì)算機(jī)化, 水下作戰(zhàn)中的水聲對(duì)抗也在向集群化、網(wǎng)絡(luò)化方向發(fā)展, 水聲對(duì)抗作戰(zhàn)環(huán)境將更為復(fù)雜、方式更為靈活, 多目標(biāo)和多類型水聲對(duì)抗必將成為水中主戰(zhàn)武器——魚(yú)雷所面臨的迫切挑戰(zhàn)。
基于成本、技術(shù)條件及實(shí)現(xiàn)難度等綜合因素, 多目標(biāo)/干擾的實(shí)航試驗(yàn)環(huán)境是難以構(gòu)建的, 而在作為檢測(cè)魚(yú)雷作戰(zhàn)性能重要手段之一的試驗(yàn)室仿真系統(tǒng)中模擬多目標(biāo)/干擾的試驗(yàn)態(tài)勢(shì), 則具備構(gòu)建快速、靈活、針對(duì)性強(qiáng)、成本可控等優(yōu)點(diǎn), 因此是一種檢驗(yàn)新型魚(yú)雷復(fù)雜作戰(zhàn)條件下目標(biāo)檢測(cè)及識(shí)別能力的可行方法, 并成為當(dāng)前水聲對(duì)抗研究的熱點(diǎn)問(wèn)題之一[1-2]。
1 尺度目標(biāo)/干擾亮點(diǎn)建模
現(xiàn)代魚(yú)雷武器均具有尺度目標(biāo)識(shí)別能力, 在進(jìn)行多目標(biāo)多干擾的仿真建模時(shí)需滿足這一需求。研究已經(jīng)證明了多亮點(diǎn)模擬尺度目標(biāo)算法的可行性[3-5], 并給出了相關(guān)試驗(yàn)結(jié)果。
為滿足復(fù)雜半實(shí)物仿真系統(tǒng)的實(shí)時(shí)性要求, 魚(yú)雷多尺度目標(biāo)/干擾自導(dǎo)半實(shí)物仿真系統(tǒng)采用了簡(jiǎn)化亮點(diǎn)模型, 即只考慮亮點(diǎn)鏡面反射回波, 并認(rèn)為同一目標(biāo)體的各亮點(diǎn)具有同樣的速度。則在常用的線性調(diào)頻(linear frequency modulation, LFM)及雙曲調(diào)頻(hyperbolic frequency modula- tion, HFM)寬帶信號(hào)調(diào)制模式下, 其單亮點(diǎn)目標(biāo)回波時(shí)域信號(hào)如式(1)和式(2)[6]。
式中:0為回波聲壓;0為L(zhǎng)FM發(fā)射信號(hào)最低頻率/HFM發(fā)射信號(hào)時(shí)間中心頻率;f為HFM發(fā)射信號(hào)算術(shù)中心頻率;為發(fā)射信號(hào)頻率帶寬;為發(fā)射信號(hào)脈沖寬度;為亮點(diǎn)目標(biāo)回波延時(shí);為多普勒壓縮因子,=1+2V/;()為亮點(diǎn)回波信號(hào)強(qiáng)度。
2 多目標(biāo)多干擾仿真建模
出于仿真結(jié)果正確性及系統(tǒng)工作效率的考慮, 主要需解決目標(biāo)有效性的判別及尺度目標(biāo)遮蔽兩方面的問(wèn)題, 具體說(shuō)明如下。
2.1 目標(biāo)有效性判別
如圖1所示, 設(shè)魚(yú)雷自導(dǎo)接收波束的水平和垂直開(kāi)角為和, 取坐標(biāo)系圓點(diǎn)位于魚(yú)雷聲中心,軸與魚(yú)雷聲軸重合,軸向上,軸水平, 并記此坐標(biāo)系為魚(yú)雷聲軸坐標(biāo)系。則自導(dǎo)接收波束橢椎體可描述為

設(shè)目標(biāo)體的中心坐標(biāo)為(1,1,1), 在軸上取點(diǎn)(1, 0, 0)。
將=1,/=1/1與式(3)聯(lián)立, 解出直線與發(fā)射波束橢錐面的2個(gè)交點(diǎn)坐標(biāo)
1(2,2,2),1(3,3,3)
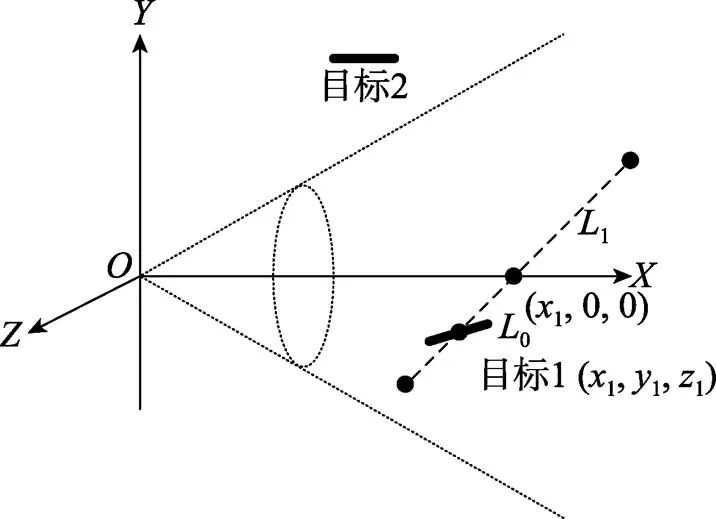
圖1 目標(biāo)有效性判斷示意圖
取任一交點(diǎn)到點(diǎn)的距離1, 以及目標(biāo)體中心點(diǎn)到點(diǎn)的距離0, 比較1和0, 如果1>0, 則認(rèn)為目標(biāo)體在魚(yú)雷自導(dǎo)接收波束錐體內(nèi),目標(biāo)有效; 否則超出錐體, 目標(biāo)無(wú)效。
2.2 尺度目標(biāo)/干擾遮蔽計(jì)算
真實(shí)尺度目標(biāo)/干擾遮蔽的情況較為復(fù)雜[5], 仿真時(shí)可僅從幾何角度考慮尺度目標(biāo)/干擾相互遮蔽問(wèn)題。如圖2所示, 對(duì)于2個(gè)有效尺度目標(biāo)/干擾, 在魚(yú)雷聲軸坐標(biāo)系中: 令魚(yú)雷位于坐標(biāo)原點(diǎn)處, 尺度目標(biāo)/干擾1長(zhǎng)1, 描述為(1,1,1,1,?1), 尺度目標(biāo)/干擾2長(zhǎng)2, 描述為(2,2,2,?2,?2), 其中和分別為尺度目標(biāo)的偏航角和俯仰角。一般潛艇類目標(biāo)的俯仰角都較小, 可取1=2=0以簡(jiǎn)化計(jì)算。
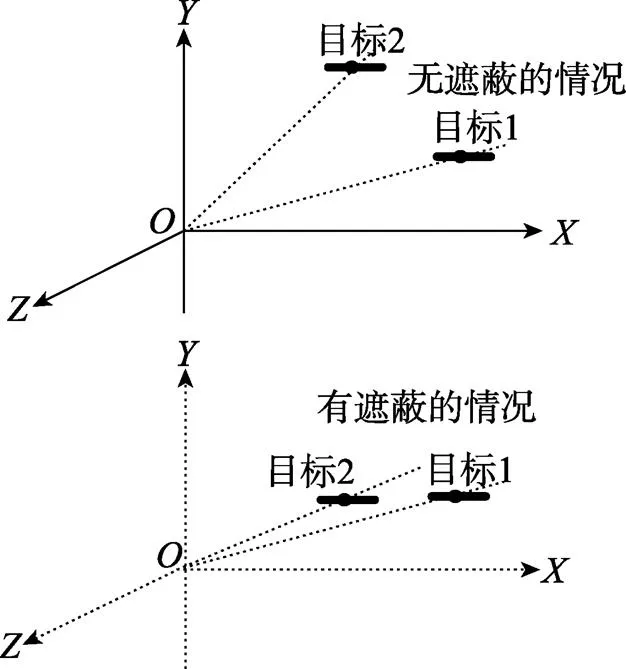
圖2 遮蔽可能性示意圖
圖2中, 如果2個(gè)尺度目標(biāo)/干擾中心與平面的2個(gè)夾角相差較小(差別范圍由雷目距離及目標(biāo)垂直方向尺度確定), 則2個(gè)尺度目標(biāo)/干擾可能存在遮蔽現(xiàn)象, 否則不存在遮蔽現(xiàn)象。
當(dāng)存在遮蔽可能時(shí), 根據(jù)式(4)及式(5)可解得目標(biāo)1的兩端坐標(biāo), 進(jìn)而解出兩端與軸的夾角11,12。
同樣, 對(duì)尺度目標(biāo)/干擾2解出其兩端與軸的夾角21,22, 如果兩組夾角間存在重合, 則判定2個(gè)尺度目標(biāo)/干擾存在遮蔽現(xiàn)象, 否則不存在遮蔽現(xiàn)象。
當(dāng)存在遮蔽現(xiàn)象時(shí), 其中一種情況如圖3所示。
圖3 尺度目標(biāo)/干擾遮蔽計(jì)算示意圖
根據(jù)式(6)可計(jì)算出遮蔽點(diǎn)(x,y)坐標(biāo)。
由此可計(jì)算出2個(gè)尺度目標(biāo)/干擾的有效部分, 在得到每一尺度目標(biāo)/干擾的有效回波信號(hào)后, 將它們按照各自抵達(dá)雷頭的時(shí)間順序?qū)?yīng)疊加, 就可得到聲場(chǎng)中的尺度目標(biāo)/干擾回波信號(hào)。
3 回波信號(hào)生成算法及軟件設(shè)計(jì)
根據(jù)試驗(yàn)需求, 每一尺度目標(biāo)/干擾可由3~5個(gè)亮點(diǎn)構(gòu)成, 采用上述簡(jiǎn)化亮點(diǎn)及遮蔽模型, 使用一塊主頻為1.5 GHz的PPC7448CPU, 在仿真步長(zhǎng)為5 ms, 信號(hào)采樣率為250 kHz情況下, 則每步計(jì)算需生成250×5 = 1250組浮點(diǎn)數(shù)據(jù)加和, 其中每組數(shù)據(jù)由信號(hào)脈沖個(gè)數(shù)決定, 為1~4個(gè)不等。
經(jīng)測(cè)試, 每個(gè)亮點(diǎn)特征參數(shù)計(jì)算及回波信號(hào)生成耗時(shí)約為2 ms。若軟件采用順序流程將無(wú)法保證運(yùn)算實(shí)時(shí)性。為此, 對(duì)亮點(diǎn)回波信號(hào)處理軟件進(jìn)行模塊化設(shè)計(jì), 其模塊組成如圖4所示。
為保證運(yùn)算實(shí)時(shí)性, 進(jìn)行如下工作:
1) 在軟件模塊設(shè)計(jì)基礎(chǔ)上, 根據(jù)模塊關(guān)系耦合度完成功能劃分, 并結(jié)合DSP產(chǎn)品特性對(duì)軟件進(jìn)行CPU運(yùn)算分配以提高仿真系統(tǒng)計(jì)算效率, 分配結(jié)果如圖5所示。
2) 根據(jù)例程測(cè)試結(jié)果, 在不計(jì)算聲線匯聚的情況下, 回波信號(hào)生成占整個(gè)仿真軟件運(yùn)算耗時(shí)的60%以上。
在回波信號(hào)生成算法設(shè)計(jì)時(shí), 對(duì)式(1)和式(2)的數(shù)學(xué)模型進(jìn)行優(yōu)化, 通過(guò)提取循環(huán)不變量預(yù)計(jì)算的方式降低計(jì)算循環(huán)圈復(fù)雜度, 從而減少CPU運(yùn)算總量, 以HFM算法為例, 其優(yōu)化方式如下所示。
myPulseWidth=pulseWidth/freqCompressGene [myLPNum];
/*雙曲線起始T在-(pulseWidth/2)處,還要考慮頻率壓縮影響。*/
startT = -0.00025 * myPulseWidth;
/*paramT0 = 1/ t0, t0= (pulseWidth / freqBand) * freqCenter。 */
paramT0= 2000.0 * freqBand / (myPulseWidth * freqCenter);
/*根據(jù)f(t)=K/(t0-t),令t=-pulseWidth/2,則f(t)= freqLow,可推知K。*/
paramK= freqLow * (1.0 / paramT0 + 0.00025 * myPulseWidth);
/*運(yùn)算不變量提至循環(huán)外以減少運(yùn)算量。*/
unchangedValue = 2.0 * PI * paramK;
valueT0=unchangedValue * log(1.0 + startT * paramT0);
halfDataNum=(int)(0.5 * myPulseWidth *

圖4 信號(hào)生成軟件模塊組成
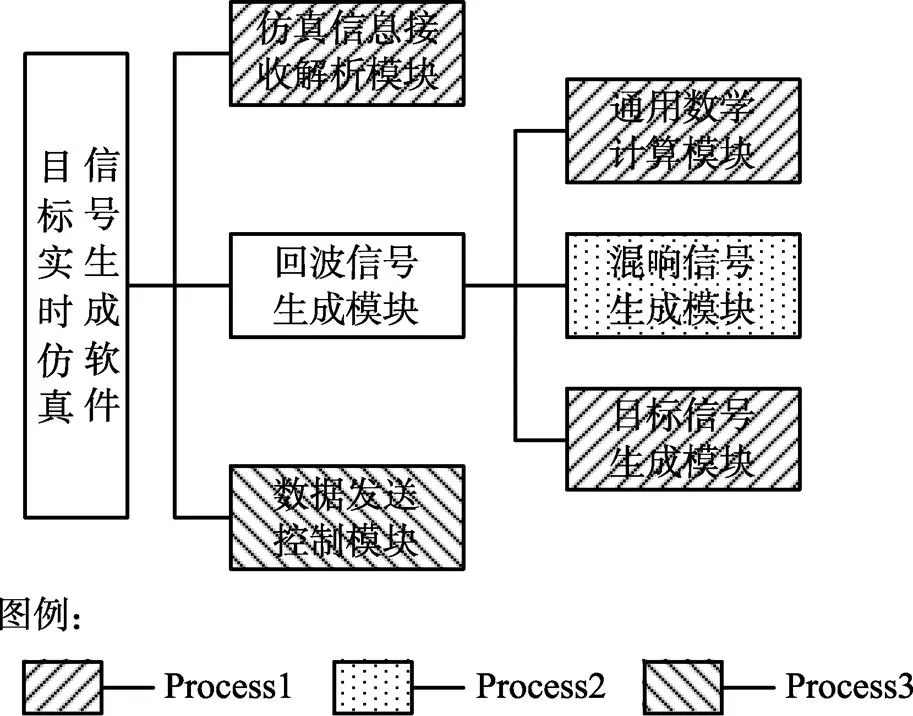
圖5 軟件模塊CPU運(yùn)算分配
250);
/*以下為循環(huán)計(jì)算生成目標(biāo)回波信號(hào)*/
while(totalDataNum < (halfDataNum * 2))
{
……
}
3) 仿真步長(zhǎng)為5 ms, 但目標(biāo)回波時(shí)刻計(jì)算可以精確至采樣率精度即1/250 000 = 4 us。為保證輸出信號(hào)實(shí)時(shí)精度, 需要對(duì)每周期運(yùn)算所得信號(hào)數(shù)據(jù)進(jìn)行補(bǔ)零處理, 補(bǔ)零算法示意如圖6所示。以HFM目標(biāo)/干擾回波信號(hào)生成為例, 補(bǔ)零算法的軟件實(shí)現(xiàn)如下所示。
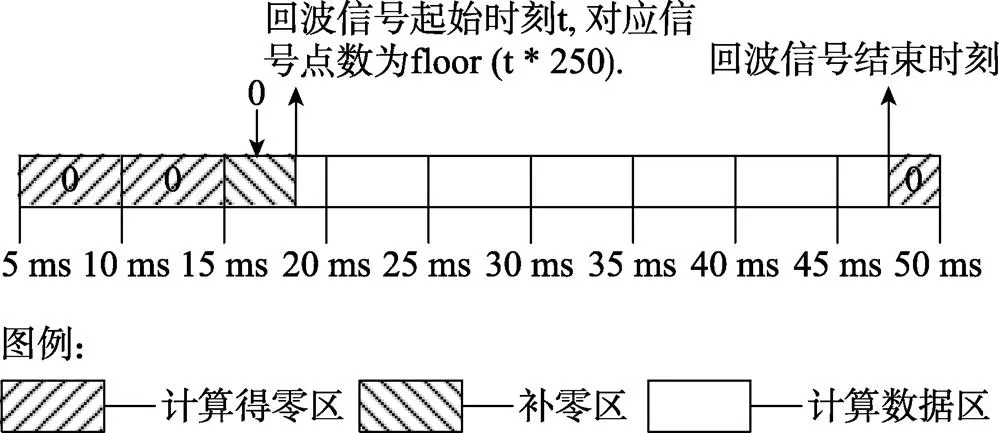
圖6 補(bǔ)零算法示意圖
zeroDataNum = (myLPParamResult[myLPNum] [myPulseNum]. timeToTor - (int)(myLPParamResult[myLPNum][myPulseNum].timeToTor / 5) * 5) * 250;
if(PadZeroOver == DISABLE)
{
/*將每脈沖中相對(duì)于5ms整點(diǎn)時(shí)刻沒(méi)有信號(hào)輸出的部分填充為0。*/
for(signalNum = 0; signalNum < zeroData-
Num; signalNum++)
{
LPWaveSignalN[myLPNum * 240 * 250 +
signalNum] = 0.0;
PadZeroOver = ENABLE;
}
}
以上軟件算法及結(jié)構(gòu)的優(yōu)化設(shè)計(jì), 提高了回波信號(hào)生成模塊的運(yùn)算效率和正確性。除此外, 通用計(jì)算模塊算法、軟件邏輯控制、共享信息傳遞等若干方面也結(jié)合硬件環(huán)境進(jìn)行了優(yōu)化設(shè)計(jì)和試驗(yàn)驗(yàn)證, 進(jìn)一步提高了整個(gè)仿真系統(tǒng)的實(shí)時(shí)可靠性。
4 系統(tǒng)構(gòu)建及驗(yàn)證
在前述模型分析及算法和軟件結(jié)構(gòu)設(shè)計(jì)的基礎(chǔ)上, 基于嵌入式硬件環(huán)境對(duì)魚(yú)雷尺度多目標(biāo)/干擾自導(dǎo)半實(shí)物仿真系統(tǒng)進(jìn)行了構(gòu)建。系統(tǒng)采用多CPU DSP板實(shí)現(xiàn)運(yùn)算分配, 由多路DA板、多通道程控功率放大設(shè)備、水下?lián)Q能器基陣、上位仿真控制計(jì)算機(jī)等組成, 系統(tǒng)組成示意如圖7所示。
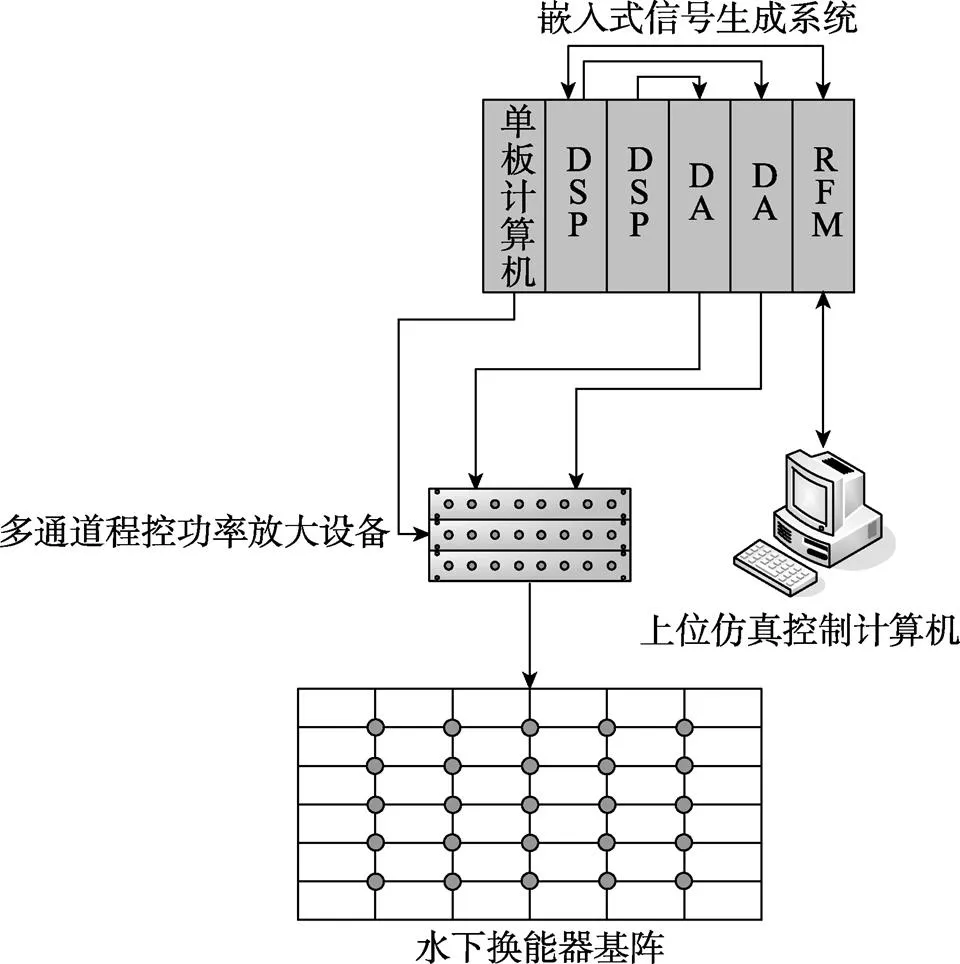
圖7 仿真系統(tǒng)組成示意圖
仿真軟件使用遵循ANSI標(biāo)準(zhǔn)的 C語(yǔ)言實(shí)現(xiàn), 操作系統(tǒng)平臺(tái)為Vxworks, 集成開(kāi)發(fā)運(yùn)行環(huán)境使用tornado 2.2.1, 對(duì)系統(tǒng)所生成目標(biāo)回波信號(hào)數(shù)據(jù)分析結(jié)果見(jiàn)圖8~圖10。
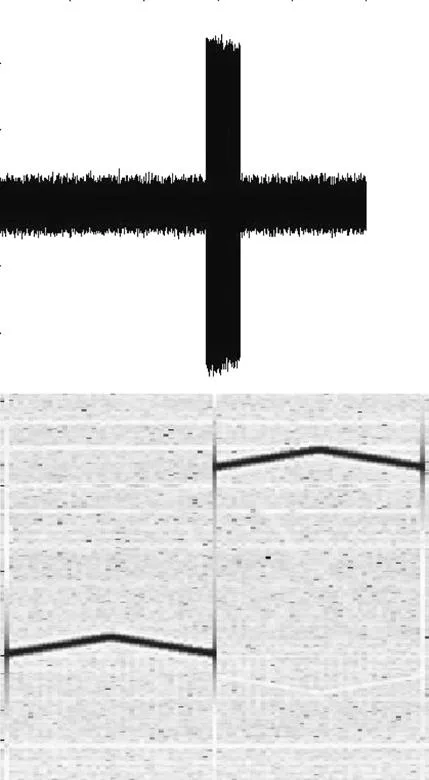
圖8 單亮點(diǎn)線性調(diào)頻(LFM)信號(hào)時(shí)域時(shí)頻圖
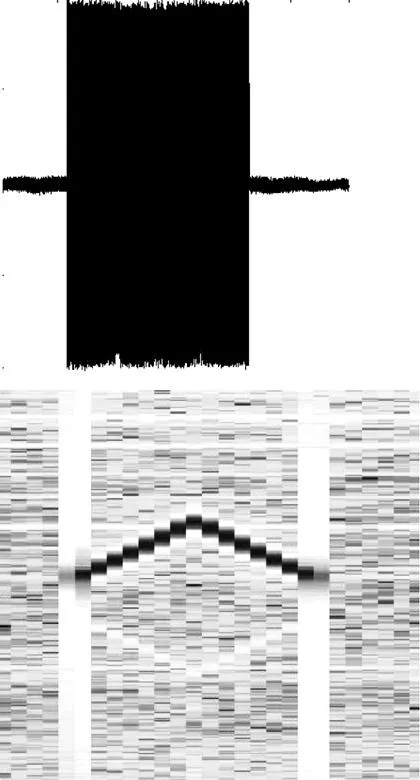
圖9 單亮點(diǎn)HFM信號(hào)時(shí)域時(shí)頻圖
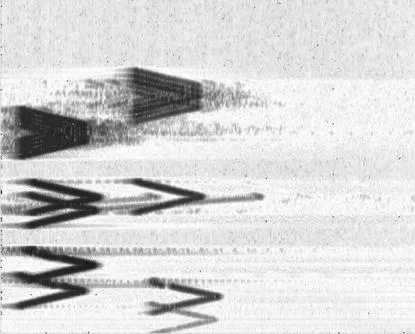
圖10 多(尺度)目標(biāo)時(shí)頻圖
數(shù)據(jù)短時(shí)傅立葉分析結(jié)果表明, 系統(tǒng)所實(shí)現(xiàn)多尺度目標(biāo)/干擾仿真回波信號(hào)組成及特征參數(shù)均符合仿真上位機(jī)預(yù)設(shè)定信息, 信號(hào)連續(xù)、準(zhǔn)確, 可以滿足進(jìn)一步科研及試驗(yàn)工作需要。
5 結(jié)束語(yǔ)
本文從數(shù)學(xué)模型及仿真軟件設(shè)計(jì)優(yōu)化角度, 對(duì)尺度多目標(biāo)/干擾仿真方法進(jìn)行了探討, 并給出了基于嵌入式系統(tǒng)的魚(yú)雷尺度多目標(biāo)/干擾半實(shí)物仿真系統(tǒng)的構(gòu)建方案, 結(jié)果表明, 系統(tǒng)可以滿足半實(shí)物仿真需求。
為保證系統(tǒng)的實(shí)時(shí)性, 文中采用的是簡(jiǎn)化的目標(biāo)遮蔽及亮點(diǎn)模型, 下一步的研究重點(diǎn)在于, 通過(guò)對(duì)目標(biāo)亮點(diǎn)仿真算法的深入研究, 建立更精確的尺度目標(biāo)亮點(diǎn)回波模型, 進(jìn)行更優(yōu)化的系統(tǒng)設(shè)計(jì), 從而在保證實(shí)時(shí)性的前提下, 提高系統(tǒng)的仿真可信度。
[1] 褚福照, 黃建國(guó), 張群飛, 等. 水聲對(duì)抗聲學(xué)仿真系統(tǒng)關(guān)鍵技術(shù)[J]. 聲學(xué)技術(shù), 2008, 27(6): 828-831. Chu Fu-zhao, Huang Jian-guo, Zhang Qun-fei, et al. Key Technology of Underwater Acoustical Warfare Simulation System[J]. Technical Acoustics, 2008, 27(6): 828-831.
[2] 董陽(yáng)澤, 劉平香, 姚藍(lán). 水聲對(duì)抗仿真系統(tǒng)研究的新思路及其應(yīng)用[J]. 計(jì)算機(jī)工程與科學(xué), 2005, 27(7): 88-90. Dong Yang-ze, Liu Ping-xiang, Yao Lan. New Ideal for the Underwater Acoustic Warfare Simulation System and Their Application[J]. Computer Engineering & Science, 2005, 27(7): 88-90.
[3] 崔懷林, 楊云川, 李志舜. 水下體目標(biāo)回波空間方位特性仿真研究[J]. 系統(tǒng)仿真學(xué)報(bào), 2006, 18(6): 1692-1695. Cui Huai-lin, Yang Yun-chuan, Li Zhi-shun. Research on Spatial Bearing Characteristics Simulation Method of Underwater Target Echo Based on Circular Arc Array[J]. Journal of System Simulation, 2006, 18(6): 1692-1695.
[4] 劉文遠(yuǎn), 張靜遠(yuǎn), 呂陽(yáng), 等. 基于改進(jìn)亮點(diǎn)模型的尺度目標(biāo)建模技術(shù)[J]. 魚(yú)雷技術(shù), 2009, 17(4): 20-24. Liu Wen-yuan, Zhang Jing-yuan, LüYang, et al. Scaling Target Echo Modeling Technology Based on Modified Highlight Model[J]. Torpedo Technology, 2009, 17(4): 20-24.
[5] 劉文遠(yuǎn), 趙金海, 宋永峰. 基于修正亮點(diǎn)模型的水下體目標(biāo)建模技術(shù)[J]. 魚(yú)雷技術(shù), 2010, 18(5): 352-356. Liu Wen-yuan, Zhao Jin-hai, Song Yong-feng. Underwater Target Modeling Technology Based on Modified High- light Model[J]. Torpedo Technology, 2010, 18(5): 352- 356.
[6] 李志舜. 魚(yú)雷自導(dǎo)信號(hào)與信息處理[M]. 西安: 西北工業(yè)大學(xué)出版社, 2004.
Design and Implementation of Hardware-in-the-loop Simulation Environment in Scaling Multi-Target and Multi-Jamming of Torpedo
ZHAOGang, YUEQing
(The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China)
The underwater scaling multi-target identification has become an important index for evaluating acoustic countermeasure capability of modern torpedo homing system, but the relative sea trial circumstance is difficult to construct. Based on the analyses of target validity judgment and shelter calculation for scaling multi-target, a real-time signal generation algorithm is designed, and a hardware-in-the-loop simulation system is constructed. Simulation of scaling multi-target and multi-jamming environment is conducted with the system. The test results prove that the proposed system can meet the needs of relational simulation.
torpedo homing system; hardware-in-the-loop simulation; scaling multi-target and multi-jamming; simulation modeling; real-time signal generation algorithm
TJ630.34; TP391.9
A
1673-1948(2012)01-0063-06
2011-05-21;
2011-06-20.
趙 罡(1976-), 男, 碩士, 工程師, 研究方向?yàn)轸~(yú)雷制導(dǎo)半實(shí)物仿真.
(責(zé)任編輯: 許 妍)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
