基于聯合制導方式的潛射反主動聲納魚雷探討
2012-05-28 01:17:40錢忠明
水下無人系統學報 2012年1期
關鍵詞:信號
錢忠明
?
基于聯合制導方式的潛射反主動聲納魚雷探討
錢忠明
(中國人民解放軍92858部隊, 浙江 寧波, 315812)
針對現行潛射反艦魚雷制導方式受海洋環境的影響, 潛艇攻擊距離和魚雷自導距離被制約的問題, 借鑒反輻射導彈的設計理念, 提出了一種基于對目標探測信號的測量和其他組合聯合制導的新型魚雷制導方式。采用這種自導方式的反主動聲納魚雷, 以反潛艦艇和魚雷發出的主動聲納脈沖信號為導引源, 對目標實施硬殺傷。探討了聯合制導方式下, 反主動聲納魚雷的設計原理及技術特點, 并假想了其作戰流程。分析表明, 反主動聲納魚雷的作戰特點符合實際攻擊和作戰需要, 具有較好的應用前景。
反主動聲納魚雷; 聯合制導; 反輻射技術
1 需求背景
潛艇發射魚雷攻擊水面艦艇, 因其攻擊隱蔽性好、爆炸威力大的特點, 被世界各國海軍廣泛重視。目前, 國內外反艦魚雷的制導方式末自導通常采用尾流自導、被動聲自導, 有些還采用主動聲自導等方式。魚雷攻擊水面艦艇的方式主要是預先給魚雷輸入目標參數或利用線導技術實施導引魚雷, 在接近目標艦一定距離時, 魚雷末自導工作, 對尾流或輻射噪聲信號進行處理、檢測, 直至跟蹤、攻擊目標[1]。不難看出, 這些自導方式受目標的尾流長度、輻射噪聲等物理場及海況、聲速梯度等水文環境影響較大, 大大制約了潛艇攻擊距離和魚雷自導距離。
潛艇在自身防御、遭受攻擊需要發射魚雷的時候, 必須要花費大量的時間去對目標要素進行解算, 在對魚雷進行參數設定后才能發射, 大量的時耗使潛艇失去了先敵攻擊的機會, 喪失了戰場上的主動權。而本文所討論的反主動聲納魚雷則不需要如此長時間的解算和參數設定, 只要潛艇發現敵方主動聲納脈沖, 即可發射反主動聲納魚雷進行攻擊。這主要表現在以下兩方面。
1) 潛艇打擊敵方水面艦艇。水面艦艇對潛艇的搜索往往是采取艦載聲納主被動聯合方式進行搜索、定位及攻擊。由于潛艇發現主動聲納脈沖信號的距離比發現目標輻射噪聲的距離要大的多, 所以潛艇在發現敵方水面艦艇主動聲納脈沖時, 不需要進行目標要素解算, 直接發射反主動聲納魚雷進行攻擊。魚雷接收敵方水面艦艇發出的主動聲納脈沖進行導引, 跟蹤其主動聲納脈沖信號直至摧毀敵方艦艇。
2) 潛艇自身防御敵反潛魚雷。反潛魚雷的自導方式通常采用主動聲自導進行搜索并攻擊潛艇, 潛艇對魚雷的防御通常采用施放干擾器材、聲誘餌, 對來襲魚雷進行軟對抗, 還沒有一種可以摧毀來襲魚雷的硬對抗武器。而反主動聲納魚雷在潛艇遭受魚雷攻擊時, 就可以發現并跟蹤反潛魚雷發射出的主動聲納脈沖信號, 對來襲魚雷進行硬殺傷摧毀, 從而大大提高潛艇的防御和對抗能力。
2 基于聯合制導方式的潛射反主動聲納魚雷
2.1 設計原理
在當今電子對抗領域, 反輻射武器具有不可磨滅的重要作用, 尤其是反輻射導彈已經發展到第3代, 技術較為成熟。這種具有隱蔽攻擊、硬殺傷特點的武器是對雷達威脅最大的一種武器, 以目標電磁輻射為導引源不僅能有效抑制雷達的作戰使用, 而且能摧毀雷達設備和殺傷雷達操縱人員, 是現代防空壓制的主要硬殺傷武器[2]。反主動聲納魚雷就是借鑒了反輻射導彈的原理, 以反潛艦艇和魚雷發出的主動聲納脈沖信號為導引源, 從而對目標進行硬殺傷。
由于目前魚雷聲自導基陣安裝在魚雷前端自導頭內, 尺度較小, 即使接收到主動脈沖信號也不能解算出它的方位信息。因此, 為了使反主動聲納魚雷能夠更好的接收并跟蹤主動聲納脈沖信號, 就必須在魚雷雷體的兩側增加安裝聲納脈沖信號接收處理器, 即舷側陣(如圖1), 在一定的舷角范圍內可接收并解算出主動聲納脈沖信號的方位, 用于魚雷導引。為了保證該型魚雷既能探測聲納脈沖用于反艦, 又能探測反潛魚雷主動自導脈沖用于反魚雷, 舷側陣的工作頻段可設置為兩檔, 即反艦艇聲納脈沖時采用低頻段, 反主動聲納魚雷時采用高頻段, 在魚雷發射前根據任務需求, 選擇設定。

圖1 反主動聲納魚雷信號接收示意圖
作為反艦主動聲納魚雷使用時, 舷側陣不斷對接收的主動聲納脈沖信號進行檢測、分析、處理并控制魚雷自動尋的, 魚雷在向目標接近過程中, 若魚雷因與目標的相對位置發生改變導致舷側陣不能接收到主動聲納脈沖信號, 說明此時的魚雷航向正對著目標主動聲納脈沖信號發射方向, 魚雷為直航, 隨著目標與魚雷相對位置的改變, 一旦目標主動聲納脈沖信號進入舷側陣的可接收舷角, 舷側陣繼續導引魚雷, 如此周而復始, 將魚雷導向目標附近。在這過程中, 若魚雷被動聲自導能檢測到目標的輻射噪聲, 則魚雷由被動聲自導檢測到的目標輻射噪聲方位導引并攻擊目標。為防止目標因停止發射聲納主動脈沖信號而導致攻擊失敗, 發射前可人工設定魚雷被動自導開機距離, 這時的魚雷就是目前常用的被動聲自導魚雷。
在對抗來襲魚雷時, 反主動聲納魚雷不斷接收來襲魚雷的主動聲自導脈沖信號并導引魚雷, 直至在距來襲魚雷一定距離上, 采用近炸引信引爆魚雷, 達到摧毀、干擾來襲魚雷的目的。為防止魚雷因丟失來襲魚雷的主動聲自導脈沖信號而導致攔截失敗, 發射前可人工設定魚雷主動自導開機距離, 在一定距離上令魚雷主動自導開機, 由主動自導發現、導引魚雷, 并控制近炸引信引爆魚雷。
反主動聲納魚雷如何辨別所接收到的主動聲納脈沖信號。真實海戰情況下, 除了敵方艦艇發出的信號外, 聲納浮標、吊放聲納等都會有主動聲納脈沖信號。魚雷必須能識別別出聲納浮標、吊放聲納發出的脈沖信號并作出篩選, 這樣才能做到有的放矢。聲納浮標和吊放聲納所使用的主動聲納頻率和水面艦艇所使用的頻率差別比較大, 所以魚雷可以加裝主動聲納信號判別裝置, 根據所接收到的聲納信號功率作出選擇。同時, 聲納浮標和吊放聲納的信號變化特征和艦艇是有區別的, 聲納浮標是固定在海面上的, 所以信號方位、距離基本不變;吊放聲納的信號則是不連續的、方位距離變化較快;而水面艦艇的主動聲納信號一般情況下都是連續的方位距離變化。所以, 魚雷所加裝的信號判別裝備在聲納信號變化特征上也可以作出辨別, 從而避免了聲納浮標、吊放聲納等干擾。
綜上所述, 聯合制導下的反主動聲納魚雷能夠做到目標信息識別及連續的目標導引, 而且能夠在發現敵主動聲納脈沖信號的第一時間內發射魚雷, 縮短了準備時間, 真正做到先敵發現、先敵攻擊, 可大大提高潛艇的攻擊和反擊能力。
2.2 作戰流程
反主動聲納魚雷攻擊目標示意見圖2。假想反艦主動聲納魚雷作戰使用流程如下。
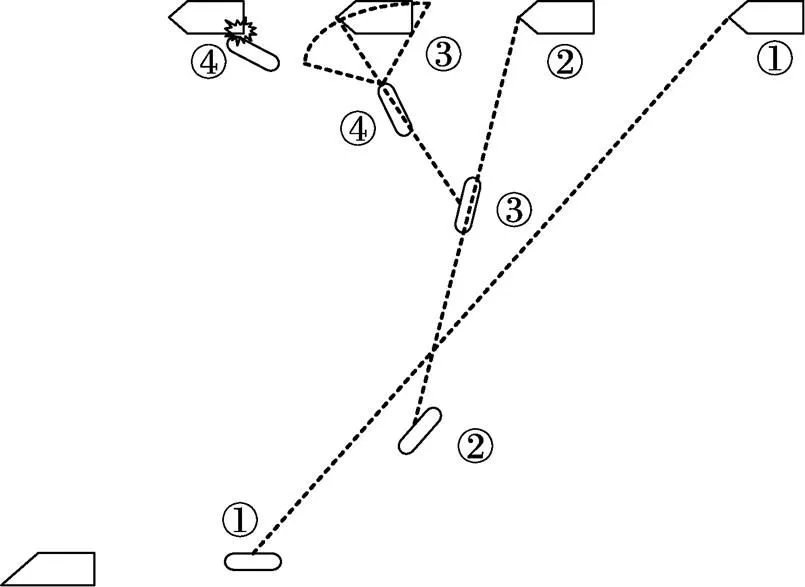
圖2 反主動聲納魚雷攻擊目標示意圖
第1步, 潛艇遠距離發現目標主動脈沖信號, 偵測并判明目標主動脈沖的頻率及目標距離在魚雷射程內, 將魚雷舷側陣的接收頻率設置為寬頻, 并設定被動自導開機距離, 潛艇向目標方位或以一定的提前角發射魚雷。魚雷正常出管后, 解除保險進入直航階段。
第2步, 魚雷舷側陣開始工作, 按照預定輸入的目標主動聲納脈沖信號的頻率范圍, 檢測主動聲納脈沖信號并朝向輻射源做連續的徑向運動。當魚雷左(右)舷接收到脈沖信號時, 魚雷向左(右)修正航向, 并向目標接近, 而接收陣接收在垂直方向接收到信號時, 魚雷便在垂直方向做變深運動。
第3步, 隨著目標的運動, 目標與魚雷的陣位發生變化, 魚雷舷側陣又接收到目標的主動脈沖信號, 魚雷繼續向目標方位導引, 不斷接近目標。
第4步, 魚雷航行至被動自導開機距離時, 被動自導開機, 當檢測到目標輻射噪聲時, 優先轉入被動聲自導工作, 直至命中目標。
2.3 技術特點
導彈反輻射技術發展成熟并在多次實戰中使用, 起到了不可磨滅的作用[3]。很顯然聯合制導方式下的反主動聲納魚雷在潛艇對抗水面艦艇中, 也將會起到舉足輕重的作用。這里探討的聯合制導方式下反主動聲納魚雷具有以下特點。
2.3.1 戰術使用靈活。反主動聲納魚雷利用的是反輻射技術跟蹤目標, 在發現有目標主動脈沖時, 可以利用反輻射技術引導至目標附近, 并最終轉為被動聲自導或主動聲自導準確攻擊目標, 而在未發現有目標主動脈沖的條件下則可以按照現有魚雷攻擊模式進行攻擊。
2.3.2 攻擊目標距離遠, 攻擊反應時間短。只要目標不停止發送主動脈沖信號, 魚雷便能自動尋的, 直至攻擊目標。這種攻擊模式, 對目標要素的要求不高, 只需在魚雷發射前將目標主動脈沖信號頻率或頻率范圍輸入至魚雷, 而不需要通過較長時間的機動獲得目標的運動要素。特別是潛艇與反潛水面艦艇對抗時, 反潛水面艦艇通常采用變向變速機動搜潛, 若發現水面艦艇主動聲納脈沖, 潛艇可不解算目標要素, 立即發射反主動聲納魚雷, 實現快速攻擊。
2.3.3 反主動聲納魚雷的工作原理決定了它出管后只能攻擊正在發射主動聲納脈沖的目標。因此, 反主動聲納魚雷必須有輻射源才能正常工作, 也就是說, 如果目標停止發射主動聲納脈沖信號, 那么反主動聲納魚雷必須改換成其他的制導方式, 其攻擊效能必然要降低。
2.3.4 在現代戰爭中面臨的信號環境極為復雜, 主動脈沖信號源較多, 這就要求魚雷信號接收器要有較高精度, 并且能夠對接收到的主動聲納信號進行辨別, 同時要對目標主動脈沖聲納以及其頻率加強數據搜索。
2.3.5 由于反潛魚雷多使用主動聲制導方式, 因此, 反主動聲納魚雷可以用于潛艇自身防御, 是對來襲魚雷進行硬殺傷的有力武器。
3 結束語
根據以上探討, 反主動聲納魚雷的作戰特點是比較符合攻擊實際和作戰需要的。但也只是對該型魚雷的初步設計和作戰使用的探討, 要想真正列裝部隊、在實際海戰中使用, 仍需要在魚雷總體結構和目標識別能力、識別敵我能力、真目標和假目標(如聲納浮標)區分能力以及信號處理及魚雷導引等技術方面做深入研究。
[1] 夏佩倫,李本昌. 聲納丟失目標時線導魚雷的導引方法[J]. 彈道學報, 1999, 11(4): 58-62.
Xia Pei-lun, Li Ben-chang. Wired Torpedo Guidance When Sonar Loses Contact with Targets[J]. Journal of Ballistics, 1999, 11(4): 58-62.
[2] 管旭軍, 康錫章, 石偉峰. 抗反輻射導彈技術研究[J]. 艦船電子對抗, 2004, 27(1): 34-37.
Guan Xu-jun, Kang Xi-zhang, Shi Wei-feng. Study on The Techniques of Antagonizing Antiradiation Missile[J].2004, 27(1): 34-37.
[3] 劉黎明, 殷宏沛. 反輻射導彈對抗技術研究[J].飛航導彈, 2003(10):42-45.
[4] 王金華, 嚴衛生, 劉旭琳.自主水下航行器測試與研發技術新進展[J]. 魚雷技術, 2010, 18(3): 202-208.
Wang Jin-huang, Yan Wei-sheng, Liu Xu-lin. Develop- ment of Testing and Verification Techniques for Autono- mous Underwater Vehicles[J]. Torpedo Technology, 2010, 18(3): 202-208.
[5] 付欣, 張靜遠, 高永琪. 魚雷制導與控制發展的回顧與展望[J]. 艦船科學技術, 2007, 29(5): 48-50, 55.
Fu Xin, Zhang Jing-yuan, Gao Yong-qi. The Review and Expectation About the Development of Torpedo′s Gui- dance and Control[J]. Ship Science and Technology, 2007, 29(5): 48-50, 55.
Discussion about Anti-active Sonar Torpedo Based on Combined Guidance Way
QIAN Zhong-ming
(92858thUnit, The People′s Liberation Army of China, Ningbo 315812, China)
Guidance of submarine- launched anti-ship torpedo is influenced by sea environment, whichrestricts the submarine attacking distance and the torpedo homing distance. As a result, the author makes use of the design con- ception of anti-radiation missile to present a new combined guidance based on target detection and other guidance ways. The anti-active sonar torpedo adopting the proposed combined guidance takes active sonar pulse signals from anti-submarine ship and torpedo as its guiding source in attacking target. In addition, the design principle and charac- teristics of the anti-active sonar torpedo with the combined guidance are addressed, and its operation process is supposed. The analysis shows that the anti-active sonar torpedo with the proposed combined guidance meets the requirements for actual attack.
anti-active sonar torpedo; combined guidance; anti-radiation technology
TJ631.2
A
1673-1948(2012)01-0024-04
2010-10-29;
2011-06-29.
錢忠明(1965-), 男, 高級工程師, 長期從事潛射魚雷作戰使用研究.
(責任編輯: 楊力軍)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
