爬壁機器人吸盤傳感系統設計*
2012-04-24 00:53:34袁浩浩張聯盟
傳感技術學報 2012年2期
袁浩浩 ,張聯盟
(1.廣西工學院計算機工程系,廣西 柳州545006;2.武漢理工大學信息工程學院,武漢430070;3.華南理工大學機械與汽車工程學院,廣州510640)
爬壁機器人是可以在垂直壁面或者斜面上靈活移動,代替人工在極限條件下完成多種作業任務的自動化機器人[1]。它與各種傳感器技術相結合,使機器人具有一定的自主探測能力。實現機器人自動控制,自我調節,具有自主攀爬能力,是爬壁移動機器人的重要發展方向。爬壁機器人按照吸附方式可分為真空吸附機器人和磁吸附機器人兩種[2]。真空吸盤則是真空吸附式爬壁機器人的重要組成部分,為了實現機器人的可靠吸附除了對吸盤吸附力和壁面狀況有要求外還與吸盤與吸附面之間的貼合狀況有關系。現有爬壁機器人通過在吸盤上安裝接觸傳感器[3-6]來探測吸盤和吸附面的接觸狀況,這些需要吸盤接觸到吸附面產生信號后才能判斷調節各關節使吸盤與吸附面緊密貼合,需進行多次試探[7],沒有實現在接近過程中對各關節的調整,因而會產生一定的冗余動作。超聲波測距是一種非接觸式檢測方式[8],本文采用一種非接觸式三角布局的超聲波測距模塊對吸盤與吸附面的姿態進行探測,在測量出吸盤和吸附面之間的距離、傾角等吸盤位姿信號后根據逆運動即可算出各關節調節量,實現在運動過程中對各關節進行調整來使吸盤與吸附面緊密貼合,具有快速性、實時性并且無冗余動作的特點。
1 吸盤上傳感系統
在吸盤上安裝各種傳感器,通過對各信號的采集分析及時調整吸盤姿態來實現吸盤的可靠吸附。機器人結構[9-10]和吸盤上傳感器布置如圖1所示,吸盤組是由三個小吸盤組成,三個超聲波傳感器分別布置在A、B、C三處,用來測量吸盤與吸附面之間的距離和吸盤與吸附面之間的夾角,用來控制調節機器人各關節運動量。E處的氣壓傳感器用來測量吸盤內部氣壓,檢測吸盤內部的真空度,保障吸盤可靠吸附。D為傾角傳感器,配合超聲波測距傳感器可以實現任意角度的斜面過渡。各信號的主控電路和傳感器的降壓、AD轉換、濾波、和真空泵電磁閥驅動等電路都集成在吸盤上,方便信號采集和控制。

圖1 機器人結構和吸盤傳感器布局圖
2 傳感系統設計
為了增強機器人控制的實時性,使用兩塊C8051F040單片機分別安裝在兩個吸盤足部,對各傳感器信號進行采集處理,根據上位PC下傳的控制命令,通過UART方式將信號回傳給PC,PC根據傳來的信號數據對各關節進行調節控制,然后進一步下達控制命令。C8051F040單片機主頻為24MHz,帶有4通道12位分辨率的逐次逼近寄存器型ADC,硬件實現的I2C和兩個UART串行接口,工作電壓為2.7 V~3.6 V。傳感系統如圖2所示。
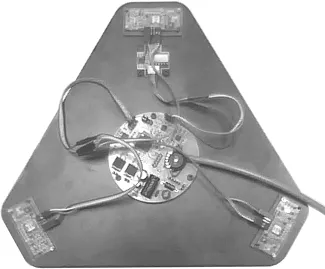
圖2 傳感系統模塊
2.1 超聲波測距傳感器
超聲波測距傳感器采用正三角布局不僅可以檢測吸盤與吸附面之間的距離而且通過計算還可以得出吸盤與吸附面之間的夾角,這樣就可以得出吸盤在將要吸附的點的位置和姿態,通過逆運動學方程可求出各個關節的調節量。吸盤能可靠吸附的必要條件是各個吸盤與壁面緊密貼合,不能有任何漏氣。首先要求壁面必須是光滑的;其次,當吸盤模塊中的一個吸盤邊下壓,另外兩個吸盤緊密貼合壁面時,如圖3(a)所示,可使吸盤模塊與壁面呈一定夾角α,則吸盤模塊與壁面夾角在0~α以內都可以使吸盤可靠吸附。如圖3(b)所示,已知各吸盤腔內深度為h=7 mm,半徑 r=125 mm,吸盤模塊半徑 R=130 mm,由此可以計算出:


圖3 吸盤傾斜吸附示意圖
超聲波測距傳感器采用URF01-I2C模塊實時的測出距離,根據距離值則可以計算出吸盤模塊和壁面之間的夾角,從而可以確定吸盤模塊末端吸附時的姿態,來調節各個關節使其達到吸附條件。已知超聲波傳感器組成的三角形邊長為d,測出的距離值分別為l1、l2和l3,吸盤和吸附面的夾角為θ,則根據余弦定理、攝影定理等推導出夾角θ:

由上可知,超聲波測距傳感器測出的距離其中之一每變化1 mm,則計算出來的角度變化0.3°。也就是說超聲波測距距離差兩兩之間不能大于4 mm,否則θ>α,吸盤模塊將無法吸附。所以,吸盤與吸附面接觸判斷條件為:
(1)超聲波測距傳感器測出的距離在46 mm~50 mm(因為超聲波傳感器布置在距吸盤底部50 mm處);
(2)θ≤α,即θ不能大于α,否則將無法吸附;
(3)當 n=4-θ/0.3(n 四舍五入取整數),超聲波測距傳感器測出的結果必須有一個為46+n,其他在46 mm~50 mm之間,以保證傾角較大時距離兩兩之差不超過4 mm。
2.2 氣壓傳感器
吸盤與吸附面的接觸狀況最終需要氣壓傳感器來驗證,當吸盤腔內真空度滿足一定條件即可說明吸盤與吸附面接觸良好。氣壓傳感器采用Freescale公司的MPX5100來檢測吸盤內部真空度,是一種壓阻式傳感器,在0℃ ~80℃最大誤差為2.5%,輸出電壓與氣壓呈線性關系。由于C8051F040單片機輸入電壓為3 V,MPX5100最大輸出電壓為5 V,所以需要在單片機與氣壓傳感器之間加一個用LMV358構成的比例運算電路來降壓。使用方法是將氣壓傳感器信號經過濾波降壓傳給單片機,用最小二乘法進行標定,保證信號采集的精度。在實際中吸盤內部氣壓達到40 kPa就可以滿足吸附要求,因此當吸盤內部氣壓能穩定的下降到40 kPa以下即可說明吸盤與吸附面接觸良好,吸盤能可靠的吸附。氣壓值大于40 kPa時說明未可靠吸附,吸盤與吸附面接觸不良或者吸附面不平整。
2.3 傾角傳感器
采用VTI公司的SCA100T-D02傾角傳感器,配合超聲波測距傳感器來實現任意角度的壁面過渡和對吸盤姿態進行輔助測量。SCA100T-D02是雙軸傾角測量,測量范圍為0°~90°,具有高分辨率、低噪聲和抗震性。爬壁機器人大多數工作在垂直方向的壁面上,所以傾角傳感器垂直布置在吸盤上方便測量。此傳感器是電壓輸出型傳感器,為了提高測量精度采用分段直線擬合[11]的方法。先對傳感器進行標定,分別多次測出 0°、30°、45°、60°、90°的ADC電壓轉換值,求取各點平均值;再分別在0°~30°、30°~45°、45°~60°、60°~90°之間采用最小二乘法擬合出一條直線。實際測量時,在相應的直線段內對測量值進行修正即可得出實際角度值。此方法在一定程度上提高了測量精度。
3 系統軟件設計
傳感系統有序的運行離不開軟件系統。單片機初始化后等待PC命令,當接受到命令后進入相應的程序段內。在采集傳感器信息時,由于事先對各傳感器進行過標定,所以直接對采集數據進行校正處理。然后通過串口將數據傳給上位機PC,由于超聲波測距模塊可以測出吸附點的位置和姿態,再配合傾角傳感器,所以PC可計算出機器人各關節調節量,控制機器人攀爬、壁面過渡、吸附和判斷障礙物等。單片機主程序流程圖見圖4。

圖4 主程序流程
串口通信波特率為9 600 bit/s,用來接收PC傳來的命令和向PC機發送各傳感器采集到的信號。
4 實驗分析
超聲波測距模塊回波的能量大小受入射角、反射面大小、形狀和材質、空氣的濕度和溫度等因素決定[12],下面對實驗數據(表1)進行分析。

表1 超聲波傳感器實驗數據
表1數據說明在35 mm~65 mm之間,傾角越小測出的距離值越準確,誤差在1 mm以內;距離越大傾角越大時測出的距離值越失真。因此吸盤模塊貼合墻面不可能一步實現,需要多次測量逐步逼近。
步驟如下:
(1)測距得出吸盤與墻面的夾角和距離值,以測出最短的距離值的1/2算出各關節調整量;
(2)按照關節調節量運動到新的位置;
(3)重復1,2過程直至吸盤貼近墻面并符合吸附條件;
(4)吸附并檢查氣壓是否滿足可靠吸附時的氣壓要求,不滿足時檢查壁面是否有縫隙或者障礙物。
氣壓傳感器和傾角傳感器的測試結果如表2所示,從測量數據可見也能夠滿足系統要求。

表2 氣壓傳感器和傾角傳感器性能指標
機器人根據各關節內部的光電碼盤可以計算出當前位置和姿態,通過超聲波測距模塊可以計算出將要吸附點的位置和姿態,從而通過計算各關節調節量,按照上述步驟即可完成任意夾角的壁面過渡。
在實際實驗中,機器人能夠實現吸盤與吸附面的可靠吸附和任意夾角的壁面過渡。
5 結論
自主攀爬是仿生爬壁機器人發展的趨勢,而傳感器則是機器人的觸角。本文設計了正三角布局的超聲波測距傳感器系統、傾角傳感器和氣壓傳感器組成的真空吸附式爬壁機器人吸盤的傳感系統,采用C8051F040單片機作為各傳感器的主控單元,完成了對吸盤位置、姿態等信息采集,結合上位機PC實現了非接觸式的吸盤與吸附面狀況探測和任意夾角壁面之間的過渡,具有貼近吸附面速度快、無冗余動作等特點,為爬壁機器人自主攀爬打下基礎。
[1] 付宜利,李志海.爬壁機器人的研究進展[J].機械設計,2008,25(4):1-4.
[2] 肖立,佟仕忠,丁啟敏,等.爬壁機器人的現狀與發展[J].機器人,2004,11:81-84.
[3] Xiao Jizhong,Hans Dulimarta,Yu Zhenyu,et al.DSP Solution for Wall-Climber Micro-Robot Control Using TMS320LF2407 Chip[C]//IEEE Midwest Symp on Circuits and Systems:1348-1351,2000.
[4] Li Man-tian,Sun Li-ning,Li Yang.Workspace and Passable Environment Analyse of a Underactuated Inchworm-Like Micro-Robot[C]//IEEE Int.Conf.on Mechatronics & Automation,1741-1744,2005.
[5] Jun Xiao,Jizhong Z.Fuzzy Controller for Wall-Climbing Microrobots[C]//IEEE Transactions on Fuzzy Systems,pages 466 -480,2004.
[6] 王洪光,姜勇,房立金.雙足爬壁機器人壁面凹過渡步態規劃研究[J].智能系統學報,2007,2(4):40-45.
[7] Jiang Yong,Wang Hongguang,Fan Lijin.A Novel Approach to Fault Detection and Identification in Suction Foot Control of a Climbing Robot[C]//IEEE Int.Conf.on Intelligent Robots and Systems,pages 3423-3428,2006.
[8] 唐穎,張凡,郭勇.移動機器人的超聲波測距傳感器設計[J].傳感技術學報,2010,23(11):1646-1649.
[9] Zhu Haifei,Guan Yisheng,Cai Chuanwu,et al.W-Climbot:A Modular Biped Wall-Climbing Robot[C]//IEEE Int.Conf.on Mechatronics and Automation,pages 1399-1404,2010.
[10] Guan Yisheng,Shi Xuechao,Zhou Xuefeng.A Novel Mobile Robot Capable of Changing Its Wheel Distance and Body Configuration[C]//IEEE Int.Conf.on Robotics and Biomimetics,pages 806 -811,2009.
[11]袁浩浩.一種DSP內部數模轉換器的采樣精度校正與范圍提高的方法[C]//中國通信國際會議論文,2010.
[12]章小兵,宋愛國,唐鴻儒.基于單接收頭的超聲波多目標測距[J].傳感技術學報,2007,20(5):1167-1170.