基于偏差模型的導彈發(fā)射動力學仿真
2012-03-19 08:22:34賀衛(wèi)亮
北京航空航天大學學報 2012年8期
關鍵詞:模型
康 甜 賀衛(wèi)亮
(北京航空航天大學 宇航學院,北京 100191)
導彈發(fā)射動力學研究的重點是分析各種干擾因素對初始擾動的影響.初始擾動是由發(fā)射裝置和導彈的剛度、發(fā)動機推力偏心、結構安裝誤差、導軌長度、導軌導向面的平直度、定向器的結構型式、發(fā)射間隔次序、燃氣流沖擊和載體運動等因素共同決定的.
以往文獻關于發(fā)射動力學初始擾動的分析,通常是直接建立含干擾影響的實際彈道的動力學和運動學方程[1-5],在進行不同對象、同類問題的分析計算時需要重新推導相應的方程.
本文提出一種建立導彈發(fā)射動力學仿真系統(tǒng)的新思路,將導彈相對于標準受力狀態(tài)的力和力矩偏差從動力學方程中分離出來,根據(jù)偏差的來源分別建立相應的偏差模型.各項偏差力和標準力疊加即為導彈實際受力,然后將合力、合力矩直接應用于六自由度運動方程,求解導彈的運動狀態(tài).針對某艦載傾斜發(fā)射導彈,仿真分析了推力偏心、導軌不平度、船速和船體縱搖等干擾因素對初始擾動的影響.并通過統(tǒng)計方法,進行了5 000次數(shù)值打靶模擬分析.
1 動力學模型
導彈的運動狀態(tài)是由導彈所受外力決定的.干擾因素的存在會直接影響導彈受力,引起力和力矩的偏差,進而導致運動狀態(tài)的改變.傳統(tǒng)的發(fā)射動力學仿真是直接將干擾項代入運動學或動力學方程中來建立數(shù)學模型的.仿真對象改變,就需要重新建立相應的動力學和運動學方程.
對于不同類型的導彈,其理想發(fā)射狀態(tài)都是相似的,主要的不同之處在于干擾的來源.例如,艦載發(fā)射時有艦船姿態(tài)角速度的影響,而陸基發(fā)射時則沒有這一干擾.
針對這種情況,本文提出了基于偏差模型來建立發(fā)射動力學仿真系統(tǒng)的方法.首先根據(jù)發(fā)射系統(tǒng)組成建立標準模型,其次需要根據(jù)發(fā)射系統(tǒng)的特征確定相應的偏差模型組成,然后選擇運動狀態(tài)求解器,組成完整的仿真系統(tǒng).
導彈發(fā)射系統(tǒng)的特征包括發(fā)射裝置結構形式、發(fā)射動力類型、發(fā)射姿態(tài)、發(fā)射載體等.
1.1 發(fā)射系統(tǒng)組成
本文針對某艦載傾斜發(fā)射導彈,建立了存在發(fā)射臂振動、推力偏心偏斜、艦船運動、導軌不平4種干擾情況下的偏差模型,選擇了六自由度剛體彈道方程作為運動求解器.
如圖1所示的艦載傾斜發(fā)射導彈,彈身前后有兩組定向支撐元件,與導軌緊密接觸,且前后定向元件同時離軌.發(fā)射臂上有兩條平行導軌,發(fā)射臂一端固定在艦船上.艦船沿航向為勻速平動,其余5個自由度均存在隨機運動.
圖1 發(fā)射系統(tǒng)模型組成
1.2 標準模型
標準模型是不存在干擾的理想發(fā)射狀態(tài)下導彈的受力模型.標準模型基本假設為
1)導彈和發(fā)射架本體均為剛體,導軌表面絕對平直、無振動、無推力偏心偏斜、無風干擾.
2)導彈在約束段內(nèi)沿導軌側向和縱向的平動自由度和全部轉動自由度都受到完全約束.
3)前后支點處受到的支反力僅有垂直導軌向上的分量,推力和摩擦力均沿導軌向后.
4)在導彈發(fā)射過程中,忽略氣動力的影響.
標準模型中主要計算的是推力、重力、支反力和摩擦力及其對質心的力矩.其中,重力和推力均過質心,力矩為零.標準模型適用于各種類型的有軌發(fā)射.
艦載導彈發(fā)射的標準模型在基本假設的基礎上,假定艦船作勻速直線運動,且姿態(tài)恒定.則導彈受力滿足以下關系.
在發(fā)射坐標系下,所有外力Si的和均沿x方向.

所有外力Si對質心的力矩和為0.

初始時刻導彈質心速度v0和姿態(tài)角σ0為

式中,vs0和 σs0分別為艦船速度、姿態(tài)角;χs為發(fā)射架相對于艦船的安裝角.
1.3 偏差模型
偏差模型是存在干擾的實際發(fā)射狀態(tài)下,導彈受力相對于理想狀態(tài)的模型.
為了分析導彈所受外力之間存在的相互作用關系,將導彈受力分為主動力和被動力兩類.主動力是導彈本體的慣性力或特征力,不受其他力的影響.例如,重力和推力屬于主動力.被動力是由其他力變化導致的力.例如:支反力、摩擦力屬于被動力.任意一個主動力的變化都會引起被動力的變化.
在此基礎上,可以將被動力進一步細分,定義一級被動力為只受主動力影響的力,例如,支反力和氣動力;定義二級被動力為直接受一級被動力影響的力,例如,摩擦力,它大小是由支反力決定的.
在標準模型中,若推力保持常值,則導彈受力基本是恒定的.而存在干擾的情況下,力與力之間的影響主要體現(xiàn)在偏差傳遞上,如圖2所示.重力和推力的偏差分別會引起支反力的偏差,進而引起摩擦力的偏差.
總的支反力偏差中還有一部分來源于基座的運動、發(fā)射臂振動以及軌面不平度引起的慣性力,這部分偏差也會傳遞給摩擦力,引起摩擦力的偏差.
圖2 偏差傳遞關系
根據(jù)以上傳遞關系,導彈發(fā)射動力學仿真系統(tǒng)中的偏差模型至少包含重力偏差、推力偏差、支反力偏差和摩擦力偏差4個部分.
每一部分分別計算相應的偏差力和對導彈質心的偏差力矩.其中,支反力偏差還需要進一步細分,既有重力和推力傳遞的偏差,還要考慮發(fā)射臂振動、基座運動和導軌不平等引起的偏差.
本文建立的艦載導彈發(fā)射的偏差模型中,略去了重力偏差,因而只有3個部分:推力偏差、支反力偏差和摩擦力偏差.
1.3.1 推力偏差
推力偏差通常是由加工和裝配公差引起,包括推力偏心距、偏心角等,如圖3所示.
圖3 推力偏差角度定義
設推力的大小為標稱值Pn,則理想情況下的推力在彈體坐標系下的分量為

推力的力偏差為
推力的作用點路徑偏差為
則,推力的力矩偏差為

1.3.2 支反力偏差
支反力偏差的來源包含推力偏差、發(fā)射臂振動、導軌不平度和基座運動.推力偏差會直接引起支反力偏差.而另外3項偏差來源首先引起導彈附加的運動,產(chǎn)生慣性力;然后將慣性力等效為作用在支點上的支反力,從而得到偏差.
發(fā)射臂振動、不平度以及基座運動引起導彈附加運動的數(shù)學模型在以往文獻[1-4]中均有詳細介紹,此處主要介紹如何將偏差運動等效為支反力和力矩偏差.
1)推力偏差的傳遞
當推力偏差存在時,根據(jù)導彈和發(fā)射架之間不脫離假設,支反力和推力必須滿足沿z向平動約束和繞y軸的轉動約束.由此可知,由推力偏差引起的前支點支反力偏差在發(fā)射坐標系下3個分量為
后支點支反力偏差的3個分量為
式中,上標E表示由推力偏差引起;f是導軌表面的摩擦力系數(shù).
在支反力偏差模型中,均認為作用點路徑不存在偏差,即Δr=0.
前后支點作用點路徑為
前后支點的支反力和力矩偏差的總和為

式中,V表示發(fā)射臂振動;U表示導軌不平度;B表示基座運動;下標i取1為前支點,取2為后支點.
2)振動引起偏差
在建立發(fā)射臂振動的支反力偏差模型時,將發(fā)射臂視為等截面的均質彈性懸臂梁,導彈為剛體.
已知某時刻導彈運動狀態(tài),可以根據(jù)運動約束求出當前作用在發(fā)射臂上的支反力.然后根據(jù)懸臂梁的振動方程求出下一時刻發(fā)射臂上前后支點處的位移、速度和加速度.最后計算出振動引起的等效支反力偏差,包括慣性力和科氏力.
慣性力等效為支反力偏差的計算方法如下:
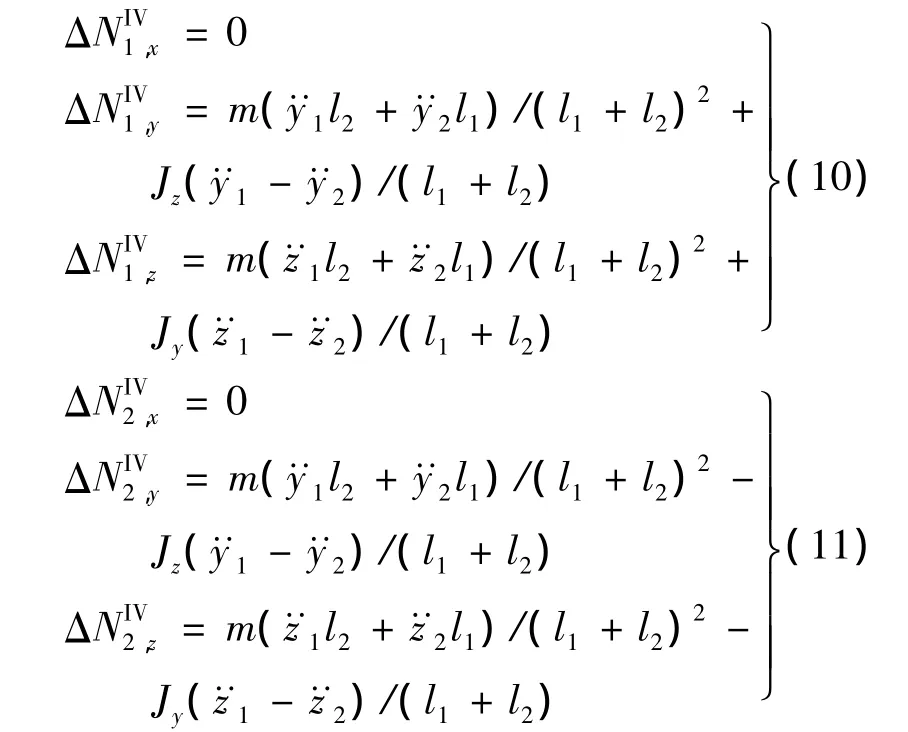
式中,m是導彈質量;x,y,z分別為前后支點在發(fā)射坐標系中的位置坐標,上標IV表示振動影響中慣性力的部分.
科氏力等效為支反力偏差的計算公式:
式中,vx為導彈質心速度沿發(fā)射坐標系x軸的分量;上標CV表示振動影響中科氏力的部分.
最后將部分疊加,則振動引起的支反力偏差為

3)不平度引起偏差
軌面不平度通常采用一個波紋函數(shù)來進行描述.波紋函數(shù)由幅值h和參考長度λ決定.

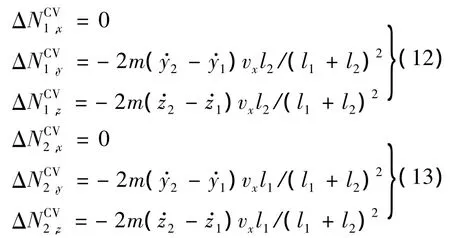
考慮沿發(fā)射坐標系y向導軌存在不平,則由該波紋函數(shù)可以確定導彈相對于平直導軌狀態(tài)的俯仰角速度偏差和質心加速度偏差.
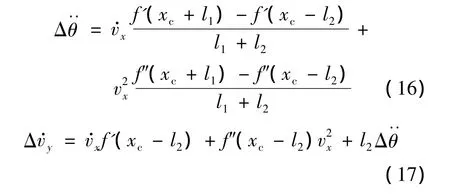
式中,xc是導彈質心的位置坐標;vy為導彈質心速度沿發(fā)射坐標y軸的分量.
將相應的慣性力和慣性力矩等效為支反力以及力矩偏差,有


此處給出的力和力矩偏差均是前后支點的合成.若沿z向也存在不平,且兩個方向不平度均較小時,可以分別計算等效支反力偏差,再進行疊加.
4)基座運動引起偏差
艦船的質心運動加速度為as,繞質心的角速度為ωs.由于海浪、海風的影響,這些量均為隨機產(chǎn)生.但對于一次發(fā)射過程,發(fā)射時間很短,可以認為在這一次發(fā)射過程中,以上參數(shù)是不變.
由艦船運動引起的導彈質心牽連加速度為

式中,rs為導彈質心到艦船質心的路徑矢量.
同時,艦船運動還會引起科氏加速度.

式中,vr為導彈質心相對于艦船質心的運動速度.最后將兩部分加速度等效為支反力偏差.

此處給出的力偏差是前后支點的合成.
1.3.3 摩擦力偏差模塊
在偏差模型中,假設摩擦力作用點路徑不存在偏差,且與支反力相同.則摩擦力偏差由支反力的偏差和作用點路徑?jīng)Q定.
在發(fā)射坐標系下,摩擦力和力矩偏差為

式中,f是動摩擦系數(shù);下標y和z分別表示對應方向的分量.
2 仿真系統(tǒng)方案
根據(jù)以上動力學模型,艦載導彈發(fā)射動力學仿真系統(tǒng)方案如圖4所示.整個仿真系統(tǒng)由3大部分構成:標準模型、偏差模型以及運動狀態(tài)求解器.
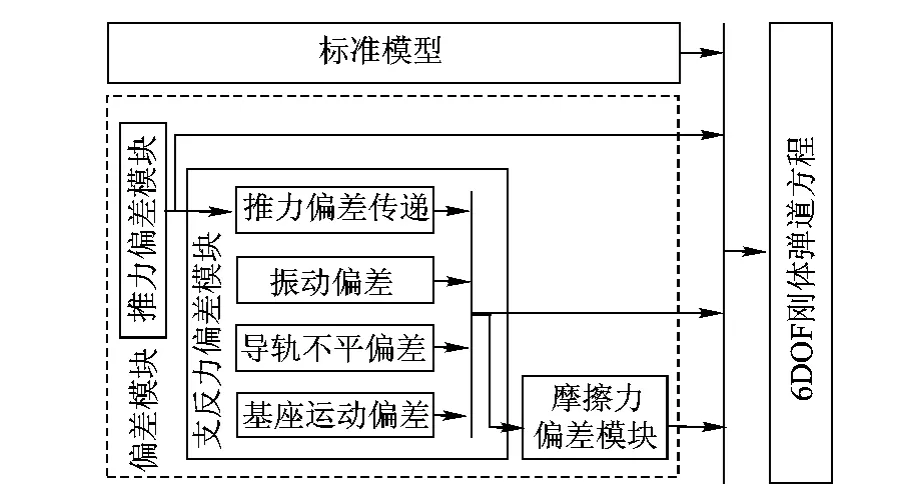
圖4 艦載導彈發(fā)射仿真系統(tǒng)方案
標準模型輸出理想發(fā)射狀態(tài)下導彈受到的力和力矩,而偏差模型中包含了多項不同干擾的子模塊,輸出的均為偏差力和力矩,運動狀態(tài)求解器為通用的六自由度剛體運動方程.將前兩部份的合力、合力矩輸入到運動狀態(tài)求解器中,即可求得導彈實際的運動狀態(tài).各模型以及子模塊之間的數(shù)據(jù)交換通過數(shù)據(jù)總線實現(xiàn).
仿真系統(tǒng)的搭建基于MATLAB/Simulink平臺.在實際的Simulink模型中還需要增加一些輔助功能模塊,如大氣模型、參數(shù)輸入、離軌判斷等.
3 仿真與分析
本文參照美國小獵犬系列(RIM-2)艦空導彈的性能參數(shù)進行了仿真分析.計算了發(fā)射臂振動、推力偏心、導軌不平、艦船運動等干擾存在的情況下,導彈離軌瞬時的彈道傾角偏差、俯仰角偏差和俯仰角速度.分析了不同干擾因素隨特征參數(shù)變化時,對初始擾動的影響.最后根據(jù)干擾因素的統(tǒng)計規(guī)律,給定相應的概率分布函數(shù),進行了數(shù)值打靶實驗.
設定導彈質量1 200 kg,推力240 kN.導彈幾何參數(shù)設置如表1所示.其中l(wèi)4是導彈質心到艦船質心的距離.

表1 導彈幾何參數(shù)設置
若不考慮任何干擾因素的影響,且艦船完全靜止的情況下,導彈離軌瞬時的彈道傾角和俯仰角為45°,俯仰角速度為0.
3.1 發(fā)射臂振動的影響
發(fā)射臂振動對初始擾動的影響如圖5所示,影響發(fā)射臂振動振幅的主要特征參數(shù)是截面的等效抗彎剛度.
隨著抗彎剛度EI的增大,導彈離軌瞬時的彈道傾角偏差、俯仰角偏差均逐漸減小,而俯仰角速度的變化則是先增大,在EI=90 kN·mm2附近逐漸減小.總體而言,發(fā)射臂的等效抗彎剛度達到70 kN·mm2時(相當于采用45號鋼,長寬均為22 cm,厚度約為5mm的矩形框架截面),單純由振動引起的初始擾動很小,不超過10-2量級.
3.2 推力偏心的影響
支反力是引起發(fā)射臂振動的直接作用力.推力偏心的存在會使得支反力改變,從而引起振動的變化,最終影響初始擾動.
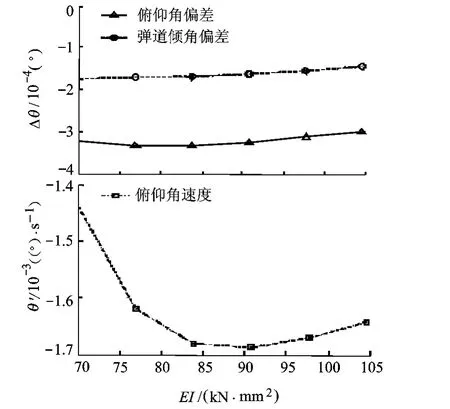
圖5 發(fā)射臂振動對初始擾動的影響
如圖6所示,導彈縱向平面內(nèi)推力偏心角δ'xy的大小,從 -20'變化到 +20';推力偏心角 δxy從-20'變化到-15'時,彈道傾角和俯仰角的偏差為正,且呈線性減小;從-15'到+20',偏差為負,絕對值逐漸增大.俯仰角速度也有相同的變化趨勢.-15'偏心角附近恰好構成一個平衡區(qū),使得推力偏心能夠抑制振動的影響.盡管向下的偏心角會產(chǎn)生一個向下的力分量,使支反力的總和增大;但這個向下的力分量對質心構成一個抬頭力矩,使得前支點支反力減小,而后支點支反力增大,發(fā)射臂受力向固定端集中,變形程度減小.當前支點的支反力減小到0甚至出現(xiàn)反向時,導彈離軌時的角度就會出現(xiàn)正偏差.
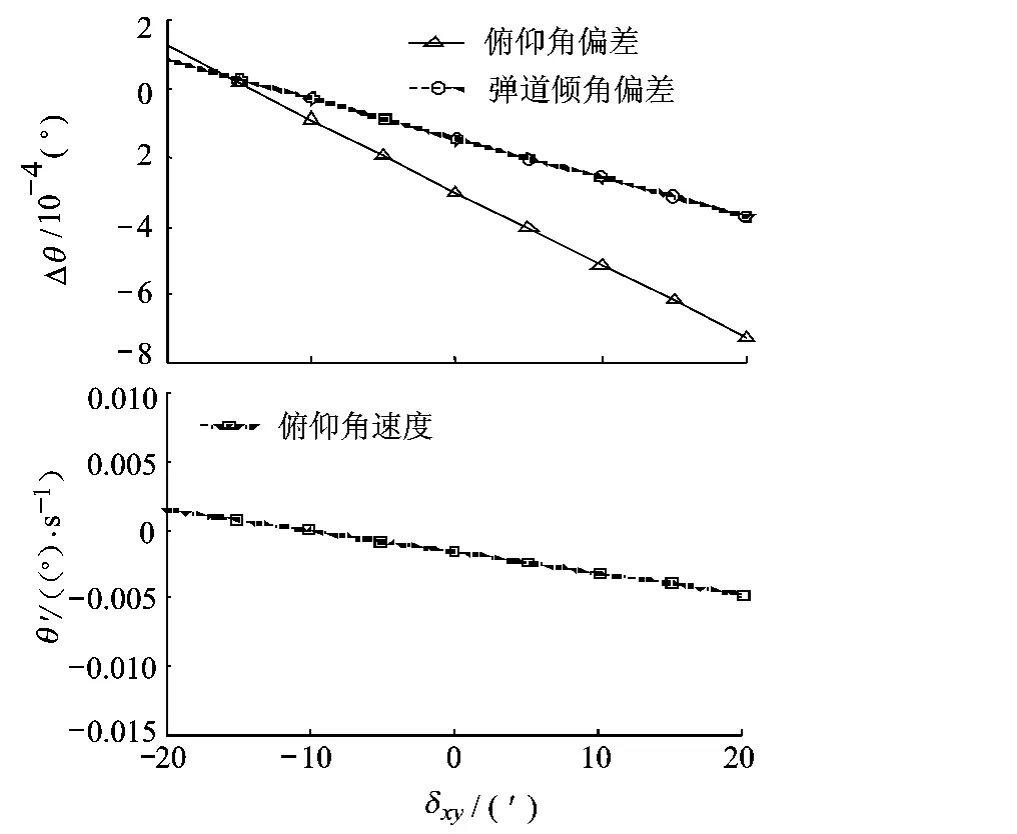
圖6 推力偏心對初始擾動的影響
3.3 導軌不平的影響
描述導軌不平度的特征參數(shù)有參考長度和幅值.在一個參考長度內(nèi),軌面最高點與最低點的差即為幅值.幅值的大小直接影響初始擾動.仿真時設置的參考長度為2m.
圖7是y向幅值從1mm增加到2mm時,角度偏差和角速度的變化.3個狀態(tài)參數(shù)均呈現(xiàn)出絕對值線性增大的趨勢.其中彈道傾角偏差的大小從 0.03°增大到了 0.06°,而俯仰角速度的大小從1.6(°)/s增加到了 3.2(°)/s.由此可知,幅值的變化主要引起彈道傾角和俯仰角速度的變化.
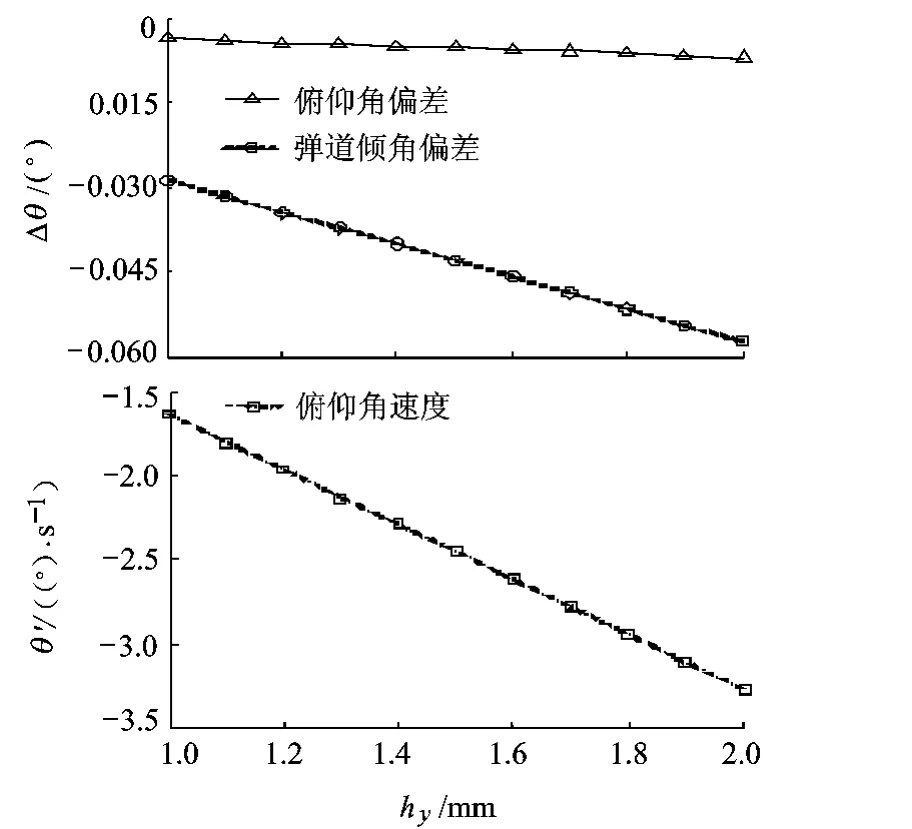
圖7 導軌不平對初始擾動的影響
3.4 艦船運動的影響
艦船運動包括了前退、升沉、橫蕩、縱搖、艏搖、橫搖共6種形式.船速和縱搖對導彈縱向平面內(nèi)的運動影響最大.
1)船速的影響
艦船勻速運動時進行發(fā)射,初始彈道傾角不等于發(fā)射角,初始擾動的偏差是指俯仰角和彈道傾角相對于標準狀態(tài)的偏差,而不是相對于發(fā)射角的偏差.
船速和導軌不平共同存在時,隨著船速的增加,兩個角度偏差以及俯仰角速度均呈現(xiàn)出周期性振蕩增大的趨勢.俯仰角和彈道傾角的偏差大致相差半個周期,而俯仰角偏差的增大速度明顯快于彈道傾角偏差.俯仰角速度的變化幅度最大.由于船速對初始擾動的這種周期性影響,使得在較高船速下進行發(fā)射成為可能.如圖8所示,Vs=9m/s時,彈道傾角偏差僅有 -0.01(°),而俯仰角速度僅有 0.38(°)/s
2)縱搖的影響
艦船的縱搖運動直接決定了導彈縱向平面內(nèi)的運動.
如圖9所示,艦船的縱搖運動對彈道傾角偏差的影響是隨著縱搖角速度絕對值的增大而減小的.縱搖角速度的存在,使得導彈在初始時刻就存在縱向速度分量,引起彈道傾角偏差,隨著質心速度的增大,彈道傾角偏差減小.因而彈道傾角在縱搖角速度θ's非常接近零時,彈道傾角偏差達到最大.θ's= -0.1(°)/s 時,彈道傾角偏差為 1.86°.θ's為負值時,彈道傾角偏差為正,這是由于導彈發(fā)射架安裝在船體的后部,船體向下轉動時,導彈的運動反而向上.俯仰角偏差的大小恰為艦船在發(fā)射過程中轉過的角度.
圖8 船速和導軌不平的共同影響
圖9 縱搖對初始擾動的影響
3.5 數(shù)值打靶統(tǒng)計分析
推力偏心、導軌不平、艦船搖晃,這一類干擾的大小通常是不可直接測量的,且有很大的隨機性.根據(jù)統(tǒng)計規(guī)律,這些干擾的分布通常表現(xiàn)為均值為0的正態(tài)分布.其標準差的選取可以根據(jù)加工裝配的公差要求確定,或者根據(jù)經(jīng)驗進行估計.
在進行數(shù)值打靶實驗時,選取了推力偏心角δxy,y向幅值hy和艦船的縱搖角速度θ's作為干擾源,其概率分布函數(shù)如表2所示.其中,幅值的定義要求必須為正值,因而對概率分布函數(shù)取絕對值.各分布函數(shù)的標準差是取前幾節(jié)仿真參數(shù)的最大值為95%置信區(qū)間得到的.
表2 干擾的概率分布函數(shù)
一次打靶實驗時,首先利用正態(tài)分布隨機函數(shù)產(chǎn)生干擾源,然后檢驗離軌點參數(shù)是否滿足命中要求.本文規(guī)定命中要求為同時滿足以下3個條件:①彈道傾角偏差小于1°;②俯仰角偏差小于2°;③俯仰角速度小于2(°)/s.
5000次數(shù)值打靶實驗結果如圖10所示.命中點分布集中在均值附近;在遠離均值處也有少量命中點存在.這與干擾源本身的正態(tài)分布是一致的.整體而言,當干擾源滿足表2的概率分布函數(shù)時,命中概率為93.86%.

圖10 數(shù)值打靶實驗命中點分布
4 結論
本文通過對某艦載導彈,采用基于偏差模型的發(fā)射動力學仿真系統(tǒng),仿真了導彈的發(fā)射過程,有效地進行了偏差分析,得出如下結論:
1)發(fā)射臂截面的等效抗彎剛度在70 kN·mm2以上時,振動引起的初始擾動非常小.但若同時存在推力偏心,振動引起的初始擾動會隨推力偏心角線性變化,當推力偏心角為-15'時,恰能抑制振動的影響.
2)存在導軌不平的情況下,不平度的幅值主要引起彈道傾角和俯仰角速度的變化.若同時艦船有向前的勻速運動,初始擾動則周期性振蕩增大,當船速為9m/s(17.5 kn)時,恰能使得這兩項偏差最小.
3)艦船的縱搖運動對彈道傾角偏差的影響隨著縱搖角速度絕對值的增大而減小.在縱搖角速度非常接近0時,彈道傾角偏差達到最大.縱搖角速度為 -0.1°/s時,彈道傾角偏差達到 1.86°.
4)5000次數(shù)值打靶實驗表明,在文中給定的干擾概率分布條件下,由離軌點參數(shù)確定的命中概率達到93.86%.
References)
[1] Dziopa Z,Krzysztofik I,Koruba Z.An analysis of the dynamics of a launcher-missile system on a moveable base[J].Bulletin of the Polish Acedemy of Sciences:Technical Sciences,2010,58(4):645-650
[2]張有濟.戰(zhàn)術導彈飛行力學設計[M].北京:宇航出版社,1998 Zhang Youji.Design of tactical missile flight dynamics[M].Beijing:Aerospace Press,1998(in Chinese)
[3]姚昌仁,唐國梁.火箭導彈發(fā)射動力學[M].北京:北京工業(yè)學院出版社,1987 Yao Changren,Tang Guoliang.Launching dynamics for rockets and missiles[M].Beijing:Beijing Institute of Technology Press,1987(in Chinese)
[4]薛明旭.戰(zhàn)術導彈發(fā)射動力學與仿真[D].西安:西北工業(yè)大學航天學院,2004 Xue Mingxu.Launch dynamics of tactical missile and simulation[D].Xian:College of Astronautics,Northwestern Polytechnical University,2004(in Chinese)
[5]陳進寶,張曉今,張管飛.地空導彈發(fā)射動力學建模與仿真研究[J].彈箭與制導學報 2010,30(1):65 -67 Chen Jinbao,Zhang Xiaojin,Zhang Guanfei.Research on launch dynamics modeling and simulating for surface-to-air missile[J].Journal of Projectiles,Rockets,Missiles and Guidance,2010,30(1):65-67(in Chinese)
[6]趙軍民,何亞娟.基于MATLAB/Simulink的彈道仿真模塊化設計[J].彈箭與制導學報 2007,27(1):147-149 Zhao Junmin,He Yajuan.The incorporate simulation of the missile trajectory based on MATLAB/simulink[J].Journal of Projectiles,Rockets,Missiles and Guidance,2007,27(1):147 -149(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19