基于ADAMS的車輛ESP控制模型及方法研究*
2012-03-09 08:14:18李勝琴
武漢理工大學學報(交通科學與工程版) 2012年6期
李勝琴 何 樂
(東北林業大學交通學院1) 哈爾濱 150040) (清華大學汽車安全與節能國家重點實驗室2) 北京 100084)
0 引 言
汽車電子穩定性程序(electronic stability program,ESP)通過控制車輪的制動力或發動機的輸出力矩,來控制汽車的橫擺角速度并將車輛的側偏角限制在一定范圍內,從而在汽車躲避前方突然出現障礙物、急轉彎車道上高速行駛以及低附路面等處于附著極限時,協助駕駛員控制汽車的操縱穩定性[1-2],防止車輛出現過度轉向、不足轉向或側翻等危險工況.
國內對ESP系統的研究起步較晚,大多數研究重心仍停留在控制策略的理論研究上,由于在汽車產品開發初期,無法實施基于整車動力學模型和底盤電控系統虛擬樣機的裝備ESP等底盤電控系統的汽車性能評價,整車廠商很難在產品設計階段對汽車電子供應商提出完善的產品設計技術要求,故無法開展對整車裝備電控系統后的性能預測分析控制;同時由于無法及時發現并解決控制系統設計中存在的問題,大大增加了整車廠商與汽車電子供應商的底盤電控系統匹配設計周期和研發成本.
本文針對某型車建立ADAMS與MATLAB聯合仿真模型,建立基于橫擺角速度的ESP控制方法,并對控制結果進行仿真研究,探討ESP系統評價方法及評價體系的合理性及有效性.
1 ESP系統組成及工作原理
比較典型的汽車ESP控制系統包括傳統制動系統、傳感器(輪速傳感器、轉向盤轉角傳感器、側向加速傳感器、橫擺角速度傳感器、制動主缸壓力傳感器)、液壓調節器、汽車穩定性制電子控制單元(ECU)和輔助系統(發動機管理系統)[3-4].
目前市場上的ESP系統基本上都是采用差速制動作為控制方式.如圖1所示,ESP系統通過傳感器檢測車輛的實際運行狀態,與駕駛員操作意圖進行比較,來判斷車輛是否處于穩定的行駛狀態.進而決定是否進行制動調節.首先系統判斷汽車處于過多轉向還是過度不足轉向,當汽車處于過多轉向時,通過對前外車輪施加制動產生與汽車轉向運動方向相反的橫擺力矩,從而抑制汽車的過多轉向運動;當汽車處于不足轉向時,則通過對后內側車輪施加制動產生與汽車轉向運動方向相同的橫擺力矩,抑制汽車的不足轉向運動.
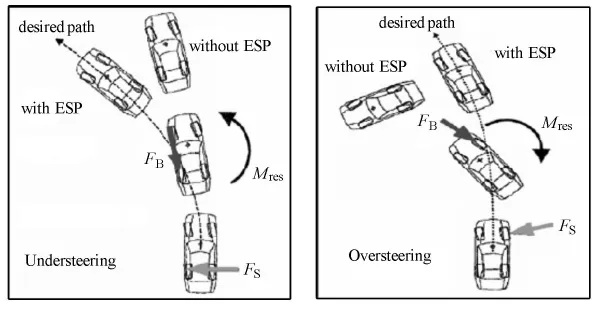
圖1 ESP控制系統原理圖
本文將橫擺角速度作為監測狀態,進而判斷車輛的運行狀態,利用模糊控制理論進行ESP系統控制,考察該控制系統的有效性與合理性.
2 車輛模型
2.1 虛擬樣機模型
為了進行ESP控制系統的仿真研究,首先需要對原型車進行適當簡化,建立ADAMS/Car虛擬樣機模型.ADAMS/Car整車虛擬樣機模型,通常包括前/后懸架系統、轉向系統、發動機、車身、輪胎模型等子模型及路面等外部約束.
原型車前懸架為高置雙A臂、后懸架為E型多連桿式.根據實際測量結果,在ADAMS/car中建立如圖2的包含轉向系、橫向穩定桿的前/后懸架模型.
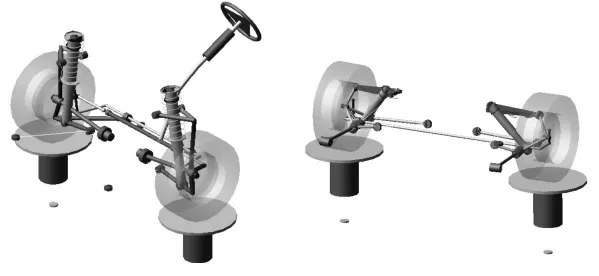
圖2 虛擬樣機前、后懸架模型
車輛的轉向系統、發動機、車身及橫向穩定器等子系統,可以在ADAMS/Car自帶模板的基礎上按照原型車參數進行修改.車輛的各子系統完成之后,裝配成如圖3的整車虛擬樣機模型.
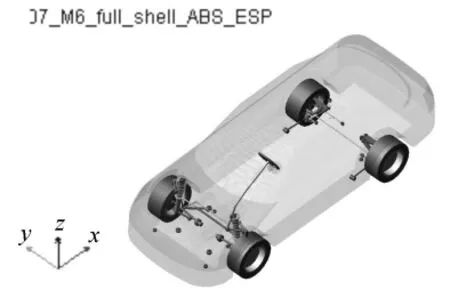
圖3 整車虛擬樣機模型
車輛的輪胎模型選用Pac2002魔術公式模型,利用輪胎試驗數據擬合出適用于ADAMS/Car軟件所需的參數,建立模型.利用路面建模器建立二維平坦路面.利用路面參數和車輛模型參數共同模擬實際路面附著系數的變化.
為了驗證所建立的模型,進行車輛雙移線試驗模擬,并將模擬結果與實車試驗結果進行對比,見圖4.可以看出試驗曲線與模擬曲線吻合程度較好,認為所建立整車樣機模型能夠反映車輛的基本特性,可以用于進行車輛操縱穩定性及ESP控制系統的模擬仿真分析.
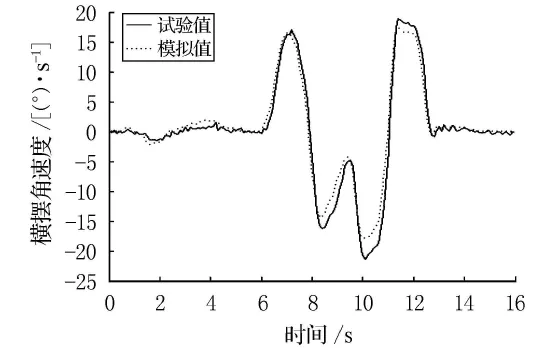
圖4 雙移線試驗與模擬分析對比
2.2 聯合控制模型
為了進行ESP控制系統聯合仿真,需要將在ADAMS/Car中建立的虛擬樣機模型轉化為S-function,到 Matlab/Simulink軟件環境下中進行 閉 環 控 制 仿 真[5-6].圖 5 為 ADAMS/Car 和Matlab/Simulink的ESP聯合仿真模型,即首先從整車虛擬樣機模型得出車輛橫擺角速度等狀態參數,然后與參考模型計算出的期望橫擺角速度進行比較,判斷車輛的穩定狀態,從而對相關車輪制動.
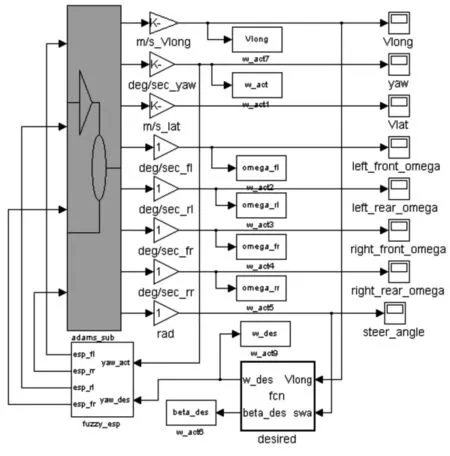
圖5 ADAMS/car和 matlab/Simulink的ESP聯合仿真模型
圖中adams_sub模塊是由ADAMS/Car導出的虛擬樣機S-function模塊,該模塊包含了整車的全部信息.其中,在建整車子部件時已定義了輸入和輸出狀態變量,如在建制動器模型時定義各個車輪的制動壓力為輸入狀態變量,在建車身時定義其橫向速度、縱向速度、橫擺角速度為輸出狀態變量,在建車輪時定義輪速為輸出狀態變量,在建轉向系統時定義轉向盤轉角為輸出狀態變量.desired模塊為線性二自由理想模型,用于完成汽車期望狀態參數的計算;ESP模塊是ESP聯合仿真系統的核心,它主要完成汽車穩定性判斷和主動橫擺控制等,本文采用基于橫擺角速度的模糊控制.控制原理見圖6.
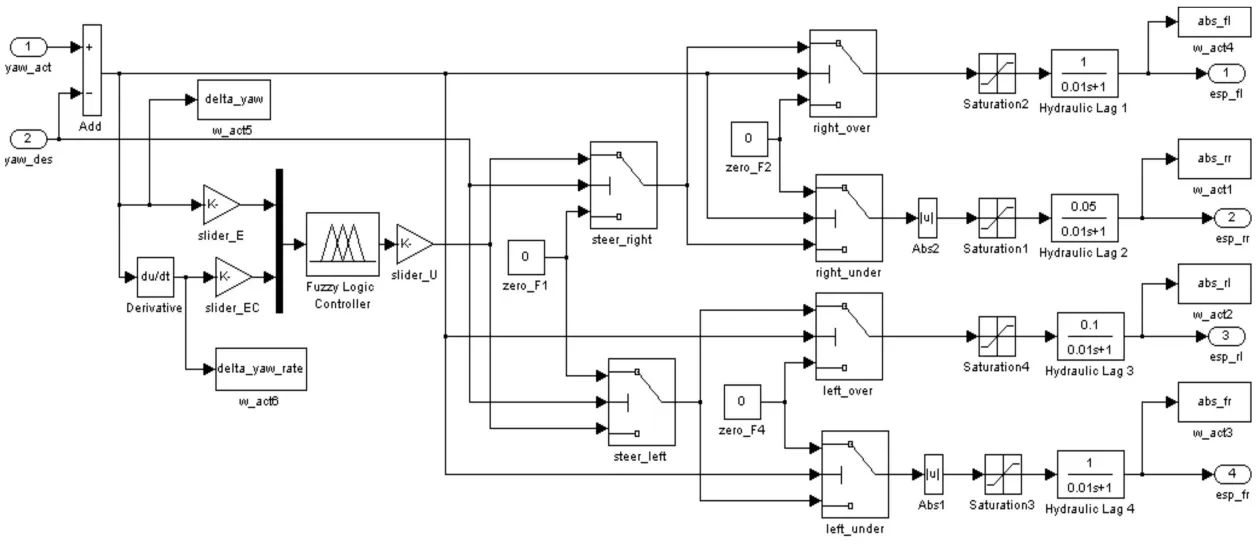
圖6 ESP控制原理圖
3 仿真控制效果
美國國家高速公路交通安全局NHTSA于2007年4月發布了FMVSS126,該法規對ESP的功能、試驗方法和評價指標作了規定.FMVSS 126標準規定的正弦延遲試驗轉向盤轉角如圖7所示,為0.7Hz頻率的正弦輸入,以13.5°/s的速度增加轉向盤轉角,初始轉角為δ=1.5A0.3g,入口初始速度為80km/h.每次振幅增加0.5A0.3g.轉向角最大值δ大于270°或者等于6.5倍的A0.3g時,停止試驗.完成正弦轉角試驗后,以車輛側向位移和橫擺角速度作為穩定性控制的評價.
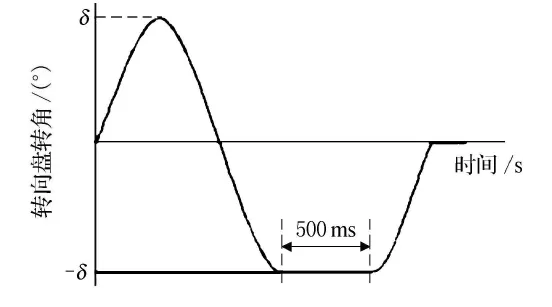
圖7 正弦延遲試驗
當轉向盤轉角達到或超過5A0.3g時,對于整車質量小于3 500kg的汽車,要求正弦轉角試驗開始后1.07s時的汽車質心側向位移大于1.83m;對于整車質量大于3 500kg的汽車,該位移應大于1.52m.
對橫擺角速度的評價參看圖8,圖中T0為正弦轉角結束時刻.對橫擺角速度要求如下
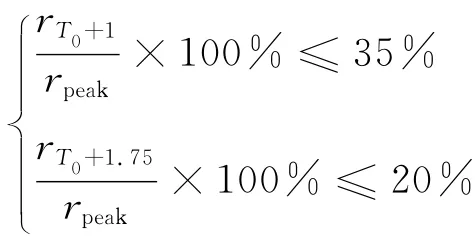
式中:rpeak為第二個正弦點的峰值橫擺角速度;rT0+1為 T0+1 時 刻 的 橫 擺 角 速 度;rT0+1.75為T0+1.75時刻的橫擺角速度.
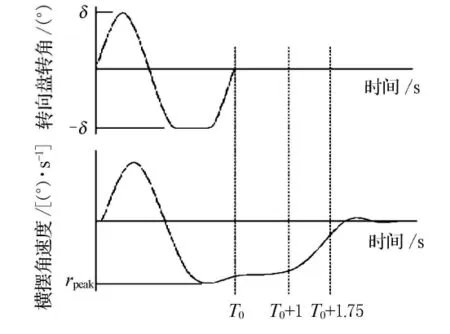
圖8 正弦轉角試驗評價
按照FMVSS 126標準規定的正弦延遲試驗方法,進行了高附路面下的模擬正弦延遲試驗仿真分析[7].圖9和圖10分別為該車在ESP關閉和開啟狀態下的正弦延遲試驗仿真分析結果.由圖9可見,轉向盤轉角幅值為80°和120°時,車輛橫擺角速度幅值隨著轉向盤轉角的變化而變化,當轉向盤轉角回到中間位置后,車輛的橫擺角速度經過了1s左右的小幅振蕩后也回到0值,說明車輛能夠回到穩定狀態,車輛處于能夠操縱狀態.而當轉向盤轉角幅值達到169°時,橫擺角速度經過振蕩后沒有回到0值,轉向盤回到中間位置后車輛的橫擺角速度仍然為35°/s,在3s時刻,車輛的橫擺角速度仍然保持35°/s.圖10為開啟了ESP系統后的正弦延遲試驗仿真結果.圖中可以看出,當轉向盤轉角幅值達到180°時,車輛的橫擺角速度在轉向盤回到中間位置后t=3s時刻經過振蕩歸零,車輛仍然能夠保持直線行駛,處于可操控狀態.當轉向盤轉角幅值達到279°時,車輛橫擺角速度振蕩幅值增加,但是在t=4s時刻仍然能夠歸零,車輛能夠繼續保持直線行駛狀態,按照FMVSS 126標準的穩定性評價,車輛仍然處于穩定行駛狀態.說明當車輛處于過度轉向的極限工況下,ESP系統能夠抑制車輛的過度轉向,進而使車輛在大的轉向盤轉角輸入下仍然能夠維持穩態行駛,提高了車輛的操縱穩定性.
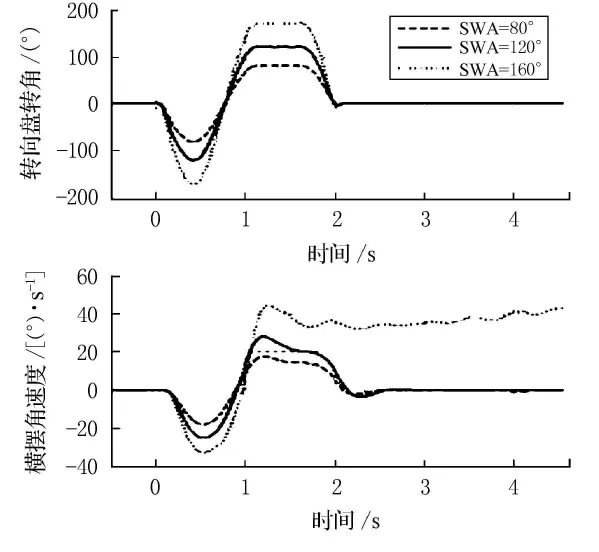
圖9 ESP關閉時橫擺角速度變化
4 結 論
1)利用ADAMS/Car軟件分別建立原型車各子系統模型,進而建立整車虛擬樣機模型,用于進行車輛ESP控制系統模擬仿真研究,試驗驗證模型精度高.
2)利用 Matlab/Simulink建立基于橫擺角速度的ESP模糊控制模型,能夠通過對車輪實施制動,進而有效地控制車輛穩定行駛,改善汽車的操縱穩定性.
3)按照FMVSS 126標準規定的正弦延遲試驗方法,進行高附路面下的模擬正弦延遲試驗仿真分析,結果表明當車輛處于過度轉向的極限工況下,ESP系統能夠抑制車輛的過度轉向,進而使車輛轉向盤轉角達到279°時,仍然能夠維持穩態行駛.
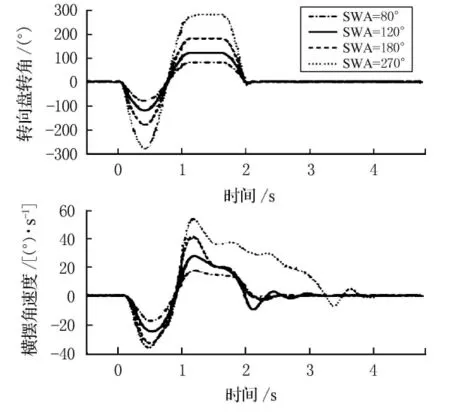
圖10 ESP開啟后橫擺角速度變化
[1]李向瑜,高振海,郭 健,等.汽車裝備電子穩定性程序后的性能評價方法[J].拖拉機與農用運輸車,2008,35(4):1-4.
[2]ANTON T,van Zanten.Bosch ESP systems:5years of experience[J].SAE,2000(1):1633-1638.
[3]余志生.汽車理論[M].北京:機械工業出版社,2000.
[4]U.S.Department of Transportation,National Highway Traffic Safety Administration.Laboratory test procedure for FMVSS 126,Electronic Stability Control Systems,TP-126-01[Z].U.S.Department of Transportation,April 10,2008.
[5]范小彬,夏群生.基于虛擬樣機的汽車穩定性主動橫擺模糊控制[J].拖拉機與農用運輸車,2010,37(1):47-49.
[6]王德平,郭孔輝,宗長富.車輛動力學穩定性控制的理論研究[J].汽車工程,2000,22(1):729-732.
[7]劉春輝,王增才.車輛電子穩定性程序的最優控制[J].武漢理工大學學報:交通科學與工程版,2010,34(1):64-67.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37