基于Matlab/Simulink的空空導彈攻擊區(qū)仿真*
2011-12-07 08:05:12曲曉燕
彈箭與制導學報 2011年5期
曲曉燕,張 林,范 庚
(1海軍航空工程學院,山東煙臺 264001;2空軍駐西北地區(qū)軍事代表室,西安 710043)
0 引言
空空導彈攻擊區(qū)是空空導彈作戰(zhàn)效能的綜合體現(xiàn),是分析導彈性能、指導作戰(zhàn)運用的重要技術依據(jù)[1-2]。由于導彈的價格昂貴以及攻擊條件的復雜多樣,用大量靶場試驗的方法得出各種攻擊條件下的攻擊區(qū)是不現(xiàn)實的。通過建立數(shù)學模型,利用計算機仿真計算導彈的攻擊區(qū),可以在理論上得出攻擊區(qū)的范圍和變化規(guī)律,從而為進一步發(fā)揮導彈的作戰(zhàn)效能和火控系統(tǒng)軟件設計提供參考數(shù)據(jù)[3]。
空空導彈攻擊區(qū)的計算多采用工程計算語言編寫,例如C、C++等。但這些語言存在仿真過程可視化效果差、編程復雜、計算時間長等不足。針對這些問題,文中提出了一種簡便有效的仿真計算方法:在Matlab 6.5環(huán)境下,利用Simulink建立了彈道仿真模型,并通過建立腳本文件,運用Matlab編程調(diào)用該模型,對空空導彈攻擊區(qū)進行了仿真計算。
1 坐標系選取及其轉(zhuǎn)換
1.1 慣性坐標系
慣性坐標系是一個固定坐標系,坐標系原點OI取在導彈發(fā)射原點;YI軸取初始目標線,方向由導彈指向目標;ZI軸取垂直YI軸向下;XI軸垂直YI軸和ZI軸,方向符合右手定則。
1.2 彈體坐標系
彈體坐標系與導彈固聯(lián)在一起,坐標原點取導彈重心OM;X軸取導彈縱軸,方向指向?qū)楊^部;Y軸取導彈的俯仰軸,方向垂直X軸向下;Z軸垂直X軸和Y軸,方向符合右手定則。
1.3 坐標系轉(zhuǎn)換
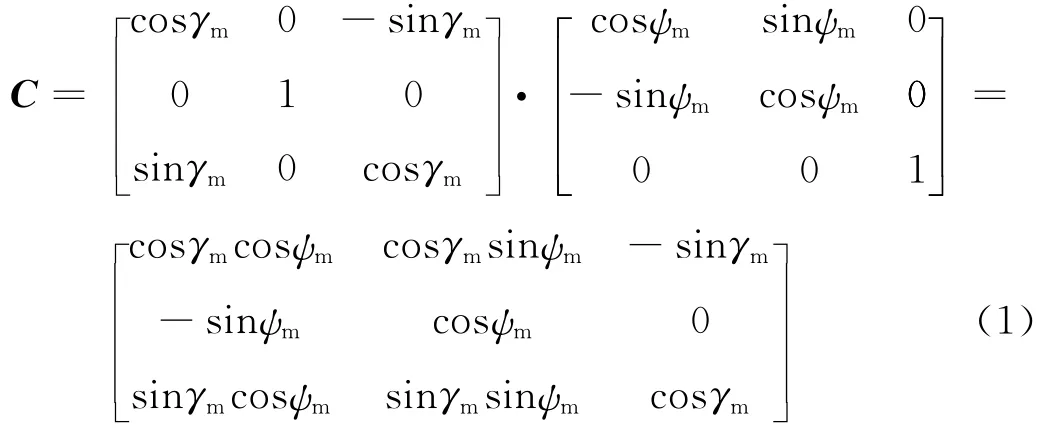
不考慮橫滾角的影響,慣性坐標系到彈體坐標系可先繞ZI軸轉(zhuǎn)過偏航角ψm,再繞YI軸轉(zhuǎn)過俯仰角γm求得。轉(zhuǎn)換陣表示為[4]:
2 彈道仿真模塊化設計
文中采用Simulink工具箱建立彈道仿真模型。根據(jù)各部分的任務及功能,將系統(tǒng)分為4個模塊:目標運動模塊、導彈運動模塊、相對運動模塊、導彈制導與控制模塊和命中條件限制模塊,各模塊的輸入輸出信號如圖1所示。
在Simulink提供的圖形用戶界面GUI上,只要進行鼠標的簡單拖拉操作就可構(gòu)造出復雜的仿真模型。Simulink的分層結(jié)構(gòu),從建模角度講,既適于自上而下(top-down)的設計流程(概念、功能、系統(tǒng)、子系統(tǒng)、直至器件),又適于自下而上(bottom-up)逆程設計;從分析研究角度講,這種Simulink模型不僅能讓用戶知道具體環(huán)節(jié)的動態(tài)細節(jié),而且能讓用戶清晰的了解各器件、各子系統(tǒng)、各系統(tǒng)間的信息交換,掌握各部分之間的交互影響[5]。
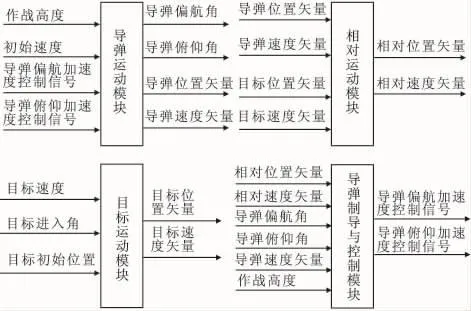
圖1 模塊輸入輸出信號圖
2.1 目標運動模塊
假定目標和導彈的初始位置在同一水平面上,導彈在慣性坐標系的原點,目標坐標為(0,Yt0,0),目標初始速度和YI軸的夾角為ηt0,即目標進入角。兩者的初始相對位置如圖2所示。
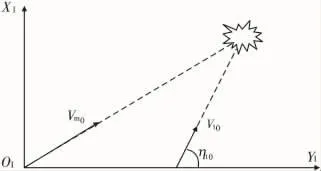
圖2 導彈 -目標初始相對位置示意圖
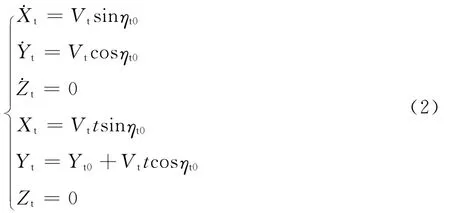
慣性坐標系下的目標勻速直線運動方程如式(2)所示。
利用Simulink的不同功能塊設計目標勻速直線運動運動模塊如圖3所示。
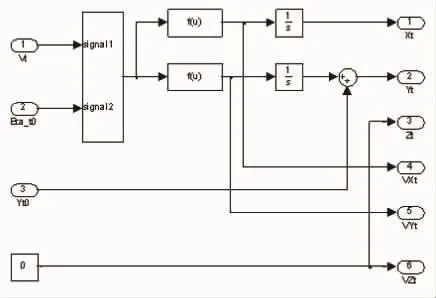
圖3 目標勻速直線運動模塊Simulink實現(xiàn)框圖
2.2 導彈運動模塊
由于三自由度模擬非常接近六自由度模擬計算結(jié)果,且計算速度遠高于六自由度模擬,因此通常采用三自由度模擬計算結(jié)果作為理論攻擊區(qū)[6]。文中導彈數(shù)學模型采用三自由度模型,但考慮了導彈控制系統(tǒng)的時間延遲。導彈數(shù)學模型如圖4所示。導彈運動模塊設計如圖5所示。
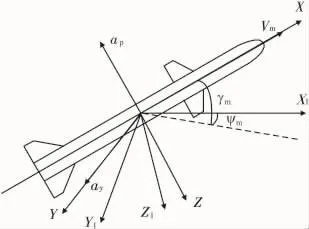
圖4 導彈數(shù)學模型
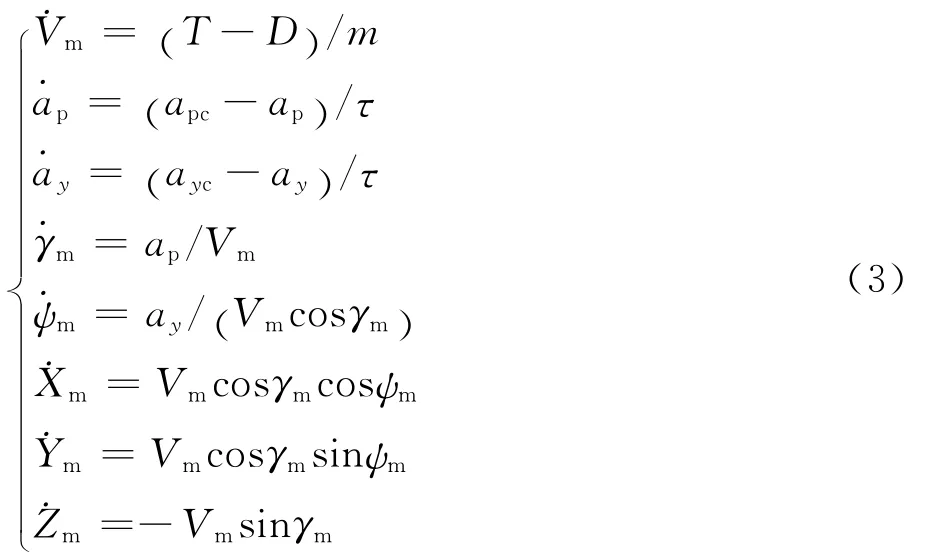
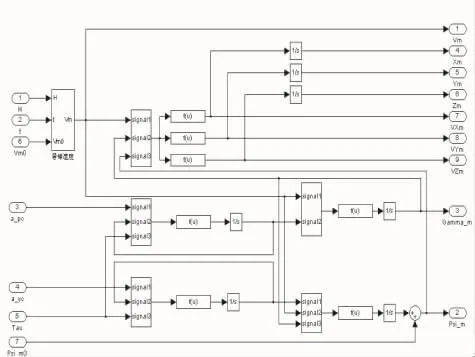
圖5 導彈運動模塊Simulink實現(xiàn)框圖
2.3 相對運動模塊
設(Xt,Yt,Zt)、(Xm,Ym,Zm)分別是目標和導彈在慣性坐標系下任意時刻的坐標,則導彈與目標相對運動方程如式(4)。相對運動模塊設計如圖6所示。
圖6 相對運動模塊Simulink實現(xiàn)框圖
2.4 導彈制導與控制模塊
假設導彈采用廣義的比例導引律,導彈俯仰和偏航兩方向上的控制方程如下[4]:

導彈制導與控制模塊設計如圖7所示。
圖7 導彈制導與控制模塊Simulink實現(xiàn)框圖
2.5 命中條件限制模塊
導彈能否命中目標受到很多因素的限制[7]。文中主要考慮以下參數(shù)限制:
1)導彈飛行時間小于導彈工作時間(t<Tmax);
2)彈目相對速度大于最小限制值(Vc>Vc,min);
3)導彈飛行時間大于導彈安全飛行時間(t>Tsafe);
4)脫靶量小于或者等于導彈殺傷半徑(R≤Rmax)。
命中條件限制模塊設計如圖8所示。
3 攻擊區(qū)仿真程序?qū)崿F(xiàn)
在設計攻擊區(qū)仿真程序時,首先建立腳本文件,利用Matlab語言編程設置仿真參數(shù)、改變目標進入角,并采用二分法計算初始目標距離;解算彈道時,在腳本文件中調(diào)用Simulink建立的彈道模型。仿真程序流程及相應程序如圖9所示(圖中程序部分以計算導彈最大發(fā)射距離為例)。
圖8 命中條件限制模塊Simulink實現(xiàn)框圖
圖9 仿真程序流程及相應程序
4 仿真結(jié)果
利用上述程序在計算機上進行了仿真計算。以下給出了不同作戰(zhàn)條件和不同目標機動方式下的導彈攻擊區(qū)。
初始條件:作戰(zhàn)高度H=5000m,載機速度Vm=300m/s,目標速度Vt=300m/s,目標作勻速直線運動。仿真結(jié)果如圖10所示。
初始條件:作戰(zhàn)高度H=10000m,載機速度Vm=200m/s,目標速度Vt=300m/s,目標作勻速直線運動。仿真結(jié)果如圖11所示。
5 結(jié)束語
文中針對空空導彈攻擊區(qū)計算過程的特點,采用Simulink方塊圖與Matlab語言編程相結(jié)合的方法對
圖10 仿真結(jié)果
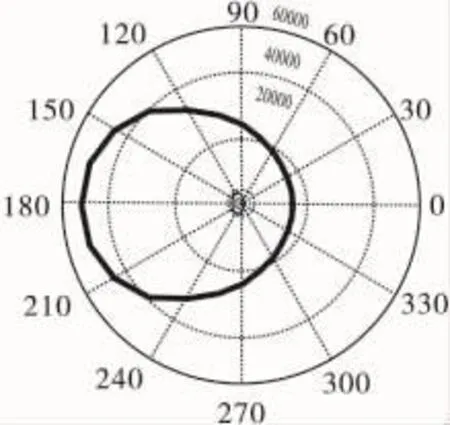
圖11 仿真結(jié)果
攻擊區(qū)進行了仿真,為空空導彈攻擊區(qū)的仿真計算提供了一種簡便有效的方法。該方法具有以下特點:
a)可視化效果好。Matlab包含豐富的繪圖函數(shù),而且采用Simulink建立彈道仿真模型,能夠?qū)Χ鄠€輸出進行同時監(jiān)控,因而用戶可以方便的查看整個仿真過程。
b)建模復雜度低。Simulink工具箱包含強大的功能模塊,用戶只需根據(jù)信號的輸入輸出關系連接各功能塊,即可建立復雜的仿真模型,與傳統(tǒng)語言相比,大大降低了編程復雜度。
c)程序擴展性好。針對不同的空空導彈、作戰(zhàn)條件及目標機動方式,在計算導彈攻擊區(qū)時,只需要改變Simulink彈道仿真模型中各模塊的相應參數(shù)。
該仿真算法已成功應用于某型空空導彈作戰(zhàn)仿真系統(tǒng)研制,應用效果良好。
[1]胡朝暉,李東文,汪浩生.通用空空導彈攻擊區(qū)仿真研究[J].彈箭與制導學報,2002,22(3):18-23.
[2]逮宏亮,張藝瀚,李偉仁.基于RBF網(wǎng)絡的導彈攻擊區(qū)解算及對比分析[J].火力與指揮控制,2004,29(5):47-50.
[3]崔曉寶,田秀麗,杜祥楚.格斗導彈攻擊區(qū)分析數(shù)字仿真系統(tǒng)[J].航空兵器,1997(1):13-17.
[4]馮戈利.機載中程空空導彈作戰(zhàn)效能分析[D].西安:西北工業(yè)大學,2001.
[5]張志涌.精通 Matlab6.5版[M].北京:北京航空航天大學出版社,2003.
[6]劉代軍,高曉光,李言俊,等.中遠程復合制導空空導彈允許攻擊區(qū)計算[J].航空兵器,1998(2):1-5.
[7]李廷杰.導彈武器系統(tǒng)的效能及其分析[M].北京:國防工業(yè)出版社,2000.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
