基于蟻群優(yōu)化的超聲波電動機(jī)系統(tǒng)動態(tài)模糊辨識建模
2011-11-20 08:34:56史敬灼
微特電機(jī) 2011年10期
呂 琳,史敬灼
(河南科技大學(xué),河南洛陽471003)
0 引 言
建立超聲波電動機(jī)系統(tǒng)模型可采用不同方法,從適合于控制應(yīng)用的角度出發(fā),控制建模方法研究日益受到重視。通常,為便于在線實現(xiàn)并盡量減小在線計算量,控制模型應(yīng)相對簡單并能夠表征超聲波電動機(jī)系統(tǒng)控制非線性的主要方面。由于理論建模的局限性,控制建模通常以基于實驗數(shù)據(jù)的辨識方法為主[1-2]。根據(jù)模型辨識方法的不同,模型的形式可以是傳遞函數(shù)、差分方程、神經(jīng)網(wǎng)絡(luò)等。
近年來,基于模糊邏輯理論的模糊建模方法逐漸興起,為非線性復(fù)雜系統(tǒng)建模提供了另一有效途徑。模糊建模方法在電機(jī)領(lǐng)域的應(yīng)用還不多,更多的是采用模糊方法實現(xiàn)轉(zhuǎn)速或位置控制。
本文研究超聲波電動機(jī)系統(tǒng)動態(tài)模型的模糊建模方法。論述了超聲波電動機(jī)系統(tǒng)的模糊建模方法與過程,給出了采用蟻群優(yōu)化確定模糊聚類隸屬函數(shù)的方法,并用最小二乘法辨識模糊規(guī)則結(jié)論部分的待定參數(shù),建立了能夠表征超聲波電動機(jī)驅(qū)動電壓幅值、頻率與其轉(zhuǎn)速之間非線性動態(tài)關(guān)系的二輸入單輸出Takagi-Sugeno(以下簡稱T-S)模糊模型。
1 建模所需數(shù)據(jù)的實驗測取
實驗系統(tǒng)框圖如圖1所示。實驗用電機(jī)為Shinsei USR60型兩相行波超聲波電動機(jī),H橋相移PWM驅(qū)動電路。控制部分采用DSP為主控芯片,用于實現(xiàn)控制算法,包含分別用于控制兩相驅(qū)動電壓幅值的A、B相電壓閉環(huán)控制器,以及通過調(diào)節(jié)驅(qū)動頻率實現(xiàn)轉(zhuǎn)速控制的轉(zhuǎn)速閉環(huán)控制器。圖中,Nref、Uref分別為轉(zhuǎn)速、驅(qū)動電壓幅值的給定值。設(shè)定Nref測取轉(zhuǎn)速階躍響應(yīng),其間調(diào)節(jié)Uref以改變電機(jī)驅(qū)動電壓的幅值大小;隨著驅(qū)動電壓幅值的變化,在轉(zhuǎn)速閉環(huán)控制作用下,頻率必然改變以維持電機(jī)轉(zhuǎn)速為Nref;同時記錄Uref、頻率及轉(zhuǎn)速的動態(tài)變化過程,得到一組數(shù)據(jù)。改變Uref調(diào)節(jié)方式、Nref數(shù)值,重復(fù)上述過程,測得多組數(shù)據(jù)用于建模。

圖1 轉(zhuǎn)速控制實驗系統(tǒng)結(jié)構(gòu)
2 超聲波電動機(jī)系統(tǒng)模糊建模方法
一般地,T-S模糊模型的基本結(jié)構(gòu)如圖2所示,包含輸入量化、模糊化(隸屬度計算)、基于模糊規(guī)則的模糊推理和輸出比例運算等基本環(huán)節(jié)。其模糊規(guī)則形式如下,前提條件是模糊的,結(jié)論是清晰值。

圖2 模糊模型基本結(jié)構(gòu)
Ri:If(x1isAi1)and(x2isAi2)and…and(xrisAir),theny=ai0+ai1x1+ai2x2+…+airxr
規(guī)則中,Ri代表第i條模糊規(guī)則。xk是模糊模型的第k個輸入變量,Ajk是變量xk的第j個模糊子集,yi是第i條規(guī)則Ri的輸出,aij是結(jié)論部分待定參數(shù)。
建立超聲波電動機(jī)系統(tǒng)的T-S模型,需要根據(jù)實測輸入、輸出數(shù)據(jù)進(jìn)行結(jié)構(gòu)辨識和參數(shù)辨識。參數(shù)辨識指規(guī)則前提部分和結(jié)論部分的參數(shù)辨識。參數(shù)辨識是在一定的模糊推理結(jié)構(gòu)約束下,確定最優(yōu)的模型參數(shù),以使模型輸出盡量接近實測數(shù)據(jù)的優(yōu)化過程。結(jié)構(gòu)辨識是參數(shù)辨識的基礎(chǔ)。首先要確定輸入變量及輸入論域空間;然后,可采用模糊網(wǎng)格、模糊聚類、模糊樹等算法進(jìn)行輸入空間的模糊劃分。其中,模糊聚類算法最為常用,它用隸屬度描述向量屬于一個聚類的可能性。首先,設(shè)定一個聚類數(shù),該聚類數(shù)既是隸屬函數(shù)個數(shù)也是規(guī)則數(shù);然后對輸入空間進(jìn)行模糊劃分,采用蟻群算法確定高斯型隸屬函數(shù)的中心、寬度等特征值,即可完成超聲波電動機(jī)系統(tǒng)T-S模型的結(jié)構(gòu)辨識。T-S模型結(jié)論部分的待定參數(shù)可用最小二乘法辨識得到。模型建立后,進(jìn)行驗證計算,如果模型輸出值誤差較大,則增加規(guī)則數(shù)重新進(jìn)行建模。建模基本步驟如下:
(1)確定輸入變量及個數(shù)p、聚類數(shù)c;
(2)根據(jù)實測的建模數(shù)據(jù),確定驅(qū)動電壓幅值、頻率和轉(zhuǎn)速對應(yīng)的論域區(qū)間[M-,M+];
(4)計算各數(shù)據(jù)點xk與聚類中心的距離dik:

(5)計算建模數(shù)據(jù)的隸屬度μik:
式中:m為常數(shù),通常取m=2。
(6)采用最小二乘法求得T-S模型結(jié)論部分的待定參數(shù)aij;
(7)進(jìn)行模型驗證。若模型精度不理想,則改變輸入變量個數(shù)p和/或聚類數(shù)c,轉(zhuǎn)步驟(2)。
根據(jù)實測數(shù)據(jù)分析,確定模型輸入變量為當(dāng)前及以前時刻的驅(qū)動電壓幅值(峰峰值)u(k-3)、u(k-2)、u(k-1)、u(k),頻率值f(k-3)、f(k-2)、f(k-1)、f(k)和轉(zhuǎn)速值n(k-2)、n(k-1);輸出變量為當(dāng)前時刻的轉(zhuǎn)速值n(k)。輸入變量個數(shù)p=10,規(guī)則數(shù)(亦即聚類數(shù))c=10。u(k-3)、u(k-2)、u(k-1)、u(k)的隸屬函數(shù)是一樣的,各有10個高斯型隸屬函數(shù),f(k-3)、f(k-2)、f(k-1)、f(k)和n(k-2)、n(k-1)也各有10個隸屬函數(shù),共30個隸屬函數(shù)。每個隸屬函數(shù)有寬度和中心等2個待定參數(shù),所以共有60個待定參數(shù)需要通過蟻群算法優(yōu)化獲得。
3 用于超聲波電動機(jī)模糊建模的蟻群算法
所建動態(tài)模糊模型中,高斯型隸屬函數(shù)的中心和寬度等參數(shù)共有60個。期望通過基于實測數(shù)據(jù)的動態(tài)優(yōu)化過程,獲取如此多的優(yōu)化參數(shù)值,需要慎重選擇適當(dāng)?shù)膬?yōu)化算法以得到確實有效的優(yōu)化結(jié)果。另一方面,超聲波電動機(jī)本身的顯著非線性,必然使得作為優(yōu)化目標(biāo)的模糊模型具有較高的復(fù)雜性;這進(jìn)一步增加了優(yōu)化過程的復(fù)雜度。
蟻群算法是一類內(nèi)含隨機(jī)性的群體智能優(yōu)化算法。因其在解決復(fù)雜優(yōu)化問題方面表現(xiàn)出的良好性能,蟻群算法的應(yīng)用領(lǐng)域正在不斷拓展[3-4]。假定有q個待優(yōu)化的參數(shù),分別為a1,a2,…,aq。首先,對每一個參數(shù)ai(1≤i≤q)將其設(shè)置為可能取值范圍內(nèi)的Q個非零隨機(jī)數(shù),形成集合Wai。蟻群從蟻巢出發(fā)去尋找食物,每只螞蟻都從集合Wa1出發(fā),根據(jù)集合中的每個元素的信息素選擇一個值,在全部集合中選擇一組值,當(dāng)螞蟻在所有集合中完成元素選擇后,它就到達(dá)食物源并按原路返回蟻巢,同時調(diào)節(jié)集合中元素的信息素。反復(fù)進(jìn)行這一過程,當(dāng)達(dá)到給定的迭代次數(shù)或者性能指標(biāo)時,尋優(yōu)過程結(jié)束。
采用蟻群算法優(yōu)化超聲波電動機(jī)T-S動態(tài)模糊模型中的隸屬函數(shù)參數(shù),計算步驟如下。
(1)分別在u、f和n的取值范圍內(nèi)隨機(jī)產(chǎn)生100個非零數(shù),組成60×100矩陣;
(2)初始化參數(shù)。設(shè)定螞蟻個數(shù)m,信息素的殘留程度ρ(0≤ρ<1),信息素總量Q,最大循環(huán)次數(shù)Nm,令每個集合中每個元素的信息素τj(Wai)=C(C為常數(shù)),Δτj(Wai)=0,j=1,2,…,100。τj(Wai)表示集合Wai的第j個元素的信息素,Δτj(Wai)=0表示在本次循環(huán)中集合Wai上的第j個元素上的信息素的增量;
(3)第k只螞蟻從集合Wa1出發(fā)(k=1,2,…,m),根據(jù)移動概率獨立隨機(jī)的從集合Wai中選擇第j個元素。移動概率計算如下:
當(dāng)?shù)趉只螞蟻在所有集合里完成元素的選擇后,就到達(dá)食物源。
(4)重復(fù)步驟(3)。m只螞蟻在所有集合里完成元素的選擇后,按照每只螞蟻選擇的元素,即超聲波電動機(jī)T-S動態(tài)模糊模型中的隸屬函數(shù)參數(shù),根據(jù)輸入數(shù)據(jù)計算模型輸出,與實測數(shù)據(jù)比較得到誤差,進(jìn)而得到每只螞蟻的性能指標(biāo)如下:

式中:Y為模型輸出;O為實驗數(shù)據(jù);d=1,2,…,h,h為實測數(shù)據(jù)點個數(shù)。記錄本次循環(huán)中性能指標(biāo)的最小值,并記錄該值對應(yīng)的螞蟻所選擇的元素;
(5)更新信息素
式中:Δτkj(Wai)表示第k只螞蟻在本次循環(huán)中留在集合Wai上的第j個元素上的信息素;τj(next)(Wai)為更新的信息素,用于下一次循環(huán)中;ek是第k只螞蟻的最大輸出誤差:

(6)當(dāng)所有螞蟻都完成元素的選擇,更新信息素后,完成一次循環(huán)。重復(fù)步驟(3)~(5),直到指定最大循環(huán)次數(shù)Nm或者達(dá)到指定的性能指標(biāo)值Je,循環(huán)結(jié)束,并輸出最優(yōu)解。
4 蟻群優(yōu)化模糊建模
蟻群優(yōu)化算法中,螞蟻個數(shù)m、信息素殘留程度ρ等參數(shù)對優(yōu)化過程具有重要影響,甚至?xí)绊憙?yōu)化算法的有效性。但是這些參數(shù)的取值與優(yōu)化對象密切相關(guān),至今沒有明確的方法;通常需要針對特定的優(yōu)化對象,通過嘗試逐步尋求適當(dāng)?shù)膍、ρ等參數(shù)取值,以加快優(yōu)化進(jìn)程、改善優(yōu)化結(jié)果。
4.1 螞蟻個數(shù)m的確定
設(shè)定ρ=0.7,取信息素總量Q=100,m分別取為40、50、60和80,通過比較優(yōu)化過程及優(yōu)化結(jié)果,尋找合適的m值。優(yōu)化過程退出條件設(shè)定為固定循環(huán)次數(shù),即當(dāng)優(yōu)化循環(huán)次數(shù)達(dá)到預(yù)先設(shè)定的最大循環(huán)次數(shù)Nm時,輸出最優(yōu)解,優(yōu)化過程結(jié)束。此處,取Nm=150。考慮到蟻群優(yōu)化過程中包含隨機(jī)因素,對每個m值各進(jìn)行三次優(yōu)化計算,每次得到一個最優(yōu)解及對應(yīng)的最小性能指標(biāo)Jmin,同時記錄優(yōu)化過程所用時間。對三次優(yōu)化計算所得最小性能指標(biāo)Jmin取平均值,可作為衡量優(yōu)化效果好壞的依據(jù)。

表1 不同m值的優(yōu)化過程對比
表1給出了上述優(yōu)化計算的結(jié)果。計算所用計算機(jī)的CPU為Pentium 4,主頻2.93 GHz,內(nèi)存容量為512 MB。可以看出,隨著螞蟻數(shù)的增加,計算時間變長;m=50和m=80情況下的Jmin平均值較小。下面改變優(yōu)化過程退出條件,比較m=50和m=80的優(yōu)化效果,確定優(yōu)化效果較好的螞蟻數(shù)。
表1中,Jmin值通常大于800;因而設(shè)定退出條件為Jmin≤800或Nm>1000。其中,最大循環(huán)次數(shù)Nm設(shè)定為1 000,以限制優(yōu)化過程時間長度。改變退出條件后,分別在m=50和80的情況下,進(jìn)行三次優(yōu)化運算,得到結(jié)果如表2所示。可以看出,m=80時,三次優(yōu)化計算所得最小性能指標(biāo)Jmin均達(dá)到800以下,且計算所用時間明顯少于m=50情況。至此可以確定,螞蟻個數(shù)m取為80較為合適。

表2 m=50和m=80情況下的優(yōu)化過程對比
4.2 信息素殘留程度ρ的確定
設(shè)定m=80,信息素總量Q=100,最大循環(huán)次數(shù)Nm=200,ρ分別取為0.3﹑0.5﹑0.7和0.9,分別進(jìn)行三次優(yōu)化計算,得到結(jié)果如表3所示。
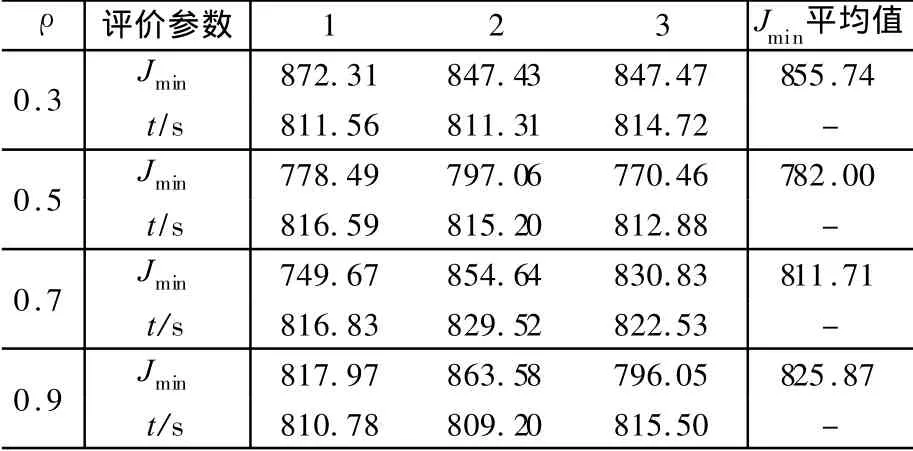
表3 不同ρ值的優(yōu)化過程對比
表3表明,由于循環(huán)次數(shù)及m值固定,每次優(yōu)化過程的計算時間基本相同。在ρ=0.5時,Jmin平均值最小,表明優(yōu)化效果較好。由此可以確定,在循環(huán)次數(shù)Nm=200的情況下,取ρ=0.5,可以得到較好的優(yōu)化效果。可以考慮增大循環(huán)次數(shù),看是否能得到一個更小的性能指標(biāo),使優(yōu)化效果更細(xì)想。
下面,在m=80、ρ=0.5的情況下,改變退出條件,期望得到更好的優(yōu)化結(jié)果。根據(jù)表3的Jmin值情況,將退出條件中的性能指標(biāo)設(shè)定為Jmin≤700。為了避免出現(xiàn)計算時間過長的情況,將最大循環(huán)次數(shù)設(shè)為2 000。故退出條件為Jmin≤700或Nm>2 000。經(jīng)過優(yōu)化計算,得到最優(yōu)解,對應(yīng)的Jmin值為662.1,計算過程歷時935.55 s。
根據(jù)上述最優(yōu)解,得到超聲波電動機(jī)動態(tài)T-S模糊模型中輸入變量u、f和n的高斯型隸屬函數(shù)參數(shù)。模型計算輸出與實驗數(shù)據(jù)對比如圖3、圖4所示。圖3、圖4中,模型輸出的最大相對誤差值分別為1.4%、1.2%,平均誤差為0.68 r/min、0.65 r/min,較好地反映了超聲波電動機(jī)的動態(tài)特性。
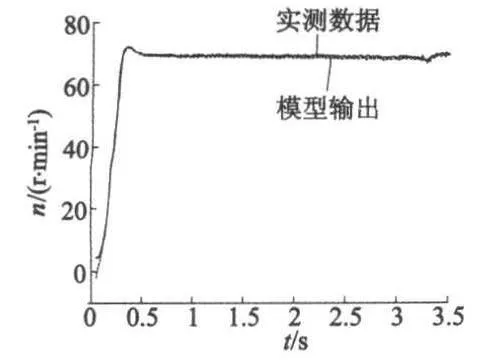
圖3 模型輸出與實測數(shù)據(jù)對比(nref=70 r/min)
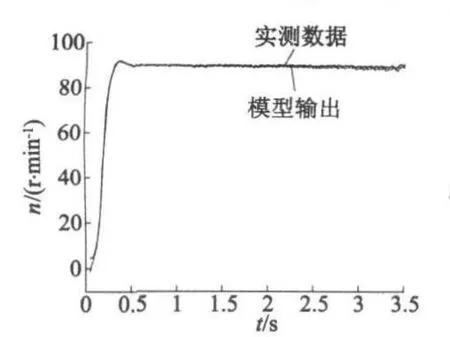
圖4 模型輸出與實測數(shù)據(jù)對比(nref=90 r/min)
5 結(jié) 語
蟻群算法可以有效避免局部優(yōu)化,尋優(yōu)方法簡單高效,魯棒性強(qiáng)。本文利用蟻群算法對超聲波電動機(jī)系統(tǒng)T-S動態(tài)模糊模型參數(shù)進(jìn)行優(yōu)化,得到了較為滿意的效果。
[1] Tomonobu S,Mitsuru N,Naomitsu U,et al.Mathematical model of ultrasonic motors for speed control[J].Electric Power Components and Systems,2008,36(6):637-648.
[2] Chen T C,Yu C H.Generalized regression neural-networkbased modeling approach for traveling-wave ultrasonic motors[J].Electric Power Components and Systems,2009,37(6):645-657.
[3] 王旭東,劉金鳳,張雷.蟻群神經(jīng)網(wǎng)絡(luò)算法在電動車用直流電機(jī)起動過程中的應(yīng)用[J].中國電機(jī)工程學(xué)報,2010,30(24):95-100.
[4] 王志強(qiáng),劉剛.高速無刷直流電機(jī)鎖相轉(zhuǎn)速控制器參數(shù)蟻群優(yōu)化[J].微電機(jī),2010,43(6):54-58.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03