對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的矢量控制
2011-11-20 08:34:56徐海珠謝順依張林森連軍強(qiáng)
微特電機(jī) 2011年10期
徐海珠,謝順依,張林森,連軍強(qiáng)
(海軍工程大學(xué),湖北武漢430033)
0 引 言
水下航行器航行過程中需要穩(wěn)定姿態(tài),因此大多采用對(duì)轉(zhuǎn)螺旋槳推進(jìn)系統(tǒng)以克服陀螺效應(yīng)[1]。對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)[2]因?yàn)闆]有電刷、換向器和齒輪,有兩個(gè)機(jī)械輸出端口[3],可直接驅(qū)動(dòng)對(duì)轉(zhuǎn)螺旋槳推進(jìn)系統(tǒng),比功率大、可靠性高;轉(zhuǎn)矩脈動(dòng)小、散熱效果好;徑向拉力和軸向拉力小、無陀螺效應(yīng)等優(yōu)良性能,因此在艦船、魚雷、水下自主航行器等水下電力推進(jìn)領(lǐng)域廣泛應(yīng)用[4-5]。
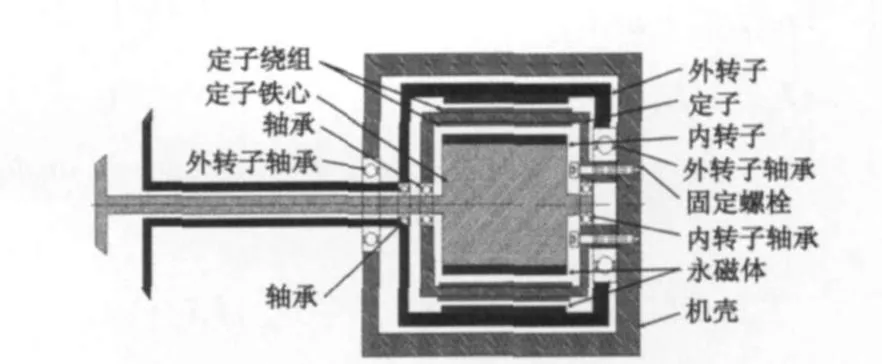
圖1 對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的結(jié)構(gòu)
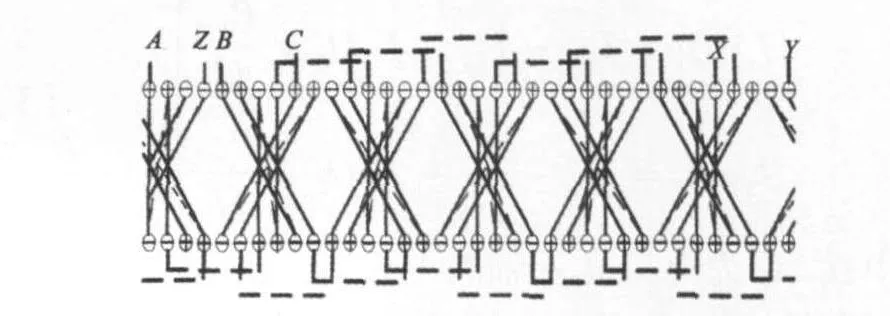
圖2 對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的繞組端部
1 結(jié)構(gòu)和工作原理
對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)由一個(gè)定子和兩個(gè)永磁轉(zhuǎn)子組成,外轉(zhuǎn)子的內(nèi)表面和內(nèi)轉(zhuǎn)子的外表面都安裝稀土永磁體,如圖1所示。
定子內(nèi)外兩側(cè)統(tǒng)一開槽,由一套繞組按照螺線管方式繞成,繞組端部大大縮短,效率大幅提高。定子內(nèi)外氣隙都得到利用,功率密度大為提高。
電樞內(nèi)外兩層繞組的相序相反[6](定子兩側(cè)A相位置不變,B相和C相繞組位置交換),如圖2所示,在兩層氣隙中分別產(chǎn)生等速而異向旋轉(zhuǎn)的磁場(chǎng)。因此通入一組對(duì)稱三相交流電,即可在兩個(gè)轉(zhuǎn)子上產(chǎn)生等大而反向的電磁轉(zhuǎn)矩,兩轉(zhuǎn)子通過單端同心雙軸輸出機(jī)械功率。
在兩個(gè)轉(zhuǎn)子上分別安裝一套霍爾傳感器磁鋼,在定子內(nèi)外兩側(cè)分別安裝霍爾器件,可以分別得到兩個(gè)轉(zhuǎn)子的位置信息,因?yàn)槎ㄗ屿o止,不需饋電環(huán)。
文獻(xiàn)[2]將對(duì)轉(zhuǎn)永磁同步電機(jī)分解為內(nèi)電機(jī)和外電機(jī)(定子內(nèi)側(cè)繞組和內(nèi)轉(zhuǎn)子構(gòu)成內(nèi)電機(jī),定子外側(cè)繞組和外轉(zhuǎn)子構(gòu)成外電機(jī)),討論了其工作原理和電磁模型[2];文獻(xiàn)[7]研究了雙轉(zhuǎn)子電機(jī)的設(shè)計(jì)方法[7]。但已有文獻(xiàn)中對(duì)該種電機(jī)控制策略的研究很少,特別是當(dāng)推進(jìn)器受到擾動(dòng)時(shí),兩轉(zhuǎn)子轉(zhuǎn)速發(fā)生差異,航行器易發(fā)生陀螺效應(yīng),限制了其在精密航行器上的應(yīng)用。因此,快速消除電機(jī)的陀螺效應(yīng),維持電機(jī)的等速對(duì)轉(zhuǎn)特性,是對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)急需解決的難題。
本文借鑒傳統(tǒng)PMSM的矢量控制方案,對(duì)內(nèi)外轉(zhuǎn)子的轉(zhuǎn)速分別進(jìn)行PI控制,并采取雙轉(zhuǎn)子轉(zhuǎn)速跟隨方案,建立了對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的矢量控制系統(tǒng),可有效解決上述問題。
2 矢量控制原理
2.1 數(shù)學(xué)模型
將電動(dòng)機(jī)分解為內(nèi)電動(dòng)機(jī)和外電動(dòng)機(jī),在d1-q1和d2-q2坐標(biāo)系下,分別建立兩個(gè)電機(jī)的狀態(tài)方程,然后在d、q坐標(biāo)系下合成。雖然兩電動(dòng)機(jī)轉(zhuǎn)速方向相反,但兩轉(zhuǎn)子旋轉(zhuǎn)方向分別和其電樞磁場(chǎng)方向相同,而兩個(gè)電樞是由同一組電流供電,因此在矢量圖上,兩電機(jī)的轉(zhuǎn)速方向相同,即電流方向[8]。
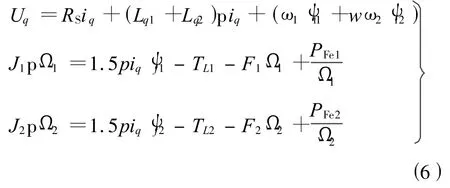
根據(jù)對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的工作原理,建立電機(jī)的電壓方程、轉(zhuǎn)矩方程和運(yùn)動(dòng)方程,如下:
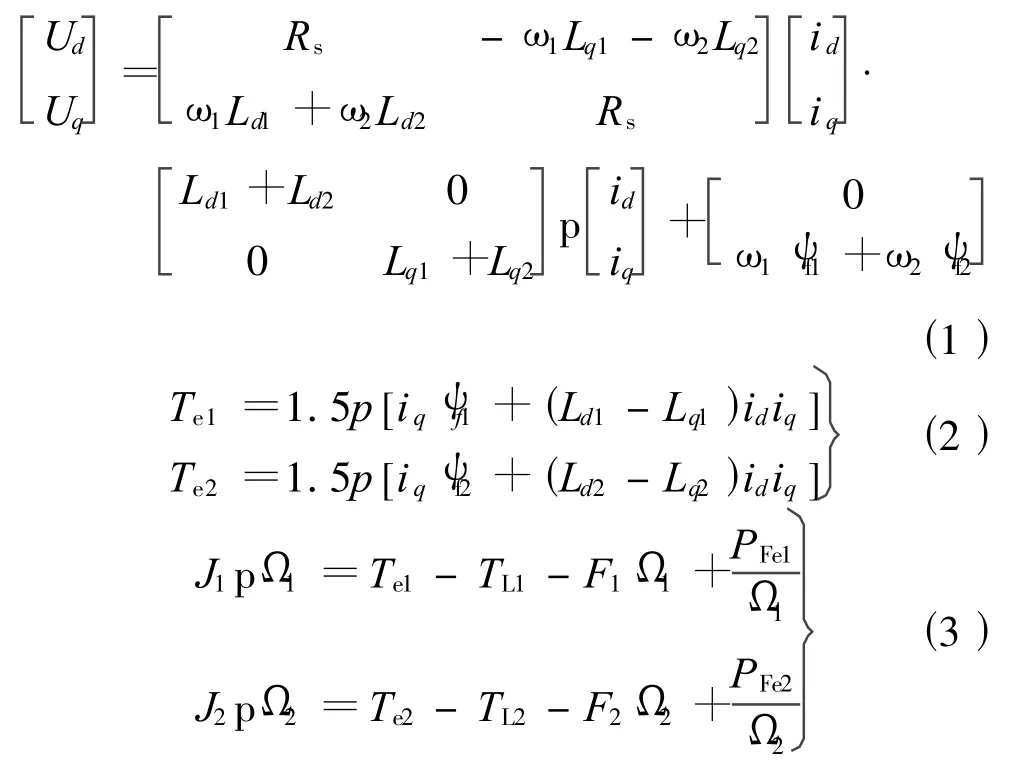
式中:id、iq為電機(jī)d、q軸的電流;Ld1、Lq1為內(nèi)轉(zhuǎn)子在d、q軸下的電感;Ld2、Lq2為外轉(zhuǎn)子的d、q軸電感;p為電機(jī)極對(duì)數(shù);J1、J2,ω1、ω2,Ω1、Ω2,TL1、TL2,F1、F2、PFe1、PFe2,ψf1、ψf2分別為內(nèi)外轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量,機(jī)械角速度,負(fù)載轉(zhuǎn)矩,阻尼系數(shù)和鐵耗、永磁磁鏈;Te1、Te2為內(nèi)外轉(zhuǎn)子的電磁轉(zhuǎn)矩;Te為總電磁轉(zhuǎn)矩;p Ω1、pΩ2為Ω1、Ω2的微分。
2.2 電磁關(guān)系
根據(jù)電動(dòng)機(jī)工作原理和數(shù)學(xué)模型,可得到內(nèi)電動(dòng)機(jī)和外電動(dòng)機(jī)的電磁關(guān)系:
式中:R1、R2,B1、B2,ξ1、ξ2,P1、P2為內(nèi)外轉(zhuǎn)子的轉(zhuǎn)子外徑,磁密,反電勢(shì)和電磁功率;lef為電樞的有效長度;I為電樞電流。
由式(4)可知,當(dāng)內(nèi)、外電動(dòng)機(jī)的外徑與磁密成反比時(shí),兩轉(zhuǎn)子的功率相等。由式(5)知,當(dāng)兩轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩和摩擦系數(shù)相等時(shí),兩轉(zhuǎn)子轉(zhuǎn)速相等。在滿足上述條件時(shí),兩電動(dòng)機(jī)的反電勢(shì)和磁鏈也相等。
2.3 矢量控制
矢量控制具有線性轉(zhuǎn)矩特性,控制效率高,調(diào)節(jié)器設(shè)計(jì)易于實(shí)現(xiàn),具有良好的起動(dòng)性能和較寬的調(diào)速范圍[9]。對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的數(shù)學(xué)模型經(jīng)過坐標(biāo)變換后,id、iq之間仍存在著耦合,要獲得良好的動(dòng)、靜態(tài)性能,就必須實(shí)現(xiàn)id、iq的解耦[10]。如能控制id≡0,整個(gè)控制過程中就沒有電樞反應(yīng)的去磁問題,不涉及電機(jī)參數(shù),實(shí)時(shí)性高、魯棒性好。此時(shí),對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的狀態(tài)方程式可簡(jiǎn)化為:
顯然,電流得到解耦,可以獨(dú)立調(diào)節(jié)iq,實(shí)現(xiàn)轉(zhuǎn)矩的線性控制。
3 仿真模型
3.1 電動(dòng)機(jī)本體模型
根據(jù)對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的數(shù)學(xué)模型,可以利用Matlab/Simulink建立電機(jī)的仿真模型,對(duì)兩個(gè)轉(zhuǎn)子分別輸入不同的負(fù)載轉(zhuǎn)矩,模擬水流擾動(dòng)時(shí)兩的螺旋槳的不同受力。這里僅以電動(dòng)機(jī)的機(jī)械模型為例,介紹其內(nèi)部結(jié)構(gòu),如圖3所示。
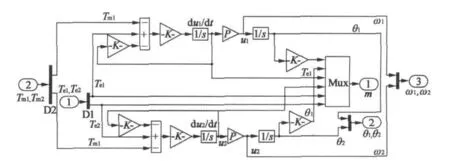
圖3 機(jī)械模型
3.2 矢量控制系統(tǒng)模型
對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)中,內(nèi)外電動(dòng)機(jī)的電樞電路串聯(lián),僅需要對(duì)定子電流進(jìn)行控制,就可以完成電機(jī)雙轉(zhuǎn)子的轉(zhuǎn)速和轉(zhuǎn)矩控制。矢量控制系統(tǒng)采用轉(zhuǎn)速、電流雙閉環(huán)控制,外環(huán)為轉(zhuǎn)速環(huán),內(nèi)環(huán)為電流環(huán),采用id=0控制。當(dāng)電動(dòng)機(jī)受到擾動(dòng)時(shí),兩個(gè)轉(zhuǎn)子的轉(zhuǎn)速產(chǎn)生差異,電機(jī)發(fā)生陀螺效應(yīng)。本文對(duì)內(nèi)外兩個(gè)轉(zhuǎn)子采用相同的參考轉(zhuǎn)速,分別進(jìn)行PI調(diào)節(jié);系統(tǒng)采用外轉(zhuǎn)子轉(zhuǎn)角進(jìn)行Park變換,讓內(nèi)轉(zhuǎn)子轉(zhuǎn)速跟隨外轉(zhuǎn)子轉(zhuǎn)速,可以保證電動(dòng)機(jī)擾動(dòng)后兩個(gè)轉(zhuǎn)子轉(zhuǎn)速迅速恢復(fù)相等。
控制系統(tǒng)主要包括對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)、三相逆變器、SVPWM模塊、Park變換、Clarke變換及其反變換、交直軸電流PI調(diào)節(jié)以及轉(zhuǎn)速PI調(diào)節(jié)、電動(dòng)機(jī)位置和轉(zhuǎn)速檢測(cè)、電流和電壓檢測(cè)電路等模塊。
根據(jù)前文建立的對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的數(shù)學(xué)模型,在Matlab/Simulink環(huán)境下搭建對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)矢量控制系統(tǒng)的仿真模型,如圖4所示。
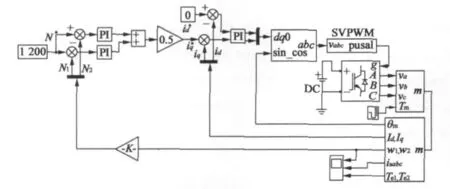
圖4 對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)控制系統(tǒng)的仿真模型
4 仿真結(jié)果及分析
仿真條件如下:極對(duì)數(shù)為6,額定功率為15 kW,兩轉(zhuǎn)子的額定轉(zhuǎn)速均為1 000 r/min,電阻0.05 Ω,內(nèi)外電動(dòng)機(jī)的交、直軸電感均為0.35 mH,粘滯系數(shù)和轉(zhuǎn)動(dòng)慣量均為0.065 N·m·s和0.75 kg·m2。仿真時(shí)間0.6 s,在0.1 s時(shí)設(shè)置兩轉(zhuǎn)子的負(fù)載為[8,14]N·m,模擬電動(dòng)機(jī)擾動(dòng)。在0.2 s時(shí)負(fù)載突降為[3,5]N·m,0.4 s時(shí)負(fù)載驟增為[20,20]N·m,得到電動(dòng)機(jī)轉(zhuǎn)速、轉(zhuǎn)矩響應(yīng)。
電動(dòng)機(jī)轉(zhuǎn)矩響應(yīng)如圖5所示,起動(dòng)后轉(zhuǎn)矩較大,因擾動(dòng)0.1 s時(shí)轉(zhuǎn)矩在12 N·m附近震蕩,0.2 s負(fù)載突降后很快穩(wěn)定在3 N·m,0.6 s負(fù)載驟增后又迅速穩(wěn)定到20 N·m。
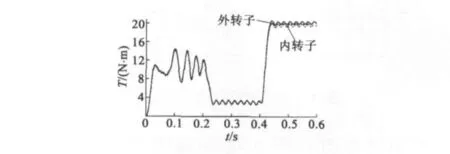
圖5 轉(zhuǎn)矩響應(yīng)曲線
圖6為電動(dòng)機(jī)兩個(gè)轉(zhuǎn)子的轉(zhuǎn)速曲線。0.1 s時(shí),由于電動(dòng)機(jī)擾動(dòng),兩轉(zhuǎn)子負(fù)載產(chǎn)生差異,轉(zhuǎn)速差別逐漸增大,但在相同的參考轉(zhuǎn)速和內(nèi)外轉(zhuǎn)子轉(zhuǎn)速跟隨的條件下,經(jīng)過0.05 s,兩轉(zhuǎn)子轉(zhuǎn)速差異越來越小,最終趨于相等。
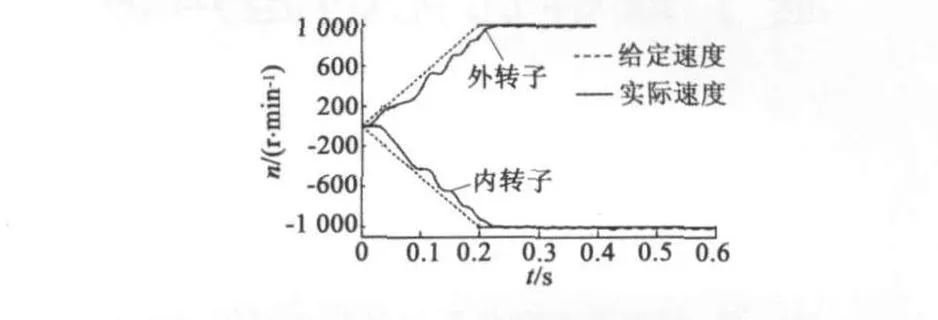
圖6 轉(zhuǎn)速響應(yīng)曲線
5 結(jié) 語
本文根據(jù)對(duì)轉(zhuǎn)永磁同步推進(jìn)電動(dòng)機(jī)的工作原理建立了電機(jī)的數(shù)學(xué)模型和仿真模型,探討了矢量控制技術(shù)在該種電機(jī)上的適用性,設(shè)計(jì)了電機(jī)擾動(dòng)情況下的雙轉(zhuǎn)子轉(zhuǎn)速跟隨技術(shù),仿真結(jié)果證明,矢量控制技術(shù)可以很好的實(shí)現(xiàn)對(duì)轉(zhuǎn)雙轉(zhuǎn)子永磁同步電機(jī)的調(diào)速,并解決了雙轉(zhuǎn)子的轉(zhuǎn)速跟隨問題。系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、控制精確,有很好的應(yīng)用前景。
[1] Gottipati P.Comparitive study of double rotor permanent magnet brushless motors with cylindrical and disc type slot-less stator[D].Louisiana State University,Baton Rouge,2007.
[2] 張鳳閣,劉光偉,陳進(jìn)華.異向旋轉(zhuǎn)雙機(jī)械口永磁電機(jī)磁路建模與場(chǎng)分析[J].電機(jī)與控制學(xué)報(bào),2009,13(6):804-809.
[3] Atsushi I,Hiroyasu S,Masato E.Magnetic characteristic analysis of dual-rotor machines[C]//Proceedings of the 12th International Symposium on Interdiscip linary Electromagnetic,Mechanic and Biomedical Problems.Bad Gastein,2007:173-177.
[4] 何苗.雙轉(zhuǎn)式永磁無刷電動(dòng)機(jī)的控制[J].微特電機(jī),2009,37(11):26-29.
[5] 張式勤,邱建琪,儲(chǔ)俊杰.雙轉(zhuǎn)式永磁無刷直流電動(dòng)機(jī)的建模與仿真[J].中國電機(jī)工程學(xué)報(bào),2004,24(12):176-181.
[6] Zhang F,Liu G,Shen Y,et al.Characteristic study on a novel PMSM with opposite-rotation dual rotors[C]//IEEE International Conference on Electrical Machines and Systems.Seoul,2007:805-809.
[7] 徐衍亮,王法慶,馮開杰,等.雙轉(zhuǎn)子永磁電機(jī)電感參數(shù)、永磁電勢(shì)及齒槽轉(zhuǎn)矩[J].電工技術(shù)學(xué)報(bào),2007,22(9):40-44.
[8] 劉光偉.異向旋轉(zhuǎn)雙轉(zhuǎn)子永磁同步電機(jī)基礎(chǔ)理論分析與仿真研究[D].沈陽:沈陽工業(yè)大學(xué),2008.
[9] 劉明丹,劉念.兩種基于Matlab對(duì)永磁同步電動(dòng)機(jī)矢量控制系統(tǒng)的仿真方法[J].微特電機(jī),2005,33(7):26-28.
[10] 薛山,溫旭輝.基于矢量空間解耦的五相永磁同步電機(jī)建模與仿真[J].微特電機(jī),2006(6):21-24.