1000kN/2500kNm鍛造操作機吊掛裝置仿真研究
2011-11-11 01:32:32張營杰房志遠衛凌云范玉林王宏亮馮東曉韓炳濤
重型機械 2011年2期
關鍵詞:模型
牛 勇,張營杰,房志遠,衛凌云,范玉林,王宏亮,馮東曉,韓炳濤
(金屬擠壓與鍛造裝備技術國家重點實驗室,陜西 西安 710032)
1 前言
鍛造操作機具有重載、精密、高速、智能、柔性等特點,與自由鍛造液壓機協調作業,可以大大提高生產能力、產品精度、生產效率和材料利用率,降低能耗。操作機本體部分包括鉗桿裝置、吊掛裝置、預應力機架、行走裝置等。其中,吊掛裝置直接決定鍛造操作機的工作空間、負載特性及動態響應特性[1-3]。
ADAMS軟件是目前世界上應用廣泛、具有權威性的機械系統動力學仿真分析軟件之一,已被廣泛應用到航空、航天、兵器、汽車和機械制造等各個行業[1,4-5]。
本文基于動力學系統分析軟件ADAMS,建立了1 000 kN/2 500 kNm鍛造操作機吊掛裝置的虛擬樣機模型,分析了上升和傾斜運動時各部件的運動及受力情況,仿真結果可以為鍛造操作機的設計制造提供指導。
2 1 000 kN/2 500 kNm鍛造操作機吊掛裝置介紹
1 000 kN/2 500 kNm鍛造操作機采用平行四邊形吊掛裝置,三維模型如圖1所示。該機構的特點是:吊掛裝置中鉗桿平行升降油缸斜置在墻板內側,對稱布置,可降低安裝高度,節約空間,并增加鉗桿提升高度;驅動轉臂繞安裝在兩側墻板上的鉸軸轉動,通過與轉臂相聯接的吊桿來帶動鉗桿裝置上升或下降;由于采用的是平行四邊形吊掛結構,鉗桿中心線在升降運動過程中一直平行于水平面;傾斜缸位于轉臂機構的上位,當傾斜缸進排液時,通過與轉臂相聯接的吊桿來帶動鉗桿后部上升或下降,從而使鉗桿向下或向上傾斜。
本文計算夾持重量為1 000 kN、夾持力矩為2 500 kNm時,上升和傾斜運動中操作機各部件的運動及受力。根據實際生產需要,1 000 kN/2 500 kNm鍛造操作機設計要求最大上升距離為2 000 mm,最大上傾角度為6°,最大下傾角度為10°,平升缸最大驅動力為4 500 kN,傾斜缸最大驅動力為4 000 kN。

圖1 1000kN/2500kNm鍛造操作機三維模型(a)本體(b)吊掛系統
3 模型的建立
采用ADAMS軟件進行系統分析一般包括幾何建模、機構約束、施加載荷、仿真分析及調試和結果處理等步驟[5]。本文建立幾何模型時,只考慮保證影響分析結果的主要尺寸,對細節尺寸不考慮。模型中的零部件及相互間約束見表1。

表1 模型中的約束副
4 仿真結果與討論
4.1 平行升降運動
圖2a為鉗桿高度隨平升缸伸長量的變化。分析表明,鉗桿高度與平升缸伸長量存在近線性關系,這種近線性可以為工程應用提供便利。同時,鉗桿最高可升高2 074 mm,滿足設計要求。圖2b為平升缸靜平衡驅動力隨平升缸伸長量的變化。分析表明,平升缸最大靜平衡驅動力為2 191 kN,最小靜平衡驅動力為2 045 kN,變化幅度為6.9%。平升缸靜平衡驅動力隨平升缸伸長量增大呈先增大后減小的趨勢,這主要是由于隨平升缸伸長量增加,平升缸與水平面夾角呈先減小后增大的趨勢,如圖2c所示。
4.2 傾斜運動
由于傾斜缸和鉗桿夾角對鉗桿傾斜角度以及傾斜缸靜平衡驅動力的大小都有影響,因此首先分析鉗桿處于水平位置時,平升缸伸長量對傾斜缸和鉗桿夾角的影響,如圖3所示。結果表明,鉗桿和傾斜缸夾角隨平升缸伸長量增加呈先減小后增大的趨勢,變化幅度不大,并且在90°附近。本文研究鉗桿處于最低位置、中間位置和最高位置時,傾斜角度和傾斜缸靜平衡驅動力隨傾斜缸伸長量的變化。

圖4a所示為鉗桿傾斜角度隨傾斜缸伸長量的變化(伸長量正值表示傾斜缸伸長,伸長量負值表示傾斜缸縮短;傾斜角度正值表示上傾,傾斜角度負值表示下傾)。分析表明,鉗桿位置對傾斜角度隨傾斜缸伸長量的變化影響不顯著;鉗桿傾斜角度與傾斜缸伸長量存在近似線性關系,這種近線性可以為工程應用提供便利。同時,鉗桿上傾角度最大值略大于6°,下傾角度略大于10°,滿足設計要求。圖4b所示為傾斜缸靜平衡驅動力隨傾斜缸伸長量的變化。分析表明,傾斜缸靜平衡驅動力隨傾斜缸伸長量增加呈減小的趨勢,最大值小于1 950 kN,變化幅度小于200 kN。傾斜缸靜平衡驅動力主要受鉗桿重心位置和鉗桿與傾斜缸夾角的影響,隨傾斜缸伸長量增加,鉗桿重心向傾斜缸一側移動,所以傾斜缸靜平衡驅動力減小。而傾斜缸靜平衡驅動力還受到鉗桿位置的影響。鉗桿處于最低位置時,隨傾斜缸伸長量增加,鉗桿與傾斜缸夾角從113°減小89.5°,如圖4c所示。傾斜缸靜平衡驅動力下降了193 kN,變化幅度為10.4%。鉗桿處于中間位置時,隨傾斜缸伸長量增加,鉗桿與傾斜缸夾角從94.2°減小到79.4°,傾斜缸靜平衡驅動力下降了 19.4 kN,變化幅度為1.1%。鉗桿處于最高位置時,隨傾斜缸行程增加,鉗桿與傾斜缸夾角從98.2°減小到81.7°,傾斜缸靜平衡驅動力下降了45 kN,變化幅度為2.8%。
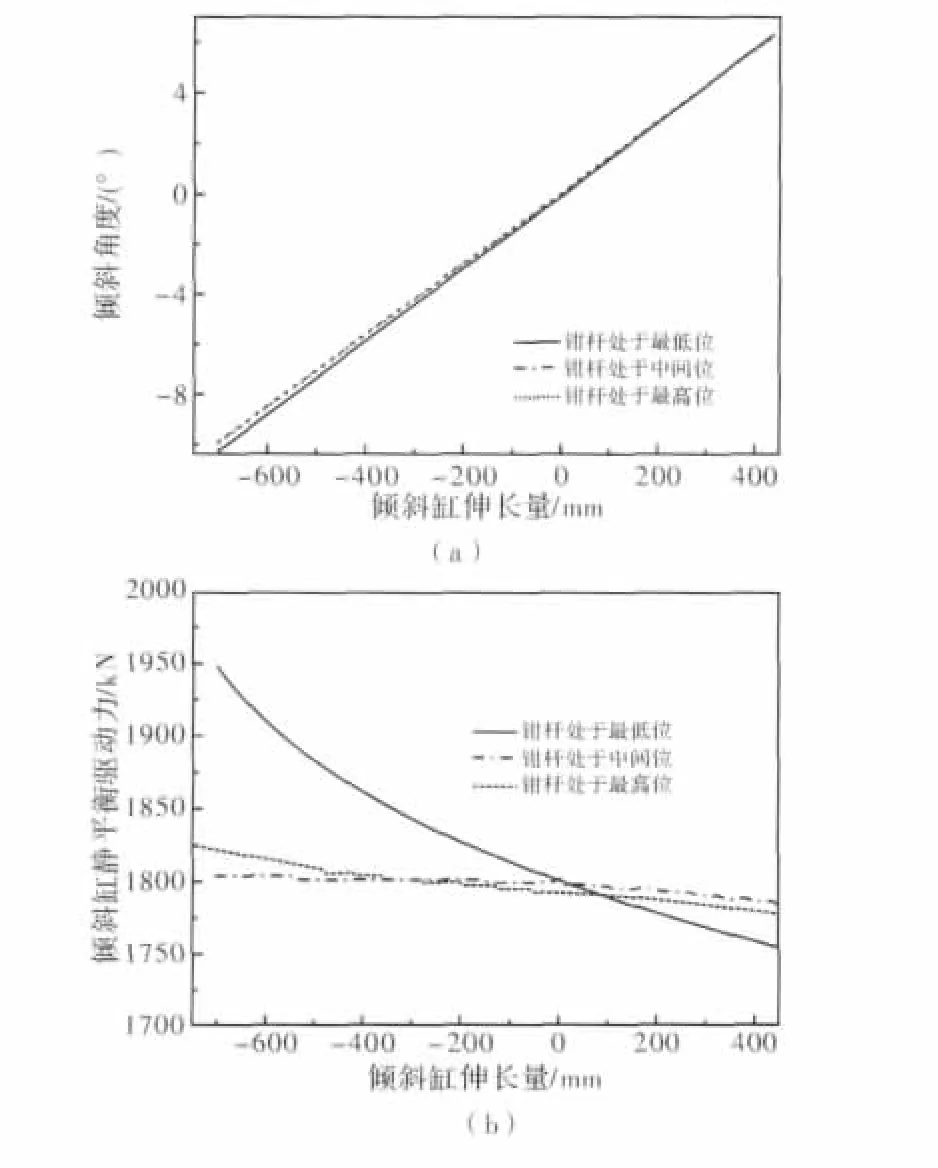

圖4 傾斜運動
5 結論
本文研究了上升和傾斜運動時,1 000 kN/2 500 kNm鍛造操作機吊掛裝置主要部件的運動及受力情況。結果表明,鉗桿最大平升高度、最大上傾和下傾角度、平升缸和傾斜缸靜平衡驅動力均滿足設計要求。平升缸靜平衡驅動力隨平升缸伸長量增大呈先增大后減小的趨勢;傾斜缸靜平衡驅動力隨傾斜缸伸長量增大而減小。兩組油缸驅動力變化幅度不大,系統運行平穩。
[1] 陳博翁,關立文,李鐵民.基于ADAMS的鍛造操作機動力學仿真及優化設計[J].機械設計與制造,2009,(3):6-8.
[2] 趙凱,王皓,陳關龍等.自由鍛造操作機順應過程分析[J].機械工程學報,2010,46(4):27-34.
[3] 余發國,高峰,郭為忠等.鍛造操作機的回顧與展望[J].機械設計與研究,2007,(專刊):12-15.
[4] 李團結,朱超.基于虛擬樣機技術的球形機器人運動仿真研究[J].系統仿真學報,2006,18(4):1026-1029.
[5] 鄭健榮.ADAMS虛擬樣機技術入門與提高[M].北京:機械工業出版社,2002.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
