多模全球導航衛星系統融合精密定軌
2011-11-04 13:14:56趙齊樂劉經南
測繪學報 2011年1期
李 敏,施 闖,趙齊樂,劉經南
1.武漢大學衛星導航定位技術研究中心,湖北武漢430079;2.武漢大學測繪學院,湖北武漢430079
多模全球導航衛星系統融合精密定軌
李 敏1,2,施 闖1,趙齊樂1,劉經南1
1.武漢大學衛星導航定位技術研究中心,湖北武漢430079;2.武漢大學測繪學院,湖北武漢430079
基于武漢大學自主研制的衛星導航系統綜合處理軟件(PANDA),利用全球實測的 GPS/GLONASS、GPS/Galileo試驗衛星(GIOVE)多模接收機數據進行 GPS、GLONASS、GIOVE衛星的融合精密定軌理論與方法研究。通過與IGS提供的GPS與GLONASS衛星精密軌道比較、軌道重疊弧段互差以及SLR觀測數據檢核等多種方法對融合計算的精密軌道精度進行了評定。
多模 GNSS;精密定軌;鐘差確定;PANDA軟件
1 引 言
衛星導航定位技術在近30年得到了迅猛發展,已廣泛地滲透到國家經濟建設的各個領域,極大地推動了國民經濟發展和相關領域的技術進步。繼美國的 GPS、俄羅斯 GLONASS后,目前,歐洲正在開發 Galileo衛星導航系統,我國也正在著手建立功能完善的第二代北斗衛星導航系統(Compass)。這些已建成或正在建設的全球導航衛星系統將組成新一代的全球導航衛星系統(global navigation satellite system,GNSS)。多模接收機將成為衛星導航定位從 GPS向 GNSS轉變的必然選擇,從而促進多導航系統數據融合這一新的研究方向的形成與發展。各全球衛星導航系統都是基于其特定的時空基準通過導航與精密軌道與衛星鐘差,如 GPS系統采用WGS-84參考框架,GLONASS系統采用 PZ-90參考框架,Galileo系統采用 GTRF參考框架,Compass系統也將形成該系統特定的參考框架。因此解決各導航系統的兼容與互操作問題,實現多模 GNSS數據融合,關鍵在于提供統一時空基準的導航衛星軌道與鐘差產品。
2 多模GNSS融合精密定軌數學模型
2.1 PANDA軟件算法介紹
筆者在 PANDA軟件的基礎上開展多模GNSS融合精密定軌與鐘差確定研究,在詳細敘述多模 GNSS融合精密定軌數學模型前,有必要介紹PANDA軟件的基礎算法。
(1)數據編輯采取Blewitt在1990年提出的單站單衛星數據自動方法,因此也適用于多模數據處理。對未修復的周跳引入新的模糊度參數,對未探測的周跳與粗差觀測值,在估計模塊的質量控制中進行處理。
(2)衛星軌道通過其初始時刻的參考狀態和力學模型參數描述。軌道積分器采用 Runge-Kutta起步,Adams-Moulton多步法預報校正。固體潮汐力、海洋潮汐力、太陽、月亮等第三體行星引力以及相對論效應引起的軌道攝動力模型參照IERS2003標準。重力場模型采用EGM96和EIGEN等通用重力場模型。衛星軌道積分算法和模型對多模導航系統基本一致。
(3)軟件采用的觀測模型與IERS規范一致,考慮盡可能多的改正項,包括所有被各 IGS數據分析中心運行軟件所采用的改正模型。未能精確模型化的誤差因素,通過參數估計吸收。
(4)PANDA軟件采用非差處理模式,非差數據處理獲取單衛星觀測方程,易于實現多模數據融合處理。參數估計模塊采用均方根信息濾波與最小二乘兩個并置的估計器,均方根信息濾波包括前向均方根信息濾波器(SRIF)和后向均方根信息平滑器(SRIS),SRIF能有效克服濾波器的發散,具有較高的數值穩健性和計算高效性,適合于觀測數據實時處理。最小二乘估計器主要應用于事后處理,這有利于節省計算時間和基于觀測值殘差的數據再編輯。PANDA軟件采用的觀測值模型、攝動力模型以及數據處理流程詳細可參見文獻[1—3]。
2.2 多模GNSS融合精密定軌觀測方程
GNSS觀測值中一般采用兩種最基本的觀測量,即偽距和載波相位觀測值。相比于單一導航衛星系統,由于不同導航系統間信號延遲的存在,因此在觀測方程中需顧及多模 GNSS系統間信號延遲量δtg。GPS衛星軌道與衛星鐘差產品精度在已有四大 GNSS導航系統中依然具有絕對領先優勢,因此在考慮δtg時,通常以 GPS衛星信號計算的接收機鐘差為參考。從而,偽距和載波相位非差觀測方程可描述為

式中,tr為觀測歷元真時刻;c為真空中光速;fi為接收到的 GNSS衛星發射的 i信號頻率;P(tr)、Φ(tr)分別表示偽距、載波相位觀測值;dt(tr)為衛星鐘差;dt(tr)為接收機鐘差;δtg(tr)為其他導航系統與 GPS系統硬件信號延遲量;dρtrop(tr)為對流層延遲;dρiono(tr)為電離層延遲;εP、εφ分別表示偽距、載波相位的多路徑、觀測噪聲等未模型化的影響;ρ(tr)為信號發射時刻的衛星位置到信號接收時刻接收機位置之間的幾何距離;N為模糊度參數。
為消除電離層影響,非差數據處理基于消電離層組合觀測值建立觀測方程,在式(1)的基礎上,可獲得多模GNSS融合精密定軌消電離層組合偽距(PC)觀測方程(2)和相位(L C)觀測方程(3)。

2.3 多模 GNSS融合精密定軌觀測模型與動力學模型
在導航衛星精定軌中,動力學信息和幾何觀測信息是可以被利用的兩大類信息。幾何觀測信息能提供離散的高精度觀測量;而動力學信息能夠在一定弧段內提供較為精確的連續運動狀態。GNSS融合精密定軌觀測模型與動力學模型與單導航系統精密軌道確定模型沒有實質差異,主要差異在于觀測模型中各導航系統觀測量精度不一致性以及需要顧及導航系統間信號延遲量。詳細觀測模型如表1所示。動力學模型如表2所示。

表1 多模GNSS融合精密定軌觀測模型Tab.1 Observation mode of multi-GNSS precise orbit determination
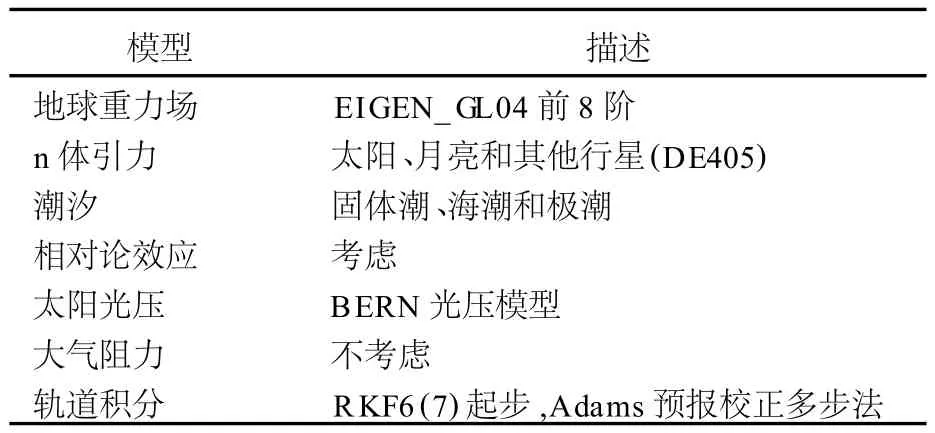
表2 多模 GNSS融合精密定軌動力學模型Tab.2 Dynamic mode of multi-GNSS precise orbit determination
3 多模GNSS融合精密定軌結果及分析
基于以上介紹的多模 GNSS融合精密定軌理論和方法,利用實測和仿真觀測數據進行了多模 GNSS融合精密定軌方法驗證,包括分別利用真實雙模觀測數據實現 GPS/GLONASS、GPS/Galileo導航系統融合精密定軌。
3.1 GPS/G LONASS融合精密定軌
GPS和 GLONASS是目前僅有能提供正常導航定位服務的導航衛星系統,在全球 IGS跟蹤站中,雙模接收機跟蹤站數量已達到130個左右,本文選取其中分布較為均勻的75個觀測站,計算統一時空框架下的 GPS和 GLONASS衛星軌道,跟蹤站分布如圖1所示。

圖1 GPS/GLONASS多模基準站分布圖Fig.1 GPS/GLONASS multi-mode stations
GPS/GLONASS融合精密定軌時間選取為2010年年積日第250天觀測數據,采用單天弧度模糊度浮點解策略,計算的 GPS/GLONASS衛星軌道采取與COD分析中心提供的精密軌道產品比較的策略進行軌道精度評定。軌道三維平均精度和徑向精度如圖2所示。
由于動力學模型精度,星座完整性以及觀測數據精度等各方面差異的存在,即使采用融合定軌算法,GPS與 GLONASS衛星軌道精度依然存在明顯的差異。從圖2可以看出GPS星座(G01~G32)平均三維軌道精度3 cm,而 GLONASS星座(R1~R24)平均三維軌道精度在6 cm左右,與 IGS發布的精密軌道精度相當。與導航定位緊密相關的軌道徑向精度均達到優于5 cm的精度。

圖2 GPS/GLONASS融合定軌精度Fig.2 GPS/GLONASS orbit precision
圖3為采用 GPS/G LONASS多模 GNSS融合精密定軌算法與GPS單導航星座定軌精度對比。

圖3 多模 GNSS融合定軌與單星座精密定軌比較Fig.3 Multi-GNSS orbit determination compared with single GNSS orbit determination
從圖3可以看出融合軌道精度與單星座軌道精度基本一致,存在稍微降低,約2 mm的精度損失,GPS單星座三維平均軌道精度為2.2 cm,采用融合算法后精度為2.4 mm,這主要由于多模GNSS觀測數據精度差異所致,在此處融合尚將不同導航系統觀測值視為等權精度。
3.2 GPS/G alileo融合精密定軌
為試驗和調試 Galileo系統的導航信號和服務質量,歐空局于2003年計劃發射兩顆試驗衛星GIOVE。GIOVE衛星跟蹤站由13個全球分布的 Galileo傳感器試驗站 GESS(Galileo experimental sensor stations)組成[4-5],其中國區域的唯一建站位于武漢大學校內。GESS跟蹤網配備有雙模接收機(Galileo experimental test receiver,GETR)。GESS跟蹤網分布圖如圖4所示。
利用圖4所示的13個 GPS/Galileo雙模觀測站數據,計算統一時空框架下的 GPS和 Galileo試驗衛星軌道。采用2007年年積日第125天—第131天一周觀測數據,以2 d為計算弧長定軌計算,該時期尚未發射 GIOVE-B衛星,融合定軌考慮 GPS星座與 GIOVE-A衛星。另外,由于沒有精密的 GIOVE衛星精密軌道,因此 GIOVE-A衛星 E1采取重疊弧度比較的方法進行精度評定,GPS衛星星座則采取與IGS精密軌道精度比較的方法評定精度,圖5為其中第126天軌道均方差(RMS)統計。

圖4 GESS全球跟蹤站Fig.4 GESS stations

圖5 GPS/Galileo融合定軌精度Fig.5 GPS/Galileo orbit precision
從圖5可以看出,由于地面跟蹤站僅有13個,各衛星幾何觀測條件較弱,因此精度較低,徑向精度優于10 cm,三維平均精度優于30 cm,GIOVE-A衛星達到與 GPS衛星星座一致的精度水平。
為了進一步評定 Galileo試驗衛星精密定軌精度,采取了激光測距(SLR)檢核的方法。圖6為利用激光測距觀測數據對融合定軌方法計算的連續一周GIOVE-A衛星軌道的檢校序列。

圖6 激光測距檢核 GIOVE-A衛星軌道Fig.6 SLR validation
如圖6所示,圖中深色表示 SLR檢核殘差,淺色表示SLR殘差對應的高度角。該周SLR檢較均方差達到9.4 cm,與重疊弧度檢驗精度基本一致。
4 結束語
實測 GPS/GLONASS、GPS/Galileo載波相位和偽距觀測數據的多模 GNSS融合定軌試驗,通過與IGS提供的 GPS與 GLONASS衛星精密軌道比較,軌道重疊弧段互差以及SLR觀測數據檢核等多種方法對融合計算的精密軌道精度進行了評定。結果顯示,采用 PANDA軟件與本文介紹的非差融合處理方法,GPS和 GLONASS衛星軌道三維精度分別達到2.5 cm和6 cm,GIOVE衛星軌道三維精度優于30 cm,徑向精度達到了10 cm的水平,與 IGS定軌精度水平相當。從這些初步結果可以看出,PANDA軟件已經初步具備高精度多模 GNSS融合數據處理功能,另一方面證實了本文提出的基于非差模式的多模 GNSS衛星融合精密定軌理論與方法的可行性。
筆者利用實測多模觀測數據實現了統一框架下的多導航系統衛星精密軌道與鐘差確定,該方法同樣適用于我國Compass系統與其他導航系統融合精密定軌與鐘差確定,通過提供Compass與其他導航系統統一時空框架下的衛星軌道與鐘差產品,將促進我國Compass系統的全面推廣與應用,尤其是在尚未構成完整Compass星座時。
[1] LIU Jingnan,GE Maorong.PANDA Software and Its Preliminary Result of Positioning and Orbit Determination[J].Wuhan University Journal of Natural Sciences,2003,8(2):603-609.
[2] ZHAO Qile.Research on Precision Orbit Determination Theroy and Software of Both GPS Navigation Constellation and LEO Satellites[D].Wuhan:Wuhan University,2004.(趙齊樂.GPS導航星座及低軌衛星的精密定軌理論和軟件研究[D].武漢:武漢大學,2004.)
[3] ZHAO Qile,LIU Jingnan,GE Maorong,et al.Applications of Square-root Information Filtering and Smoothing on Orbit Determination of LEO Satellites with On-board GPS Data[J].Wuhan University Journal ofNaturalSciences,2006,31(1):12-15.(趙齊樂,劉經南,葛茂榮,等.均方根信息濾波和平滑及其在低軌衛星星載 GPS精密定軌中的應用[J].武漢大學學報:信息科學版,2006,31(1):12-15.)
[4] PIRIZ R,TAVELLA P,FALCONE M,et al.The GalileoSystem Test Bed V2 for Orbit and Clock Modeling[C]∥Proceedings of ION GNSS 2006. FortWorth:[s.n.],2006.
[5] URSCHL C,BEUTLER G,GURTNER W.Orbit Determination for GIOVE-A Using SLR Tracking Data[C]∥Proceedings of the 15th International Workshop on Laser Ranging.Auckland:EOS Space Systems Pty Limited,2008:40-46.
[6] ZHAO Qile,LIU Jingnan,GE Maorong.High Precision Orbit Determination of CHAMP Satellite[J].Geo-spatial Information Sciences,2006,9(3):180-186.
[7] CRISCI M,HOLLREISER M,FALCONE M,et al.GIOVE MissionSensorStation ReceiverPerformance Characterization:Preliminary Results[C]∥Navitec 2006.Noordwijk:ESTEC,2006.
[8] SIMSKY A,SLEEWAEGEN J M,HOLLREISER M,et al.Performance Assessment of Galileo Ranging Signals Transmitted by Gstb-V2 Satellites[C]∥Proceedings of ION GNSS 2006.Fort Worth:[s.n.],2006.
[9] SPRINGER T A,BEUTLER G,ROTHACHER M.A New Solar Radiation Pressure Model for GPS Satellites[J].GPS Solutions,1999,2(3):50-62.
[10] PANY T,IRSIGLER M,EISSFELLER B,et al.Code and Carrier Phase Tracking Performance of a Future Galileo RTK[C]∥Proceedings of theEuropean Navigation Conference ENC-GNSS 2002. Copenhagen:[s.n.],2002:27-30.
[11] GATTI G,GARUTTI A,MANDORLO G,et al.The GIOVE-A Satellite:From Design to in-orbit Commissioning[C]∥Proceedings of ION GNSS 2006.Fort Worth:[s.n.],2006.
[12] MERCIER F,LAURICHESSE D,DELPORTE J,et al.First GIOVE-A Orbit Determination at CNES[C]∥Proceedingsof EGU General Assembly.Vienne:[s.n.],2007.
[13] GENG Tao.Real-time Precise Orbit Determination Theory for Navigation Satellite and Its Experimental Application Based on RegionalReferenceStations[D]. Wuhan:Wuhan University,2009.(耿濤.基于區域基準站的導航衛星實時精密定軌理論方法與試驗應用[D].武漢:武漢大學,2009.)
(責任編輯:雷秀麗)
Multi-GNSS Precision Orbit Determination
LI Min1,2,SHI Chuang1,ZHAO Qile1,LIU Jingnan1
1.Research Center of GNSS,Wuhan University,Wuhan 430079,China;2.School of Geodey and Geomatics,Wuhan University,Wuhan 430079,China
Based on the self-developed software PANDA,this paper carries out investigations on integrated precise orbit and clock offset determination of multi-GNSS.Then precise orbit and clock offset determination of GPS,GLONASS and GIOVE have been implemented through actual global multi-mode receiver data,including GPS/GLONASS,GPS/Galileo experimental satellites(GIOVE).By comparison with IGS provided precise orbits for GPS and GLONASS,together with differences of orbit overlap arc,and SLR observable validation,accuracy of the integrated precise orbit have been evaluated.
multi-GNSS;precise orbit determination;satellite clock offset determination;PANDA
LI Min(1983-),male,PhD candidate,majors in GNSS satellite orbit determination.
P228
:A
國家自然科學基金 (40904007,40804004);湖北省自然科學基金(2010CDA069)
1001-1595(2011)S-0026-05
2011-01-12
修回日期:2011-03-20
李敏(1983-),男,博士生,主要研究方向為導航衛星精密定軌與精密定位。
E-mail:lim@whu.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19