基于鍵合圖模型的新型故障樹(shù)故障診斷方法
2011-07-26 11:03:46帕孜來(lái)提馬合木提
自動(dòng)化儀表 2011年11期
帕孜來(lái)提·馬合木提 張 健
(新疆大學(xué)電氣工程學(xué)院,新疆 烏魯木齊 830049)
0 引言
傳統(tǒng)故障樹(shù)的生成基本上依賴(lài)于工作人員憑借經(jīng)驗(yàn)對(duì)可能發(fā)生的故障進(jìn)行預(yù)計(jì)、對(duì)過(guò)去發(fā)生過(guò)的故障事例及故障統(tǒng)計(jì)進(jìn)行廣泛的調(diào)查來(lái)得到[1]。這種方法對(duì)系統(tǒng)故障的分析并不全面,而且應(yīng)用較繁瑣。
鍵合圖模型作為一種知識(shí)表示法,不需要用戶提供系統(tǒng)的精確參數(shù),它是通過(guò)分析系統(tǒng)的能量傳遞來(lái)描述系統(tǒng)的動(dòng)態(tài)行為。這種知識(shí)表示法對(duì)于創(chuàng)建復(fù)雜的結(jié)構(gòu)因果推理關(guān)系是非常合理有效的,具有很好的應(yīng)用前景[2]。
本文探討了一種根據(jù)系統(tǒng)鍵合圖模型建立故障樹(shù)來(lái)進(jìn)行系統(tǒng)故障診斷的方法,此方法屬于故障定性診斷法,只需得到特征值的變化趨勢(shì)即可。與定量故障診斷方法相比較,該方法計(jì)算量小,且對(duì)模型精確度要求相對(duì)較低,更具靈活性和有效性[3]。
1 故障診斷方法流程
基于鍵合圖模型的故障樹(shù)故障診斷方法的流程圖如圖1所示。由流程圖可知,該方法的核心是系統(tǒng)故障樹(shù)的獲取。
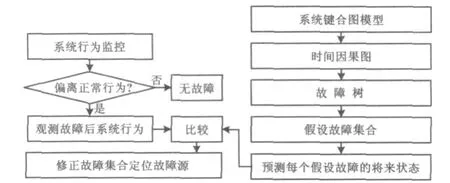
圖1 故障診斷方法流程圖Fig.1 Flowchart of the new type of fault diagnosis method
故障樹(shù)是根據(jù)鍵合圖模型中提供的系統(tǒng)元件參數(shù)和變量間的因果關(guān)系推理得出的,鍵合圖模型的各個(gè)元件中涉及的所有參數(shù)和變量統(tǒng)一分為起因和結(jié)果兩大類(lèi)。
鍵合圖模型描述系統(tǒng)變量之間的關(guān)系,系統(tǒng)變量與鍵合圖的鍵相聯(lián)系,由勢(shì)變量e與流變量f組成。e與f之間的關(guān)系取決于鍵合圖元件定義的方程與鍵合圖上標(biāo)注的因果關(guān)系。
根據(jù)鍵合圖因果關(guān)系的設(shè)置規(guī)則可知,鍵合圖基本元素(簡(jiǎn)稱(chēng)鍵合圖元)可能獲得的因果關(guān)系的分配是不同的[4]。
鍵合圖中的九個(gè)基本元件為:結(jié)(0結(jié)、1結(jié))、源(Se、Sf)、阻抗(R、C、I)、轉(zhuǎn)換器 GY 和變換器 TF,根據(jù)表示其特性的數(shù)學(xué)方程標(biāo)注其因果關(guān)系。容性和慣性鍵合圖元根據(jù)預(yù)先設(shè)定的積分或微分形式的不同,它們所對(duì)應(yīng)的因果關(guān)系也不同;阻性鍵合圖元的因果關(guān)系可按與其他元件因果關(guān)系匹配任意選取;0結(jié)或1結(jié)屬于多通口鍵合圖元,其因果關(guān)系比較復(fù)雜,主要取決于其定性表達(dá)式的形式[5]。
2 時(shí)間因果圖
為解決具有非線性、耦合性的多領(lǐng)域復(fù)雜混合系統(tǒng)的故障診斷問(wèn)題,在基于定性模型診斷方法和信號(hào)處理等技術(shù)的基礎(chǔ)上,Mosterman提出用鍵合圖模型建立時(shí)間因果圖(time causal graph,TCG)來(lái)進(jìn)行故障診斷的方法。
因果圖用來(lái)描述系統(tǒng)參數(shù)與變量之間的因果關(guān)系,時(shí)間因果圖則是包含時(shí)間特性關(guān)系的增廣因果圖。時(shí)間因果圖由信號(hào)流圖引出,并由圖解表示動(dòng)態(tài)系統(tǒng)特性。時(shí)間因果圖是一種有向圖,它由節(jié)點(diǎn)、有向線段和標(biāo)注組成,每一個(gè)節(jié)點(diǎn)表示系統(tǒng)的一個(gè)變量,有向線段表示節(jié)點(diǎn)之間的關(guān)系。
時(shí)間因果圖標(biāo)注如表1所示。
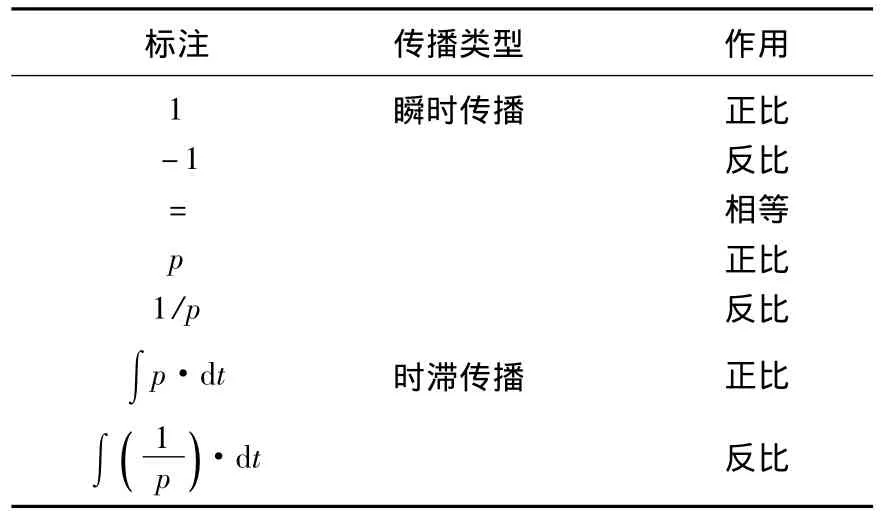
表1 時(shí)間因果圖標(biāo)注Tab.1 The label of TCG
在線性時(shí)不變系統(tǒng)中,p為常數(shù),然而在時(shí)變線性系統(tǒng)中p不是常數(shù),其根據(jù)時(shí)間與系統(tǒng)其他變量的值來(lái)影響v2與v1之間的關(guān)系。
時(shí)間因果圖是一種有向圖,則一個(gè)時(shí)間因果圖可以表示為 <V,E>,即:

式中:V={ei,fi},i∈BG、E 的數(shù)量;E= < {e,標(biāo)注}> ,e=(x,y),x、y∈V,標(biāo)注 ={= ,1,-1,p,1/p,p?t
3 故障診斷算例
3.1 雙容水箱時(shí)間因果圖
雙容水箱液位控制系統(tǒng)結(jié)構(gòu)如圖2所示。

圖2 系統(tǒng)結(jié)構(gòu)圖Fig.2 Structure of system
圖2中,系統(tǒng)包括上下水箱、水泵以及V1、V12、V2三個(gè)出水閥。
根據(jù)鍵合圖理論,水箱對(duì)應(yīng)鍵合圖中的容性元件C1、C2,閥門(mén)對(duì)應(yīng)于阻性元件 R1、R12和 R2,水泵一般采用流源Sf表示。
雙容水箱系統(tǒng)的鍵合圖模型如圖3所示。
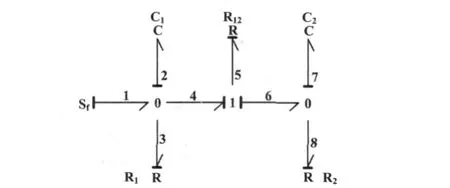
圖3 雙容水箱的鍵合圖模型Fig.3 The BG model of dual-volume water tank
雙容水箱系統(tǒng)的因果類(lèi)型模式表如表2所示,進(jìn)而建立系統(tǒng)的時(shí)間因果圖如圖4所示。

表2 因果類(lèi)型模式表Tab.2 Causality type mode
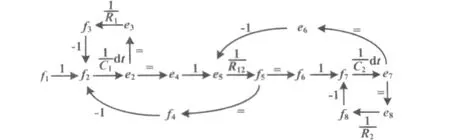
圖4 系統(tǒng)時(shí)間因果圖Fig.4 TCG of the system
3.2 雙容水箱系統(tǒng)故障樹(shù)的建立
當(dāng)發(fā)現(xiàn)觀測(cè)量偏離正常狀態(tài)時(shí),利用時(shí)間因果圖向后推理,建立系統(tǒng)的故障樹(shù),從而生成假設(shè)故障集合。如在雙容水箱系統(tǒng)中,假設(shè)故障現(xiàn)象為壓力e7增大,則生成的系統(tǒng)故障樹(shù)如圖5所示。

圖5 系統(tǒng)故障樹(shù)Fig.5 Fault tree of the system
根據(jù)圖5所示的系統(tǒng)故障樹(shù),可生成故障集合:{C2-、R2+、R12-、C1-、R1+}。假設(shè)故障的前向推理圖如圖6所示。
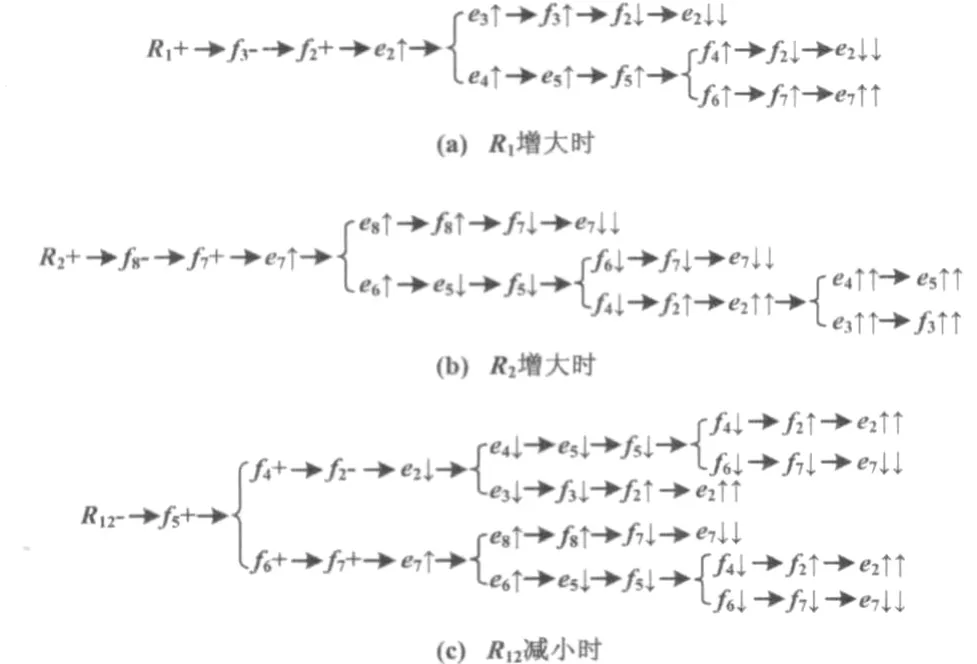
圖6 假設(shè)故障的前向推理圖Fig.6 The forward illative map of hypothetic fault
由系統(tǒng)故障樹(shù)推理出的結(jié)果是一個(gè)假設(shè)故障集合,表示所有可能發(fā)生此故障的原因。要想得出真正引起故障的原因,還須根據(jù)時(shí)間因果圖,對(duì)假設(shè)故障集合中的每個(gè)故障定性地預(yù)測(cè)引起系統(tǒng)參量變化的原因及趨勢(shì),生成各種假設(shè)故障下系統(tǒng)的參數(shù)變化趨勢(shì)。本文只考慮管道的故障,所以對(duì)故障集合中的R2+、R12-、R1+分別進(jìn)行推理預(yù)測(cè)。
對(duì)假設(shè)故障中的每個(gè)可能故障原因(R2+,R12-,R1+)進(jìn)行前向推理,定性預(yù)測(cè)系統(tǒng)在此故障情況下的將來(lái)狀態(tài),具體表現(xiàn)為有關(guān)參量的變化趨勢(shì)。在各故障情況下,系統(tǒng)各參量 e7、e2、f2、f3、f7的變化趨勢(shì)如表3所示。
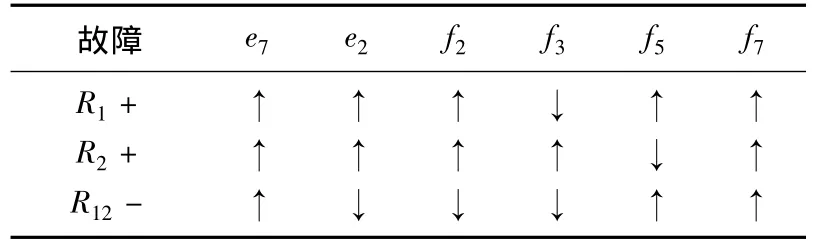
表3 參量的變化趨勢(shì)Tab.3 Varying trend of the variants
3.3 故障診斷
根據(jù)被控對(duì)象的鍵合圖模型,在20-sim仿真軟件中建立雙容水箱液位控制系統(tǒng)的仿真模型。本文假設(shè)故障現(xiàn)象為e7增大。
無(wú)故障時(shí)仿真結(jié)果如圖7所示。其中閥V1的流量為f3。
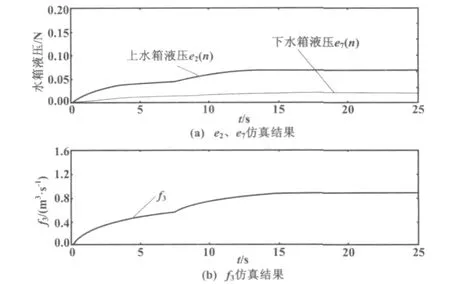
圖7 無(wú)故障時(shí)仿真結(jié)果Fig.7 Simulation results when there is no fault
采用斜坡信號(hào)和定值信號(hào)相加設(shè)置管道堵塞的緩變故障,鍵合圖中用可調(diào)制阻性元件MR來(lái)實(shí)現(xiàn)阻性元件參數(shù)的可變性。
故障時(shí)間均設(shè)置在t=10 s時(shí)開(kāi)始,當(dāng)不同故障的發(fā)生引起e7增大時(shí),模型仿真得到參數(shù)e7、e2、f3的變化曲線如圖8所示。

圖8 不同故障下的仿真結(jié)果Fig.8 Simulation results under different fault
將圖8在不同故障下的仿真結(jié)果與表2進(jìn)行對(duì)比,可以得到故障診斷結(jié)果如表4所示。結(jié)果表明,這與仿真中所假定的故障也是一致的。
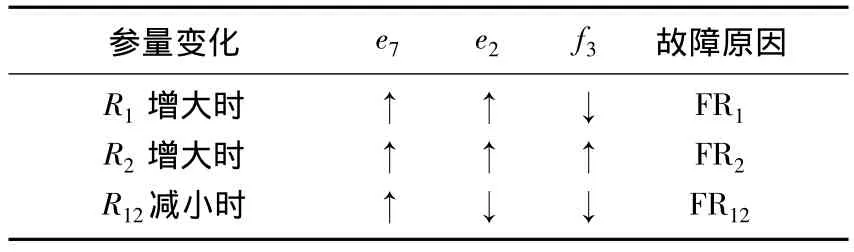
表4 故障診斷結(jié)果Tab.4 Results of fault diagnosis
4 結(jié)束語(yǔ)
本文提出采用鍵合圖模型建立系統(tǒng)故障樹(shù)來(lái)進(jìn)行故障診斷的方法,以雙容水箱系統(tǒng)為對(duì)象,較全面地分析了該方法的實(shí)現(xiàn)步驟并進(jìn)行了仿真。實(shí)際系統(tǒng)的故障推理與仿真結(jié)果的對(duì)比證明了此診斷方法的正確性。與其他故障診斷方法相比,該方法具有計(jì)算量少和對(duì)模型精確度要求低等顯著優(yōu)點(diǎn)[7]。
[1]周東華,孫優(yōu)賢.控制系統(tǒng)的故障檢測(cè)與診斷技術(shù)[M].北京:清華大學(xué)出版社,1994:8-30.
[2]王中雙.鍵合圖理論及其在系統(tǒng)動(dòng)力學(xué)中的應(yīng)用[M].哈爾濱:哈爾濱工程大學(xué)出版社,2007:1-35.
[3]楊昌昊,胡小建,竺長(zhǎng)安.從故障樹(shù)到故障貝葉斯網(wǎng)映射的故障診斷方法[J].儀器儀表學(xué)報(bào),2009,30(7):1481 -1482.
[4]楊錫運(yùn),徐大平.鍵合圖在火電廠熱工對(duì)象建模中的應(yīng)用[J].控制工程,2005,30(7):18 -24.
[5]邵延峰,薛紅軍.故障樹(shù)分析法在系統(tǒng)故障診斷中的應(yīng)用[J].中國(guó)制造業(yè)信息化,2007(1):72-74.
[6]歐陽(yáng)丹彤,歐陽(yáng)繼紅,劉大有.基于模型診斷的研究與進(jìn)展[J].吉林大學(xué)學(xué)報(bào):自然科學(xué)版,2001,28(4):30-35.
[7]趙劍,歐陽(yáng)丹彤.MBD中通過(guò)混合鍵合圖對(duì)混合系統(tǒng)建模[J].長(zhǎng)春大學(xué)學(xué)報(bào):自然科學(xué)版,2007,24(10):19-23.
猜你喜歡
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
