手持GPS定位精度與誤差的研究①
2011-07-18 03:49:50王克曉李鳳友劉煥玲邢衛軍任洪文
全球定位系統 2011年6期
關鍵詞:測量
王克曉,李鳳友,劉煥玲,邢衛軍,任洪文
(1.天津鐵道職業技術學院,天津300240;2.中國測繪科學研究院,北京100830;3.山東黃金焦家金礦,山東 萊州261441)
0 引 言
手持式GPS是一種利用新一代衛星導航與定位系統,體積小巧、攜帶方便的定位導航設備,具有全天候、全方位實時三維導航與定位能力[1-2]。
隨著全球定位系統的發展,手持式GPS廣泛應用于國民經濟各領域。目前,無論是靜態測量型、動態(RTK)還是手持導航等機型已廣泛應用于大地測量、地質調查、資源勘查等眾多領域,并逐步深入到人們的日常生活。近幾年,隨著技術的不斷完善以及美國SA政策的解除,手持GPS接收機的定位精度較之以前有了很大的提高。
鄧鐘對基于手持式GPS野外導航地圖的制作研究中提到單點定位精度可達到其標稱的10m以內的精度,若做一些差分處理,可達到1~5m以內的精度,在比例尺為1∶10 000的地圖上誤差不到1mm[3].王曉明在提高手持GPS定位精度的方法研究中提到,標準五參數設置法平面中誤差為3.6m,三維中誤差為5.6m[4].需要系統地研究手持式GPS使用精度以及誤差影響。
1 手持機的簡介
手持機根據定位精度可以分為:米級、亞米級。其中亞米級中包括精度更高的10~30cm精度的手持機和10cm以內精度的手持機。
手持機的主要應用領域:國土調查及執法監察、電力線巡檢、配電GIS系統、數字城市、林業資源調查、污染源普查、地質調查、地籍測量、農業、通訊行業和市政工程等。
產品特點與功能:高分辨率VGA顯示器可顯示清晰地圖;具有Bluetooth和無線局域網連接選項;1GB內置存儲器和SD可拆除卡插槽;Windows Mobile v6操作系統;堅固耐用的手持機內置可供全天使用的電池;支持北京54、西安80、國家2000及用戶自定義坐標系統,多種數據格式的輸出可為不同平臺軟件直接提供可以使用的數據,輸出文件格式包括采用了行業標準的數據接口結構,支持多種GIS或者CAD平臺。
2 手持GPS定位試驗方案
手持GPS定位穩定性研究主要包含觀測時長和內符合精度兩方面的內容。所謂的觀測時長就是指測定一個點需要多長時間才能使觀測結果的精度比較高而且穩定;內符合精度是指在不同的觀測時段測定同一個點的結果的符合程度[5-7]。
2.1 觀測時長對定位精度影響的試驗
分別采用3臺天寶手持GPS(型號GeoXH)對某校區內的點進行實測,在同一個點上每間隔一定時間記錄一次觀測結果,觀測結果如表1所示。
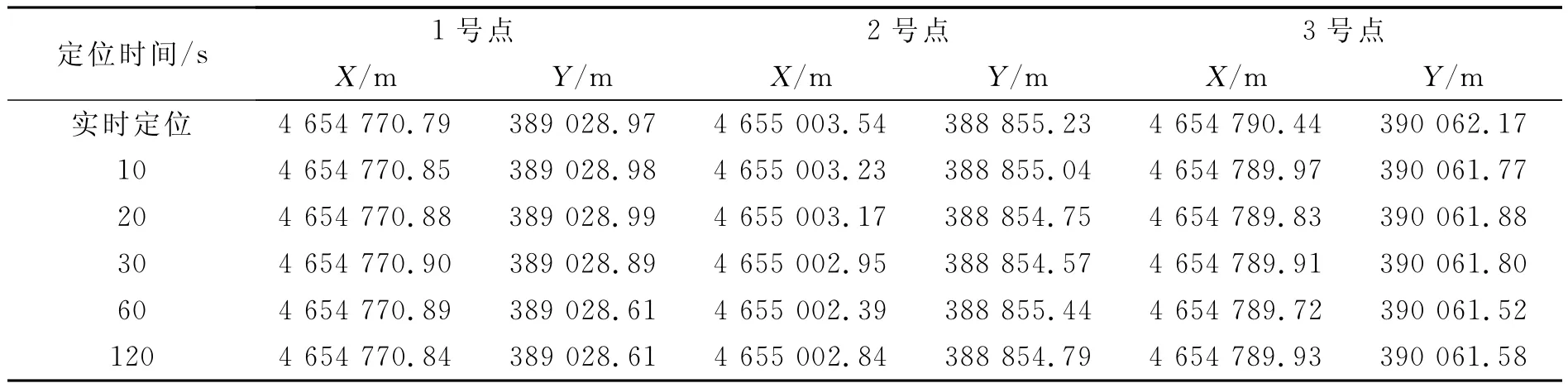
表1 手持式GPS的不同時長的定位結果
1)快速觀測結果分析
從表1中可以看出,使用的3臺手持式GPS測量的穩定性與時間的關系是一致的,當在1個點上持續觀測1min以上時,3臺儀器各自測定的X互差最大值在1m以內,Y坐標各自測定的互差最大值在1m以內,與真實值的差值在1m以內,由此可以得出,其觀測結果基本達到穩定狀態。
2)實時動態結果分析
從表1中觀測時間為10s的結果與觀測時間為30s以及以后的觀測值相比較,X坐標值差值最大的為0.84m左右,最小的達到0.06m左右;Y坐標最大的差值在0.87m左右,最小的差值在0.36m左右。顯然,動態觀測結果跳躍較小,穩定性相對不錯。
2.2 內符合精度大小的試驗
評價儀器的可靠性需要從儀器的精度和儀器的穩定性兩方面入手。對于同一臺手持機如果外界觀測條件一樣,只是觀測的時間段不一樣,得到差別較大的測量結果,而測量結果的差異又沒有規律,這樣無法談論儀器的可靠性和精度[8-9]。針對這種情況,試驗中通過不同的時間段對相同的點重復的觀測研究儀器的穩定性。通過在不同的觀測時間段重復觀測相同的點來研究手持機的穩定性。重復觀測選在上午10點和下午3點兩個時間段,重復觀測相同的點位,由此可以得出,相同點兩次觀測求差結果如表2所示。
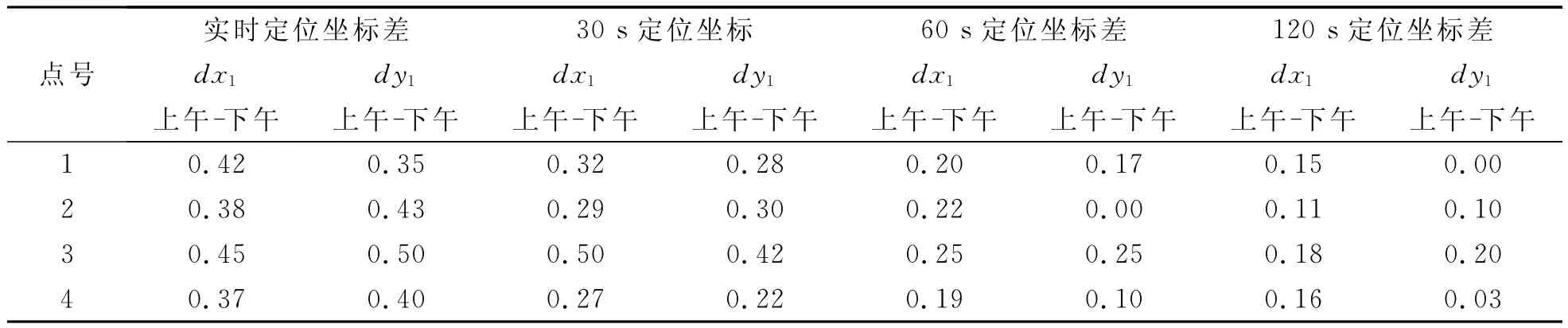
表2 相同點兩次觀測求差
根據表2中的數據利用公式(1)可以計算出4種觀測時長的測量穩定度。

式中的L為相同觀測時長的不同觀測時段的觀測值較差;n為較差的個數。
實時定位的穩定度為 mL=±0.41m;
30s定位的穩定度為 mL=±0.34m;
60s定位的穩定度為 mL=±0.19m;
120s定位的穩定度為 mL=±0.13m.
當某一個點受到外界的影響變化相對較大時,這個點的數據必須被剔除掉。在這次試驗中,點3由于受到外界建筑物的影響,在計算穩定度時剔除該點,則
實時定位的穩定度為 mL=±0.38m;
30s定位的穩定度為 mL=±0.28m;
60s定位的穩定度為 mL=±0.17m;
120s定位的穩定度為 mL=±0.11m.
據以上數據可以得出,手持GPS定位時長120s以上的穩定度要比實時定位穩定度高3倍,定位時長60s和120s的穩定度可以認為是同等的。
2.3 手持GPS絕對定位精度試驗
絕對定位精度是指測量值與真實值的符合程度,手持GPS絕對定位的準確度指測量的結果與其真實位置符合程度。為了使真實坐標更加準確,采用國家80坐標為基礎進而解算出來的坐標(也就是地方80坐標);通過坐標轉換模型,將國家80坐標轉換成手持式GPS的設置坐標,也就是WGS-84坐標。真實坐標的點位誤差相對于手持式GPS的定位誤差的影響非常小,可以忽略不計,這種地方坐標值可以認為是坐標真值。觀測值與其差值就是真誤差Δ,依據公式

可以得出6種不同觀測時長的絕對定位精度列于表3中。
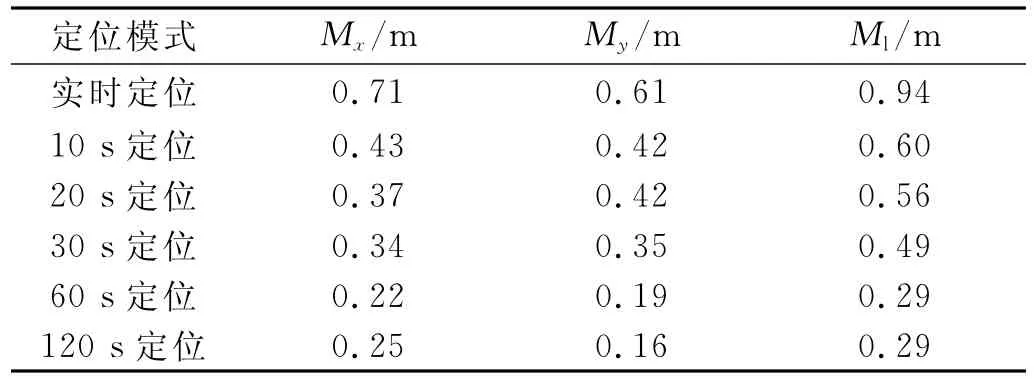
表3 剔除粗差前的外符合精度
將dx或dy的值的水平精度偏低的點認為含有粗差,所以將這些點剔除重新進行外符合精度分析,如表4所示。
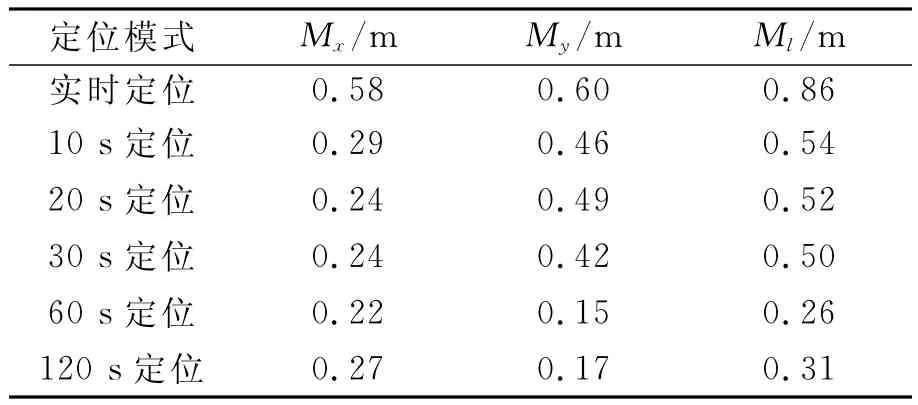
表4 剔除粗差后的外符合精度
根據表3和表4可得:實時定位的精度最低,相對于剔除粗差前的精度有所提高。20s和30s的定位精度基本相同;60s和120s的定位精度最高,可以認為定位精度相同。
2.4 手持GPS相對定位精度試驗
由于距離測量是通過兩端點的坐標計算而獲得,故在此將距離測量稱為相對定位,因此,手持式GPS相對定位精度也即距離測量精度。在試驗中采用了同步相對定位和異步相對定位2種方法。同步相對定位指計算距離的兩端點坐標為同步觀測值,異步相對定位指計算距離的兩端點坐標為異步觀測值。觀測結果見表5.
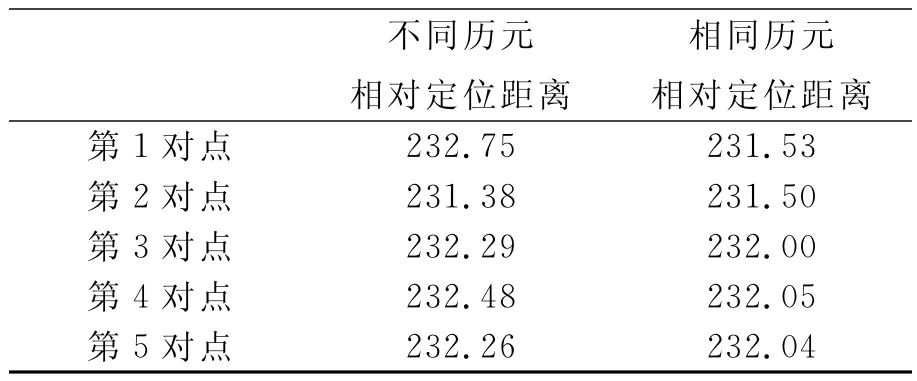
表5 相對定位精度
這5段距離的實際長度都是232m.由表4不難看出:同步距離測量要比異步距離測量結果穩定且精度高。這是因為2臺手持機在同一時段內觀測了相同的一組衛星,包含有部分相同的誤差,因此,測量值具有比較高的相關性,經過數據處理,有效地消除和削弱了衛星星歷誤差及衛星鐘差、電離層、對流層對測距的影響,提高了定位精度。
3 手持GPS定位精度及穩定性分析
3.1 高程定位精度的問題
由于手持機進行定位時,因為持有人的身高的區別;進行點位測量時,不可能每次都把手持機放到地面的點位上;應用手持機測量大多數情況下是直接手持,而不是固定到對中桿上;進行點位測量時,測量者手持儀器距地面點的高度并不是固定不變的;結合這些實際問題,從而對于高程的精度就沒有做進一步的研究。
3.2 平面定位精度的問題
據以上數據和圖1可以得出,實測觀測值與其真值比較,X,Y坐標分布比較均勻。但是手持式GPS定位中還存在著明顯的系統誤差,誤差均在1 m以內,如果對所使用的儀器進行誤差模擬來改善系統誤差對單點定位精度的影響,所測得數據可以得到更高的精度。
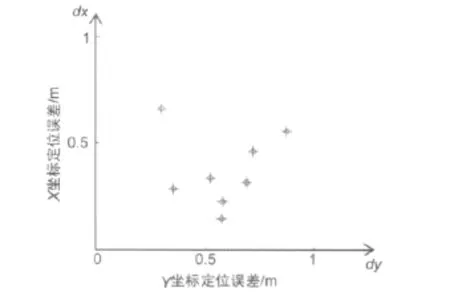
圖1 GPS定位誤差分布圖
觀測值的系統誤差為
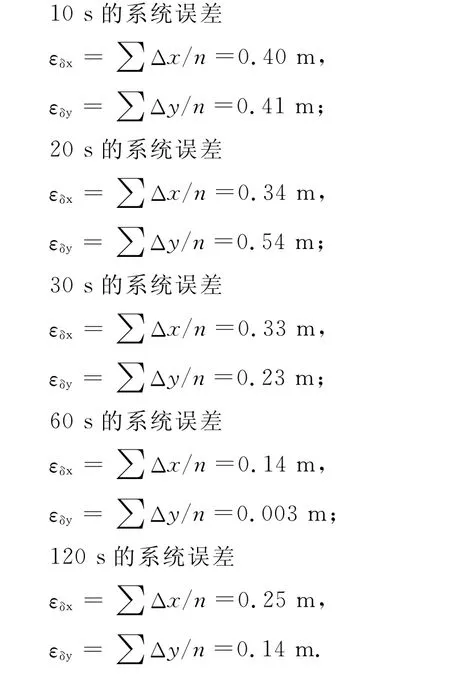
利用上述公式可以得出改正后的殘差如表6所示。
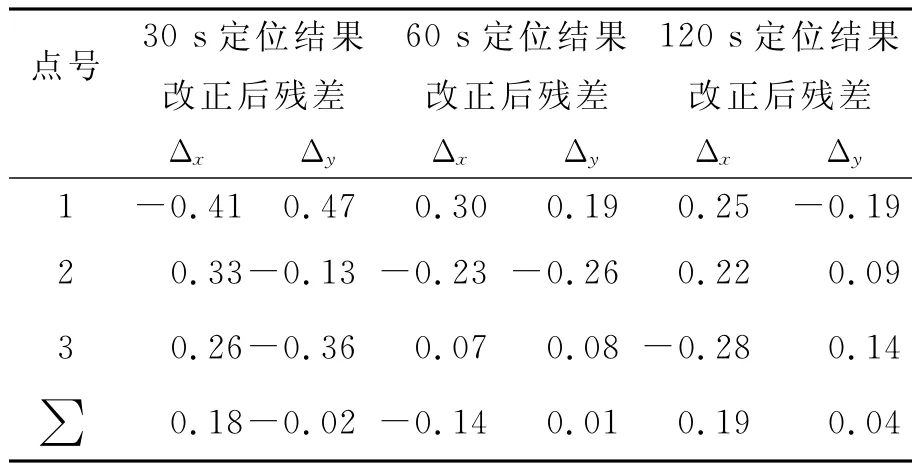
表6 系統誤差改正后的殘差
從表中數據對比分析,當定位時間適當延長以后,定位結果的殘差會比較小,在某些特殊情況下,可能由于人為的操作不當,或者是由于天氣原因,致使某些結果會有反常情況的發生。但是,總體的趨勢還是正確的。也就是說適當的延長定位時間后,會得到精度更高的結果。
利用以上數據對定位后的點位進行處理后,可以得出精度比較高的點位坐標。得到的這些坐標,可能會因為地理位置,大氣層,電離層或者是對流層等的影響從而影響定位的精度。所以,針對某些特定的情況下,得出處理后得到的定位點的精度如表7所示。
從表7的數據分析中可以得出,在不同的定位模式下,也就是說不同的定位時間對定位點的定位精度有較大的影響。根據表中的數據對比,當定位時間延長后,定位精度就會越來越高。在某些精度要求不是很高,可以選擇短時間的定位,這樣可以節省定位時間,提高作業效率;如果要求定位結果的精度相對比較高時,可以延長定位時間來實現。如果要求的精度很高,最好采用GPS接收機進行靜態定位。
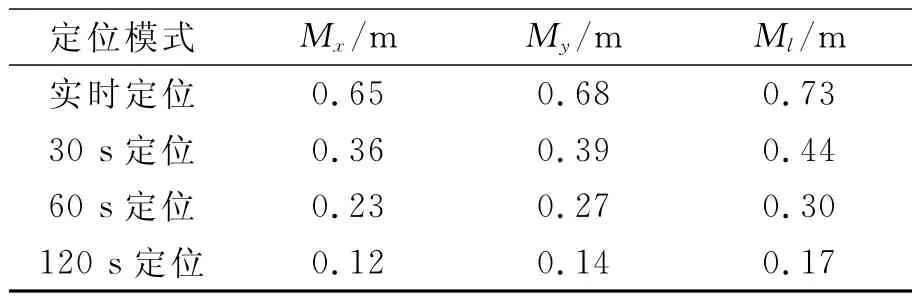
表7 處理后得到的定位點的精度
4 結 論
通過試驗可以得出,不經過數據處理的天寶(型號XH)手持式GPS實時單點定位的水平精度可以控制在亞米級的水平上。但是,在某些地區,如果延長觀測時間至兩分鐘以上,或者手持機所測得數據經過處理之后,單點定位上的水平精度甚至達到半米之內或者更高。
[1]劉大杰,施一民,過靜君.全球定位系統(GPS)的原理與數據處理[M].上海:同濟大學出版社,1996:6-7.
[2]徐紹銓.GPS測量原理及應用[M].武漢:武漢測繪科技大學出版社,2000:1-10.
[3]鄧 鐘.基于手持式GPS野外導航地圖的制作研究[J].閩江學院學報,2008:119-121.
[4]王曉明,高 平.提高手持GPS定位精度的方法研究[J].寧夏工程技術,2009:1-10.
[5]李廣俊.手持式GPS精度分析及工程應用[J].西部探礦工程,2009(7):131-133.
[6]龔佑興.GPS單點定位研究[D].長沙:中南大學,2004:36-56.
[7]周揚眉.GPS精密定位的數學模型、數值算法及可靠性理論[J].武漢:武漢大學學報,2003:6-25.
[8]程鵬飛,蔡艷輝.全球衛星導航系統[M].測繪出版社,2009:122-128.
[9]張麗娜,楊志強.手持式GPS定位誤差的研究[J].工程地球物理學報,2006:478-483.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00