基于RBF-ARX模型的多變量系統(tǒng)非線性預(yù)測(cè)控制
2011-06-21 08:31:34彭繼慎宋鵬劉鑒
電氣傳動(dòng) 2011年8期
關(guān)鍵詞:模型
彭繼慎,宋鵬,劉鑒
(遼寧工程技術(shù)大學(xué) 電氣與控制工程學(xué)院,遼寧 葫蘆島125105)
1 引言
壓鑄機(jī)作為有色金屬鑄件的重要生產(chǎn)裝備,具有十分廣闊的市場(chǎng)前景。隨著制造業(yè)的飛速發(fā)展,對(duì)壓鑄件的質(zhì)量和精度要求越來(lái)越高,壓鑄件既要有尺寸準(zhǔn)確的內(nèi)外腔形狀,又要有良好的力學(xué)性能。生產(chǎn)實(shí)踐表明,壓鑄件充型完好、輪廓清晰,主要取決于壓射速度;壓鑄機(jī)的內(nèi)部質(zhì)量和力學(xué)性能主要取決于增壓效果[1-2]。傳統(tǒng)壓射控制常采用慢壓射、快壓射和增壓3級(jí)順序控制,閥門開度大小固定,調(diào)整困難。之后出現(xiàn)的勻加速壓射、模糊PID控制、變論域模糊控制等方法,都是以輸出反饋構(gòu)成閉環(huán)控制回路,沒(méi)有重視壓射回路中壓射電磁閥和增壓電磁閥的強(qiáng)非線性特性,在實(shí)際應(yīng)用中總體控制精度不高,效果不好。
現(xiàn)有非線性系統(tǒng)建模方法中,分段線性化方法全面描述系統(tǒng)特性要建立一系列局部線性模型,工作量太大且困難;模型參數(shù)在線辨識(shí)計(jì)算量大,參數(shù)收斂困難;單一神經(jīng)網(wǎng)絡(luò)建模需要多個(gè)中心點(diǎn),精度要求高時(shí)參數(shù)求解難度大[3-4]。RBFARX模型是針對(duì)非線性系統(tǒng)的離線建模方法,將徑向基函數(shù)(radial basis function,RBF)神經(jīng)網(wǎng)絡(luò)和有源自回歸(auto-regressive with extra inputs,ARX)模型結(jié)合的全局復(fù)合模型。采用快速收斂的結(jié)構(gòu)化非線性參數(shù)優(yōu)化策略離線辨識(shí)模型參數(shù),可以有效避免在線辨識(shí)建模耗時(shí)過(guò)大等問(wèn)題,且每個(gè)工作點(diǎn)的局部線性化自回歸模型都可通過(guò)全局模型快速計(jì)算得出,為非線性系統(tǒng)建模提供了一條強(qiáng)有效的途徑。本文將RBF-ARX模型應(yīng)用于壓鑄機(jī)多變量壓射過(guò)程的建模,給出了模型參數(shù)的辨識(shí)和優(yōu)化、預(yù)測(cè)控制策略和仿真研究結(jié)果。
2 RBF-ARX模型
2.1 RBF神經(jīng)網(wǎng)絡(luò)
由J.Moody和C.Darken于20世紀(jì)80年代提出的RBF神經(jīng)網(wǎng)絡(luò)是一種3層前饋網(wǎng)絡(luò),其結(jié)構(gòu)圖如圖1所示[5]。輸入層由信號(hào)源節(jié)點(diǎn)組成,隱含層由一組隱含層節(jié)點(diǎn)組成。輸入信號(hào)經(jīng)過(guò)非線性變換傳遞到隱含層,由隱含層節(jié)點(diǎn)的輻射函數(shù)(即基函數(shù))處理,最后由輸出層對(duì)隱含層節(jié)點(diǎn)的輸出作線性組合后輸出。
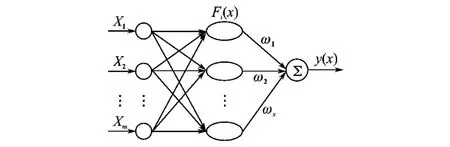
圖1 RBF網(wǎng)絡(luò)結(jié)構(gòu)圖Fig.1 Structure diagram of RBF network
隱含層節(jié)點(diǎn)的輻射函數(shù)在局部對(duì)輸入信號(hào)產(chǎn)生響應(yīng),輸入信號(hào)靠近基函數(shù)的中央范圍時(shí),隱含層節(jié)點(diǎn)將產(chǎn)生較大的輸出,因此RBF網(wǎng)絡(luò)具有局部逼近能力。可以作隱含層輻射作用的函數(shù)有高斯函數(shù)、逆向二次函數(shù)、多二次函數(shù)、薄板樣條函數(shù)等,高斯函數(shù)以其形式簡(jiǎn)單、解析性好得到廣泛使用。
由圖1可得RBF網(wǎng)絡(luò)輸入層到輸出層的表達(dá)式為

式中:ωi,j為第i個(gè)隱含層神經(jīng)元與第j個(gè)輸出層單元的連接權(quán)值;Fi(x)為采用非負(fù)非線性高斯徑向基函數(shù);ci為第i個(gè)基函數(shù)的中心;Zj為第j個(gè)輸出層單元偏置的補(bǔ)償。
求給定輸入下的輸出,必須先確定基函數(shù)中心ci和權(quán)重ωi,j。采用模糊K均值聚類算法來(lái)確定各基函數(shù)的中心ci,將樣本點(diǎn)代入基函數(shù)Fi(x)構(gòu)造n維空間向量F,再代入輸出公式可得

2.2 線性ARX模型
對(duì)于一個(gè)帶誤差項(xiàng)的單輸入信號(hào)u(t)和單輸出y(t)信號(hào)(SISO)過(guò)程,可以表示為如下線性方程形式[6]:

將式(3)簡(jiǎn)明表達(dá),模型方程改寫為
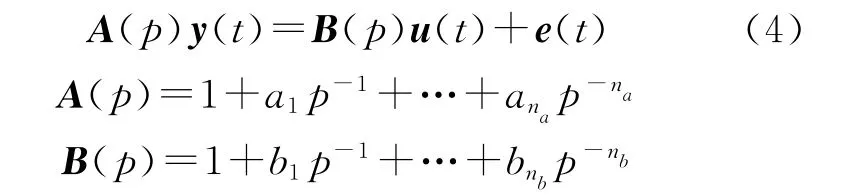
式中:a1,a2,…,ana,b1,b2,…,bnb為常數(shù),分別表示模型輸出變量和輸入變量的參數(shù);u(t),y(t)分別為時(shí)刻t時(shí)的輸入信號(hào)和輸出信號(hào);e(t)為時(shí)刻t時(shí)的擾動(dòng)(或稱為殘差)。
式(4)稱為 ARX模型,其中A(p)y(t)為自回歸(AR)部分,B(p)u(t)為外部輸入X 部分。
3 RBF-ARX模型預(yù)測(cè)控制算法的實(shí)現(xiàn)
3.1 RBF-ARX預(yù)測(cè)控制模型結(jié)構(gòu)
基于RBF-ARX的預(yù)測(cè)控制算法是以RBFARX模型為預(yù)測(cè)模型,用閉環(huán)輸出預(yù)測(cè)構(gòu)成的一種預(yù)測(cè)控制算法[7],適合于復(fù)雜非線性系統(tǒng),算法結(jié)構(gòu)圖如圖2所示。
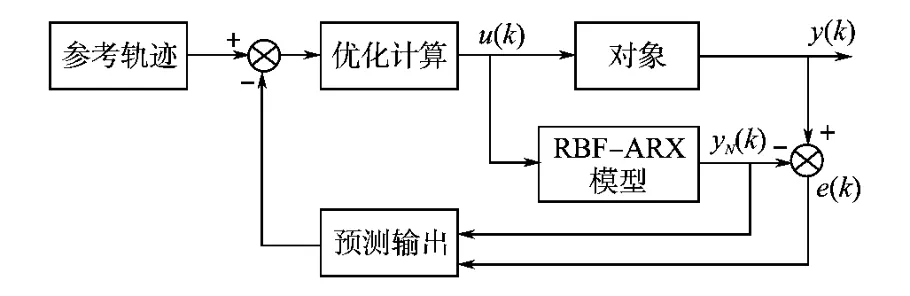
圖2 RBF-ARX模型預(yù)測(cè)控制算法結(jié)構(gòu)框圖Fig.2 Structure diagram of predict control using RBF-ARX model
圖2中預(yù)測(cè)輸出是由RBF-ARX模型根據(jù)已知的輸入輸出信號(hào)預(yù)測(cè)對(duì)象未來(lái)N步的動(dòng)態(tài)變化趨勢(shì);優(yōu)化計(jì)算是計(jì)算使控制器的性能指標(biāo)函數(shù)最小的最優(yōu)輸出。控制器根據(jù)輸出預(yù)測(cè),經(jīng)誤差反饋校正,使系統(tǒng)未來(lái)一段時(shí)間內(nèi)輸出預(yù)測(cè)值和參考軌跡之間的誤差最小,將最優(yōu)控制輸出施加到控制對(duì)象上。
3.2 RBF-ARX模型構(gòu)建
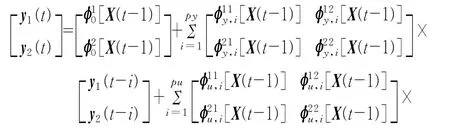
建立壓鑄機(jī)壓射回路兩輸入兩輸出系統(tǒng)(u1,u2是壓射電磁閥和增壓電磁閥控制信號(hào),y1,y2為壓射速度、壓力)的RBF-ARX模型如下:
3.3 RBF-ARX模型參數(shù)辨識(shí)和優(yōu)化
RBF-ARX模型參數(shù)可用融合了列維布格-奈奎爾特法和線性最小二乘法的結(jié)構(gòu)化非線性參數(shù)優(yōu)化方法離線辨識(shí)估計(jì)[8]。這種方法的操作步驟如下:
1)參數(shù)歸類。將式(2)~式(5)的參數(shù)分成線性參數(shù)和非線性參數(shù),
可將式(5)模型改寫為

2)模型階次確定。按照經(jīng)驗(yàn)選定m為2,根據(jù)最小信息準(zhǔn)則使AIC最小循環(huán)確定pu,py,計(jì)算公式為

式中:V為損失函數(shù),此處取標(biāo)準(zhǔn)方差的平方;N為辨識(shí)數(shù)據(jù)的長(zhǎng)度,d為線性參數(shù)φL和非線性參數(shù)φNL的個(gè)數(shù)總和。
在兩輸入兩輸出系統(tǒng)下,d=(m+1)(2pu+2py+1)+8m,計(jì)算出AIC最小情況下m=2,pu=6,py=4。
式中:i=τ+1,τ+2,…,M,τ為模型最大延遲時(shí)間,M為歷史數(shù)據(jù)個(gè)數(shù)。
4)參數(shù)優(yōu)化。定義目標(biāo)函數(shù) Ψ(φNL,φL)=是模型的向前一步預(yù)測(cè)值與采樣數(shù)據(jù)的差值。參數(shù)優(yōu)化就是計(jì)算



3.4 多步向前輸出預(yù)測(cè)
將式(5)所述模型轉(zhuǎn)換成矩陣形式:

則可得到RBF-ARX模型下N步向前的預(yù)測(cè)輸出

E′t,N,F(xiàn)t,N,G′t,N,Ht,N(q-1)是下述兩方程的解:
令N1為預(yù)測(cè)時(shí)域,Nu為控制時(shí)域,期望輸出設(shè)定序列
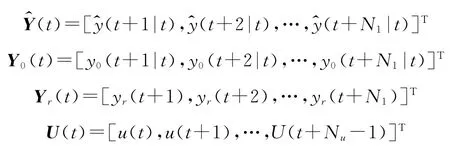
可將式(9)進(jìn)一步簡(jiǎn)寫為

定義系統(tǒng)的優(yōu)化目標(biāo)函數(shù)如下
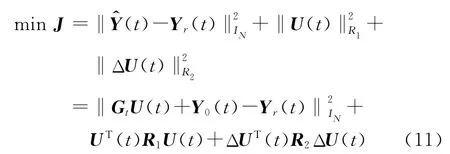
實(shí)際應(yīng)用中不考慮輸出限制,只使用輸入限制就可以避免二次規(guī)劃,直接得到控制信號(hào)U(t)的表達(dá)式

4 仿真研究
以力勁DCC400M型鎂合金壓鑄機(jī)壓射回路為仿真對(duì)象,為提高分析和仿真效率去掉一些輔助回路和元件,如圖3所示。壓射回路的工作原理是:液壓泵將工作介質(zhì)不斷送入主蓄能器和增壓蓄能器儲(chǔ)存能量,兩路輸入控制信號(hào)分別作用在壓射電磁閥和泄壓閥上,改變液壓缸內(nèi)工作介質(zhì)的流量從而控制液壓缸閥桿的壓射速度和壓力。仿真中對(duì)液壓泵疊加一定幅度的正弦信號(hào)來(lái)模擬液壓泵的脈動(dòng)特性,對(duì)比例換向閥疊加一定幅度的偽隨機(jī)噪聲來(lái)模擬噪聲。
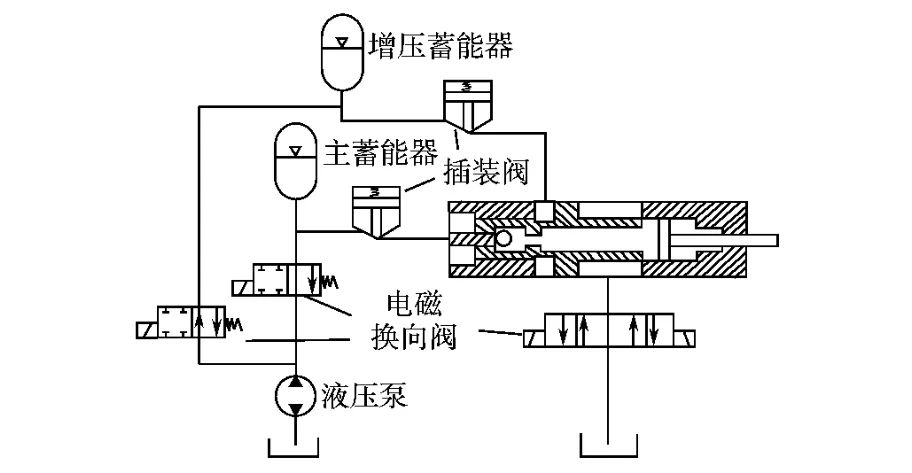
圖3 壓鑄機(jī)壓射回路示意圖Fig.3 Schematic diagram of the die-casting machine′s injection loop
壓鑄機(jī)壓射過(guò)程中理想速度曲線如圖4所示,在壓射前期速度應(yīng)盡量低,有利于排出壓室內(nèi)的空氣;壓射中期速度快速增大,高速推動(dòng)液態(tài)金屬充入鑄型,在金屬溶液開始凝固之前其流動(dòng)性和壓力傳遞性能較好,所以充填時(shí)間越短對(duì)鑄件充型完整越有利;壓射后期速度下降到零,給液態(tài)金屬合金施加穩(wěn)定的高壓[10-11]。
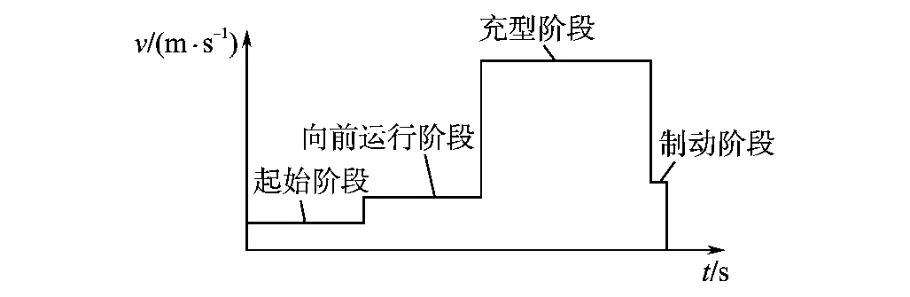
圖4 理想壓射速度曲線Fig.4 Ideal injection speed curve
依據(jù)第3節(jié)中給出的雙輸入雙輸出系統(tǒng)建模、參數(shù)辨識(shí)和優(yōu)化及預(yù)測(cè)控制算法實(shí)現(xiàn)過(guò)程,進(jìn)行速度設(shè)定值跟蹤效果仿真研究,控制效果如圖5所示。
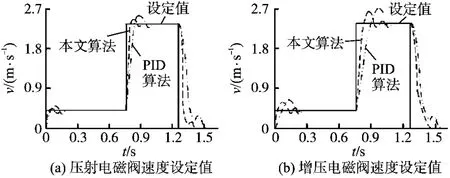
圖5 跟蹤效果對(duì)比Fig.5 Tracking performances comparision
從圖5a中可以看出,對(duì)于非線性特性一般的壓射電磁閥,速度上升沿跳變時(shí)本文算法和PID算法都能很快響應(yīng),將速度穩(wěn)定在設(shè)定值,本文算法稍微提前一些。在下降沿跳變時(shí),PID算法響應(yīng)較慢,比本文算法滯后。
從圖5b中可以看出,對(duì)于強(qiáng)非線性的增壓電磁閥,速度上升沿跳變時(shí)2種算法均不如對(duì)壓射電磁閥的控制效果好,但是仍可以看出本文算法比PID算法超調(diào)量小,響應(yīng)速度快。
綜上所述,基于RBF-ARX模型的非線性預(yù)測(cè)控制算法比傳統(tǒng)PID算法在強(qiáng)非線性多變量系統(tǒng)控制中具有更好的效果。
5 結(jié)論
本文以壓鑄機(jī)多變量壓射過(guò)程非線性系統(tǒng)為研究對(duì)象,采用基于RBF-ARX模型的離線建模方法,建立系統(tǒng)的全局非線性動(dòng)態(tài)模型。首先介紹了RBF網(wǎng)絡(luò)和線性ARX模型的基礎(chǔ)知識(shí),采用結(jié)構(gòu)化非線性參數(shù)優(yōu)化方法離線辨識(shí)估計(jì)模型參數(shù),結(jié)合預(yù)測(cè)控制理論確定了系統(tǒng)結(jié)構(gòu)和多步向前預(yù)測(cè)輸出。比較了基于RBF-ARX模型的非線性預(yù)測(cè)控制算法與傳統(tǒng)PID算法的壓射速度設(shè)定值跟蹤效果,驗(yàn)證了此方法的有效性,進(jìn)一步說(shuō)明了RBF-ARX模型在非線性系統(tǒng)建模中的優(yōu)越性。
[1]彭繼慎.壓鑄機(jī)控制技術(shù)[M].北京:機(jī)械工業(yè)出版社,2006.
[2]郗志剛,柯有權(quán).冷室壓鑄機(jī)壓射速度的勻加速控制[J].鑄造技術(shù),2006,27(6):562-564.
[3]侯海良,彭輝.一種新的ARX模型在磁懸浮系統(tǒng)建模中的應(yīng)用[J].計(jì)算機(jī)工程與應(yīng)用,2007,43(29):196-213.
[4]孫志兵,戴金海.基于全調(diào)節(jié)RBF神經(jīng)網(wǎng)絡(luò)的自適應(yīng)飛行控制器[J].計(jì)算機(jī)仿真,2007,24(9):137-140.
[5]Simon Haykin.神經(jīng)網(wǎng)絡(luò)原理[M].葉世偉,史忠植,譯.北京:機(jī)械工業(yè)出版社,2004.
[6]Lennart Ljung.System Identification:Theory for the User(2nd Edition)[M].Beijing,China:Tsinghua University Press,Prentice Hall PTR,2002.
[7]舒迪前.預(yù)測(cè)控制系統(tǒng)及其應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2001.
[8]Hui Peng,Tohru Ozaki,Valerie Haggan-ozaki,et al.A Parameter Optimization Method for Radial Basis Function Type Models[C]∥IEEE Transactions on Neural Networks,2003:432-438.
[9]Marquart D.An Algorithm for Least-squares Estimation of Nonlinear Parameter[J].SIAM J Appl.Math,1963,11:431-441.
[10]黃志祿.壓射速度對(duì)壓鑄件質(zhì)量的影響[J].特種鑄造及有色合金,2007(S1):225.
[11]王益志,潘憲曾,趙士忠,等.壓鑄機(jī)實(shí)時(shí)壓射控制系統(tǒng)對(duì)鑄件質(zhì)量的影響[J].特種鑄造及有色合金,2001(5):43-45.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
