基于自適應(yīng)模糊控制的飛機(jī)自動著陸系統(tǒng)
2011-06-21 08:31:34高冰李鵬張學(xué)焦黎明陳艷
電氣傳動 2011年8期
高冰,李鵬,張學(xué),焦黎明,陳艷
(1.中國民航大學(xué) 工程技術(shù)訓(xùn)練中心,天津300300;2.中國核電工程有限公司,河北 石家莊050000)
1 引言
飛機(jī)的進(jìn)近著陸是整個飛行過程中事故多發(fā)的階段,隨著現(xiàn)代飛機(jī)速度的提高,體積的增大,單純依靠目視來完成著陸越來越困難,尤其對于現(xiàn)在的大型民用機(jī)而言,要想飛機(jī)安全、準(zhǔn)確地完成著陸任務(wù),必須要依靠機(jī)場安裝的著陸信號引導(dǎo)設(shè)備,利用無線電、微波等導(dǎo)航技術(shù)向飛機(jī)發(fā)送著陸引導(dǎo)信息,使飛機(jī)自動駕駛儀跟蹤引導(dǎo)信號指示。
對于飛機(jī)飛行控制而言,主要分為橫向和縱向通道的控制,橫向控制主要用于著陸引導(dǎo)信號的截獲,而截獲后自動駕駛儀則主要依靠對縱向通道的控制來跟蹤著陸系統(tǒng)提供的下滑道。在自動著陸系統(tǒng)中運用不同的控制算法其控制效果也是不同的,早先將PID控制引入到自動著陸當(dāng)中,雖然PID控制的精度比較高,但是動態(tài)性能難以滿足要求,后來隨著智能控制的興起,自動著陸系統(tǒng)開始引入更好的智能算法,像模糊控制和神經(jīng)網(wǎng)絡(luò)控制等,單純的運用模糊控制算法雖然動態(tài)性和抗干擾性較好,但是控制精度較差。神經(jīng)網(wǎng)絡(luò)控制由于網(wǎng)絡(luò)訓(xùn)練問題不能達(dá)到響應(yīng)的快速性,而如果利用多種智能算法進(jìn)行復(fù)合控制的話,那么系統(tǒng)響應(yīng)的動態(tài)性能必然會受到影響[1]。基于上述分析,本文利用自適應(yīng)模糊算法對飛機(jī)著陸過程中的下降、改平進(jìn)行控制,通過調(diào)整量化因子和比例因子實現(xiàn)模糊論域的自適應(yīng)改變,從而提高控制精度[2],實現(xiàn)良好的動態(tài)性能。
2 自動著陸控制系統(tǒng)
目前飛機(jī)的飛行操縱系統(tǒng)主要采用電傳操作系統(tǒng),針對縱向控制而言,飛行員或者飛行管理計算機(jī)通過電信號傳輸給飛行控制計算機(jī),飛行控制計算機(jī)則根據(jù)指令輸入驅(qū)動伺服作動器進(jìn)而控制升降舵或者水平安定面從而完成飛機(jī)縱向的控制。
飛機(jī)縱向運動的微分方程表達(dá)式為
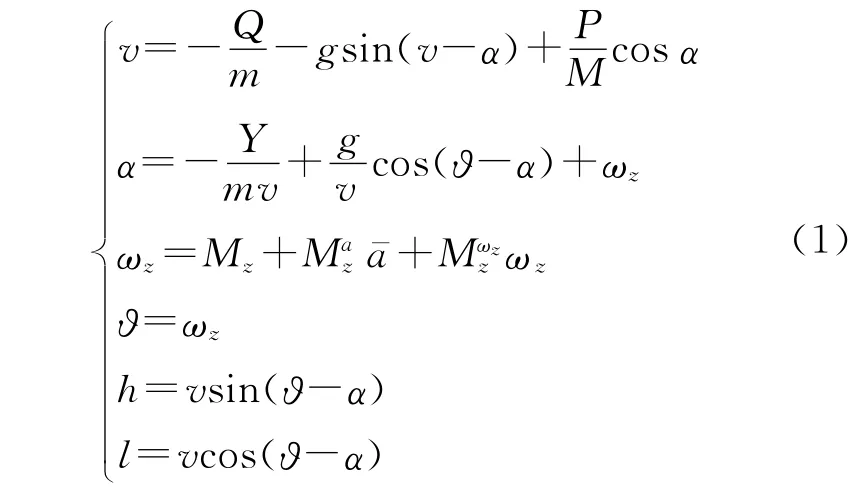
式中:P為發(fā)動機(jī)推力;v為飛行速度;α為迎角;ωz為俯仰角速度;?為俯仰角;h為飛行高度;l為縱向位移;Q為阻力;M為縱向力矩。
系統(tǒng)的狀態(tài)變量為式(1)中各參數(shù)變量,控制量為升降舵的偏轉(zhuǎn)量和發(fā)動機(jī)油門桿角度。根據(jù)精確線性反饋化理論,上述非線性微分方程在滿足相對階以及內(nèi)動態(tài)子系統(tǒng)穩(wěn)定2個條件下完全可以等效為線性系統(tǒng)[3-4]。
本控制系統(tǒng)研究是基于飛機(jī)在進(jìn)近下降,改平以及著陸這幾個階段進(jìn)行,是以對準(zhǔn)航向道后為起始點進(jìn)行控制的[5],飛機(jī)可以只通過升降舵的偏轉(zhuǎn)來改變飛行高度,因此本文研究的控制系統(tǒng)結(jié)構(gòu)圖如圖1所示。

圖1 縱向控制結(jié)構(gòu)圖Fig.1 Structure of longitudinal control
整個縱向控制系統(tǒng)可以分為高度控制回路和姿態(tài)控制回路,姿態(tài)控制回路又分為俯仰角回路和俯仰角速率回路。
3 自適應(yīng)模糊控制器的設(shè)計
自適應(yīng)模糊控制算法通常有兩種:一是模糊規(guī)則的在線自調(diào)整算法;二是變論域的模糊控制算法。
變論域方法實現(xiàn)既可以將輸入輸出論域每個點都乘以收縮因子,也可以通過調(diào)整量化因子來改變目標(biāo)量相對于模糊論域的程度。兩者都可以更多的激活其所屬的模糊規(guī)則,間接實現(xiàn)了在線的規(guī)則調(diào)整。由于前者處理較困難,所以本文通過引入論域的收縮因子函數(shù),對量化因子進(jìn)行在線自調(diào)整,利用模糊規(guī)則配合量化因子的調(diào)整對比例因子進(jìn)行推理判斷,實現(xiàn)了自動著陸系統(tǒng)的自適應(yīng)模糊控制。自適應(yīng)模糊控制結(jié)構(gòu)如圖2所示。
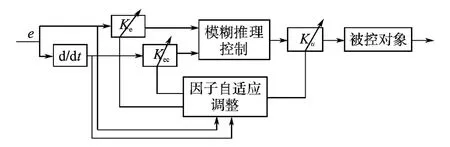
圖2 自適應(yīng)模糊控制結(jié)構(gòu)圖Fig.2 Structure of adaptive fuzzy control
3.1 模糊控制器
根據(jù)飛行控制計算機(jī)在飛機(jī)進(jìn)近階段對俯仰姿態(tài)的控制原理,當(dāng)高度差較大并且仍在偏離目標(biāo)時,提高水平安定面傾斜角度,當(dāng)高度差較小,或者有一定的高度差但誤差有減小趨勢時,保持水平安定面的位置。因此,本文采用二維的模糊控制系統(tǒng),模糊推理輸入為誤差e以及誤差變化率ec,其論域分別為E和Ec,輸出論域為C,所有的語言變量都選取為7個模糊子集即[NB,NM,NS,ZO,PS,PM,PB]。輸入與輸出均選用三角形隸屬度函數(shù),為了提高控制器性能,需要擴(kuò)大誤差區(qū)的隸屬度函數(shù)范圍,同時縮小小誤差區(qū)的隸屬度函數(shù)范圍,因此引入符號函數(shù),隸屬度函數(shù)如圖3所示。


圖3 隸屬度函數(shù)Fig.3 Membership function
控制器的模糊規(guī)則如表1所示。
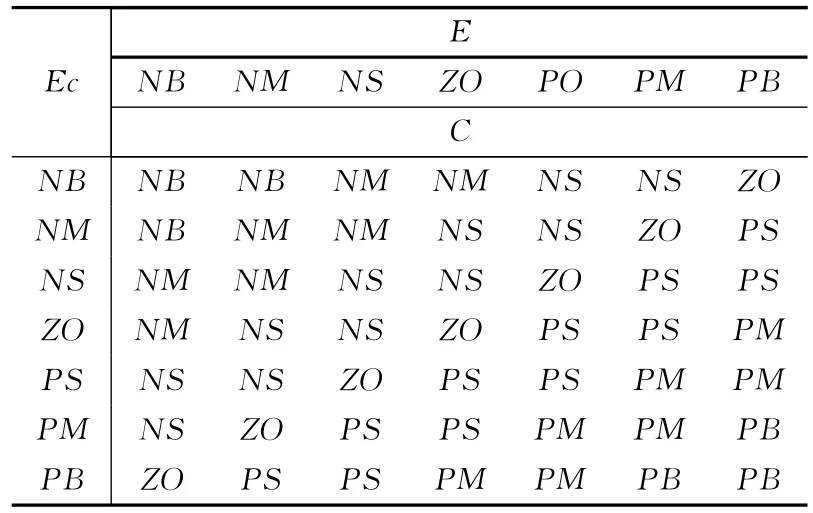
表1 模糊規(guī)則表Tab.1 Fuzzy rule
3.2 模糊控制器的優(yōu)化設(shè)計
3.2.1 量化因子的在線調(diào)整
根據(jù)Ke×e=E,量化因子Ke可以將實際誤差信號映射到模糊推理中的輸入論域E當(dāng)中,然后由模糊規(guī)則去推理判斷輸出,然而正是由于量化因子的存在,使得模糊推理系統(tǒng)在小誤差的時候,不能激活模糊規(guī)則或者很少的模糊規(guī)則,導(dǎo)致系統(tǒng)調(diào)節(jié)出現(xiàn)死區(qū),影響了控制精度。為了解決這個問題,應(yīng)該對量化因子Ke和Kec進(jìn)行在線調(diào)整。
當(dāng)Ke增大時,相當(dāng)于論域被縮小,對于誤差信號,被激活的模糊規(guī)則也就相應(yīng)增加,響應(yīng)速度加快,如果過大,會導(dǎo)致系統(tǒng)產(chǎn)生超調(diào)現(xiàn)象,甚至不穩(wěn)定。Ke減小時,系統(tǒng)快速性降低,調(diào)節(jié)惰性變大,降低控制精度。Kec也是如此,當(dāng)Ke增大時,系統(tǒng)變化抑制能力增強(qiáng),Kec過大時,則調(diào)節(jié)時間變長,過小時,則上升速率增大導(dǎo)致超調(diào)甚至不穩(wěn)[6]。
根據(jù)上述分析,對于量化因子Ke的調(diào)整應(yīng)該按照利用當(dāng)誤差很大時,減小Ke,保證其進(jìn)入論域范圍并被識別為大誤差,當(dāng)誤差很小時,適當(dāng)增大Ke,提高分辨率,增加可利用的模糊規(guī)則[7]。與此同時,應(yīng)使Ke調(diào)整連續(xù)。
根據(jù)變論域理論中收縮因子α(x)將初始論域[-E,E]變換為[-α(x)E,α(x)E],由 Δα與Δx成正比可知其增量關(guān)系式:

可得微分方程

所以可知

式中,α(x)在0~1之間變化,k,m 為常系數(shù),k在一定程度上反映論域伸縮的靈敏度,k值越大,伸縮越快,反之伸縮越慢。m為0~1之間的常數(shù)。按照伸縮調(diào)整后的論域E′和模糊系統(tǒng)設(shè)定的論域E之間的關(guān)系:

按照論域伸縮與量化因子伸縮的反比關(guān)系可以推得:

因此當(dāng)e大于規(guī)定論域E時,根據(jù)Ke×e=E,輸出Ke=E/e。
當(dāng)e小于等于規(guī)定論域E時,輸出Ke=1/α(e)。
對于Kec的調(diào)整可以基于閥值切換進(jìn)行調(diào)整:
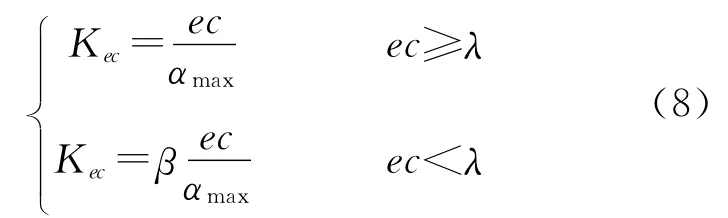
當(dāng)變化率ec大于閥值常數(shù)λ時,根據(jù)最大升降速率αmax=10m/s確定較小的Kec,當(dāng)升降速率小于λ時,增加Kec,β為大于1的常數(shù)。
3.2.2 比例因子的在線調(diào)整
比例因子Ku是將論域中推理輸出控制量轉(zhuǎn)化為實際控制量的系數(shù),它決定著系統(tǒng)控制量的大小,Ku增大時,相當(dāng)于系統(tǒng)放大倍數(shù)增加,加快了響應(yīng)速度,當(dāng)Ku過大時,會產(chǎn)生超調(diào)乃至振蕩,過小時,則快速性變差[7]。
結(jié)合量化因子的調(diào)整,對Ku的設(shè)計原則如下。
當(dāng)e×ec≤0,且誤差超出論域時,Ku盡可能大些,保證響應(yīng)速度,而小于論域時,為了避免超調(diào),逐漸減小Ku。
當(dāng)e×ec>0時,為了快速收斂,增大Ku使系統(tǒng)快速收斂。
因此,引入更新因子γ,使控制器實際輸出:U實際=(γ·Ku)·U論域,γ∈(0,1]。利用模糊推理建立γ的模糊規(guī)則,γ分為5個語言變量,其模糊子集為[很小,小,中,大,很大],其符號為[VS,S,M,B,VB],隸屬度函數(shù)采用對稱、均勻分布的三角形隸屬度函數(shù)。模糊規(guī)則如表2所示。
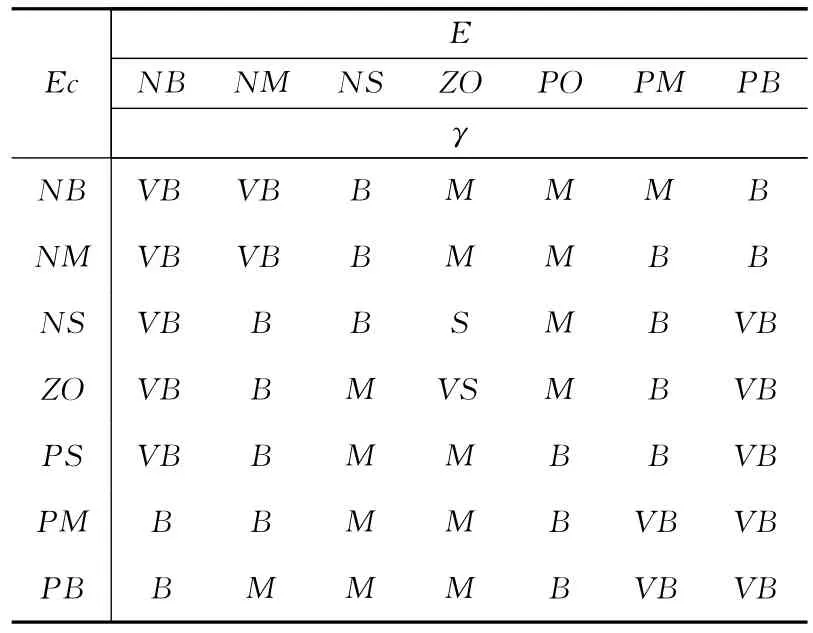
表2 γ的模糊規(guī)則表Tab.2 Fuzzy rule of γ
4 系統(tǒng)仿真
本文是在Simulink環(huán)境中建立的控制系統(tǒng)模型,利用模糊工具箱和S函數(shù)對系統(tǒng)進(jìn)行仿真研究。飛機(jī)自動著陸系統(tǒng)縱向控制的數(shù)學(xué)模型為

式(5)中m,k分別為0.8,2。Kec切換閥值λ=5,β=1.5,E,Ec以及C 的論域值分別為50,15和20。利用自適應(yīng)模糊算法控制飛機(jī)自動著陸軌跡跟蹤以及軌跡誤差的仿真圖如圖4和圖5所示。
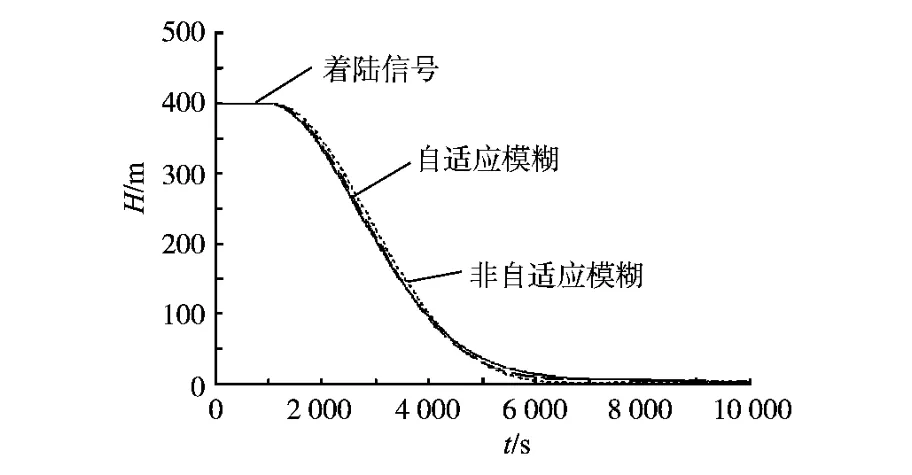
圖4 自動著陸軌跡仿真Fig.4 Simulation of automatic landing track
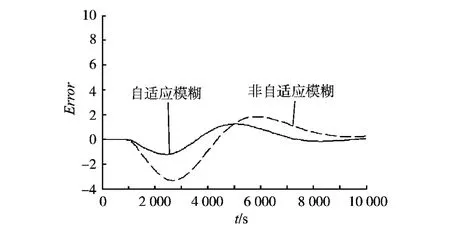
圖5 軌跡誤差仿真Fig.5 Simulation of track error
根據(jù)737-300模擬機(jī)在進(jìn)近著陸過程中飛機(jī)高度對應(yīng)指點信標(biāo)的實測數(shù)據(jù),飛機(jī)在外指點信標(biāo)上方400m高度截獲下滑道,到達(dá)中指點信標(biāo)上方的高度為50m,而到達(dá)內(nèi)指點信標(biāo)上方時約為30m,外指點信標(biāo)與內(nèi)指點信標(biāo)之間的距離大約為6 000m。仿真圖4中,3個高度所對應(yīng)的指點信標(biāo)的縱向位移與實驗情況基本相符。在圖5中,自適應(yīng)模糊算法控制下的軌跡誤差最大不超過1m,相比較普通模糊算法有了明顯的提高。從圖4、圖5中可以清楚的看出,自適應(yīng)模糊控制算法在著陸軌跡的跟蹤上更加精確,尤其在飛機(jī)改平階段能夠及時響應(yīng),具有良好的動態(tài)性能。
5 結(jié)論
本文通過變論域理論中的收縮因子在線調(diào)整模糊系統(tǒng)的量化因子,同時結(jié)合專家經(jīng)驗利用模糊規(guī)則對比例因子進(jìn)行聯(lián)合調(diào)整,實現(xiàn)了變論域自適應(yīng)模糊控制,仿真結(jié)果證明基于該算法的飛機(jī)自動著陸控制系統(tǒng)具有良好的動態(tài)性能,有效地提高了著陸精度。
[1]Juang Jih-Gau,Chang Hao-Hsiang.Application of Time Delay Neural Network to Automatic Landing Control[C]∥Proceedings of the 2002IEEE International Conference on Control Applications,2002,12:150-155.
[2]李洪興.Fuzzy控制的本質(zhì)與一類高精度Fuzzy控制器的設(shè)計[J].控制理論與應(yīng)用,1997,14(6):868-872.
[3]馮江,王曉燕,趙書玲,等.飛機(jī)自動著陸控制系統(tǒng)中輸入/輸出反饋線性化[J].武器裝備自動化,2004,25(2):10-12.
[4]Amit Manocha,Abhishek Sharma.Three Axis Aircraft Autopilot Control Using Genetic Algorithms:an Experimental Study[C]∥2009IEEE International Advance Computing Conference,2009:171-174.
[5]鄒新生,李春文.在復(fù)雜大氣條件下的飛機(jī)自動著陸控制器設(shè)計與仿真[J].系統(tǒng)仿真學(xué)報,2006,15(5):1286-1288.
[6]梁燕華,金鴻章,李東松.基于修正因子模糊PID控制在升力鰭系統(tǒng)中的應(yīng)用[J].控制與決策,2008,23(10):1139-1144.
[7]鄭宏,徐紅兵,朱貴平.變論域自適應(yīng)模糊控制在航機(jī)發(fā)電中的應(yīng)用[J].控制理論與應(yīng)用,2008,25(2):253-256.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
