新型無刷直流電機直接轉矩控制
2011-06-21 08:31:34王超黃運生韓華
電氣傳動 2011年8期
王超,黃運生,韓華
(中南大學 信息科學與工程學院,湖南 長沙410083)
近幾年來,有學者將直接轉矩控制引入無刷直流電機控制[1]。將DTC用于無刷直流電機時,不但可以略去其磁鏈觀測部分[2-3],簡化控制系統的結構,還可以利用其轉矩控制的高動態性,有效抑制轉矩脈動。
文獻[2]實現了無刷直流電機直接轉矩控制,但其采用6分區的電壓矢量空間。由于分區較寬,每次電壓矢量切換所調節的磁通角過大,導致轉矩控制不夠平穩,未能發揮直接轉矩控制的優良性能。針對無刷直流電機直接轉矩控制中轉矩觀測的問題,文獻[4]采用公式法計算轉矩,需預知磁鏈,轉子位置及相電流,且公式中包含微分項,計算量大,計算精度低。文獻[3]和文獻[5]利用反電動勢形狀函數法進行電磁轉矩計算,雖然簡單,但其基于反電動勢波形為理想梯形波的假設基礎上,因此誤差較大。
本文針對直接轉矩控制在無刷直流電機系統中的應用,作了以下2方面工作:1)提出電壓矢量空間12扇區劃分的直接轉矩控制策略;2)針對轉矩觀測問題,構建了以相電流、相電壓為輸入,電磁轉矩為輸出的小波神經網絡(WNN),實現轉矩的預測反饋。仿真與實驗結果表明:基于以上方法的無刷直流電機控制,轉矩響應快,轉矩脈動小。
1 無刷直流電機DTC控制
電機的電磁轉矩可表示為

式中:km為轉矩系數;|Ψs|為定子磁鏈空間矢量幅值;|Ψr|為轉子磁鏈空間矢量幅值;θ為定轉子磁鏈之間的夾角,即磁通角。由此可知,轉矩的大小與定子磁鏈幅值、轉子磁鏈幅值和磁通角成正比。無刷直流電機的轉子磁鏈幅值由永磁體產生,其大小近似恒定。因此,只要選擇適當的電壓空間矢量,控制定子磁鏈的旋轉,進而改變磁通角大小,便能達到控制轉矩的目的。
1.1 電壓空間矢量
本文用六位二進制數來表示電壓空間矢量,每一位二進制數代表1個功率管的開關狀態,0表示關斷,1表示導通。如100001代表功率管1和6開通,其余管關斷,即A相上橋管,C相下橋管導通。100101代表功率管1,4,6開通,其余管關斷,即A相上橋管,B,C相下橋管導通。
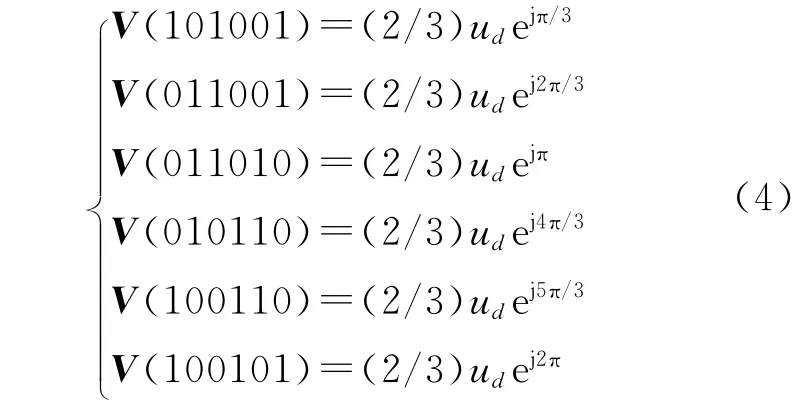
對電機進行分析與控制時,通常引入Park坐標變換,將三相相電壓變換為Park復平面電壓矢量。若取三相定子坐標系中的a軸與Park矢量復平面的α軸重合,電壓矢量us為
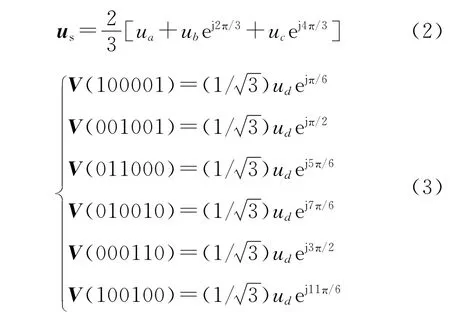
目前無刷直流電機直接轉矩控制主要采用二二導通方式或三三導通方式,二相導通方式時,做理想化處理,求得兩相導通,關斷相電壓為零時的空間電壓矢量。按式(2)計算出6個非零矢量如式(3)所示。三相導通時,按式(2)求得6個非零矢量如下式:
二二導通方式或三三導通方式對應的電壓矢量空間均為6扇區劃分,每次電壓矢量切換所調節的磁通角過大,導致轉矩調節不夠平穩,轉矩波動大。基于空間12扇區劃分的比基于6扇區劃分的無刷直流電機直接轉矩控制,能夠更有效地減小電機穩態轉矩脈動[6]。本文為構造12扇區劃分的電壓矢量空間,采用二三相混合導通策略。
將二二導通及三三導通的12個非零電壓空間矢量融合在一起,形成12扇區劃分的電壓空間矢量,如圖1所示。
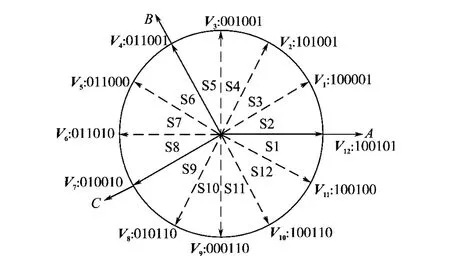
圖1 無刷直流電機12扇區電壓矢量空間Fig.1 Voltage vector space based on twelve sectors division of BLDCM
1.2 無刷電機DTC
本文構建無刷直流電機速度/轉矩雙閉環控制系統,如圖2所示。速度控制器輸出經過限幅后為轉矩給定值,與轉矩反饋值相減后得到轉矩誤差,轉矩誤差與轉矩誤差變化率同時輸入轉矩控制器,轉矩控制器輸出結合位置信號選擇合適的電壓空間矢量,達到調節磁通角,進而調節電磁轉矩的目的。

圖2 無刷直流電機直接轉矩控制框圖Fig.2 The framework of BLDCM DTC
當給定轉矩Tr大于實際轉矩Tf較多,且轉矩誤差變化率dΔT/dt大于零時,轉矩控制器輸出2值,表示應較大幅度增加轉矩,這樣可以加快轉矩響應;當給定轉矩Tr大于實際轉矩Tf,且轉矩誤差變化率dΔT/dt小于零時,轉矩控制器輸出1值,表示正常增加轉矩,保持轉矩調節的平穩性;當給定轉矩Tr小于實際轉矩Tf,且轉矩誤差變化率dΔT/dt大于零時轉矩控制器輸出0值,表示正常減小轉矩;當給定轉矩Tr小于實際轉矩Tf,且轉矩誤差變化率dΔT/dt小于零時轉矩控制器輸出-1值,表示較大幅度減小轉矩,即允許一定的制動轉矩,來限制轉矩脈動。電壓空間矢量選擇如表1所示。
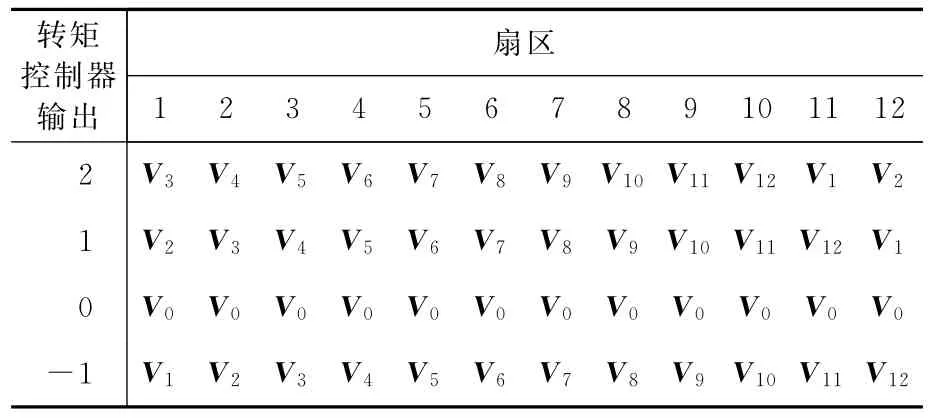
表1 轉矩控制器輸出與開關表Tab.1 Switch table and torque controller_
2 小波神經網絡預測轉矩
2.1 小波網絡
將小波函數作為基函數構造神經網絡形成小波網絡,小波網絡將小波變換良好的時頻局域化特性和神經網絡的自學習功能相結合,具有較強的逼近能力和容錯能力[7]。
由文獻[5]中式(15)可知,電磁轉矩與反電勢和相電流間存在對應關系,而反電勢與相電壓之間又存在對應關系,因此,電磁轉矩與相電壓相電流間存在映射關系。利用神經網絡強大的非線性映射功能,本文構造了一個如圖3所示的小波神經網絡來實現電磁轉矩預測。
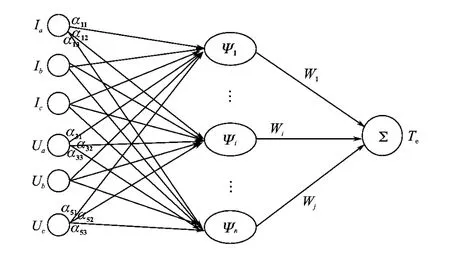
圖3 小波網絡結構Fig.3 The structure of WNN
墨西哥帽函數在時間域和頻率域都有很好的局部化,網絡選用墨西哥帽狀小波為隱層函數,墨西哥帽狀小波:

則6輸入單輸出小波網絡的輸出為

式中:xi為輸入層第i個節點的輸入;αij為輸入層第i個節點到隱含層第j個節點之間的權值;bj為隱含層第j個節點的平移系數;aj為隱含層第j個節點的伸縮系數;Ψ(x)為隱含層激勵函數(小波函數);wj為第j個隱層節點到輸出的權值。
2.2 遺傳算法
網絡訓練中存在的最大問題,莫過于迭代過程中收斂于局部極小點。遺傳算法是一種模仿自然界生物進化思想而得出的一種自適應啟發式全局搜索算法,能使問題逼近全局最優解,且具有較強的魯棒性[7]。本文采用遺傳算法對小波神經網絡進行離線訓練,確定小波神經網絡的結構與參數,使網絡目標函數E為最小。

式中:P為輸入樣本個數;Ts(t)為期望網絡輸出;T(t)為實際網絡輸出。
通過運行基于DSP的無刷電機控制系統提取樣本數據。訓練樣本對小波神經網絡的辨識能力是至關重要的,為了讓網絡更好地逼近實際系統,可以調節電機的轉速,增加電機負載,使運行狀態不斷改變,最大限度地覆蓋電機運行范圍。
遺傳算法訓練小波網絡流程如圖4所示。適應度為f=1/(1+E)。
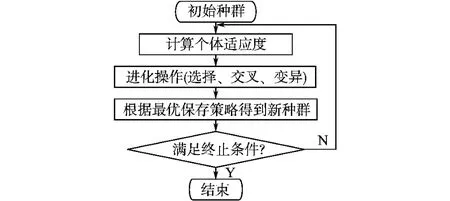
圖4 遺傳算法訓練小波網絡流程圖Fig.4 The training procedure for WNN using genetic algorithm
2.3 小波網絡仿真結果
實驗過程中,將小波網絡參數進行浮點數編碼,個體長度為28,隱層節點個數初始值為10,由遺傳算法自適應調整,墨西哥帽小波母函數的時域中心取0,半徑取1.08。種群規模為20,總進化次數為50次。
通過評價篩選,采用實驗過程中的3 000組數據做樣本。2 900組樣本用來訓練小波網絡,訓練完成后的小波網絡結構為6-5-1,即含有5個隱層節點。權值參數如下:

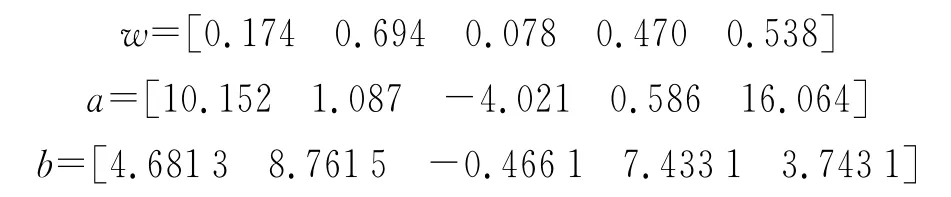
100組樣本用作轉矩預測實驗。預測結果見圖5。
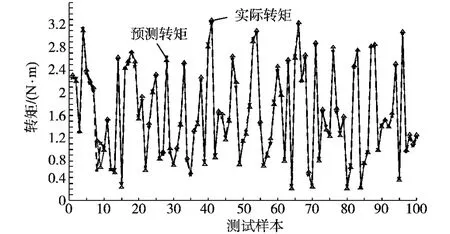
圖5 小波網絡轉矩預測結果Fig.5 Torque prediction using WNN
3 實驗結果
本文以Matlab為平臺對上述方法進行仿真,并設計、搭建了基于DSP芯片TMS320F2812的無刷電機控制系統。電機參數如下:額定電壓310V,額定轉速4 000r/min,額定電流5A,極對數為2。圖6為無刷電機DTC轉速響應,圖7為傳統轉速/電流雙閉環控制下負載突變時的轉矩響應。圖8為直接轉矩控制下負載突變時的轉矩響應。由圖8可知直接轉矩控制能有效減小轉矩脈動。

圖6 直接轉矩控制轉速響應Fig.6 Speed respond under DTC
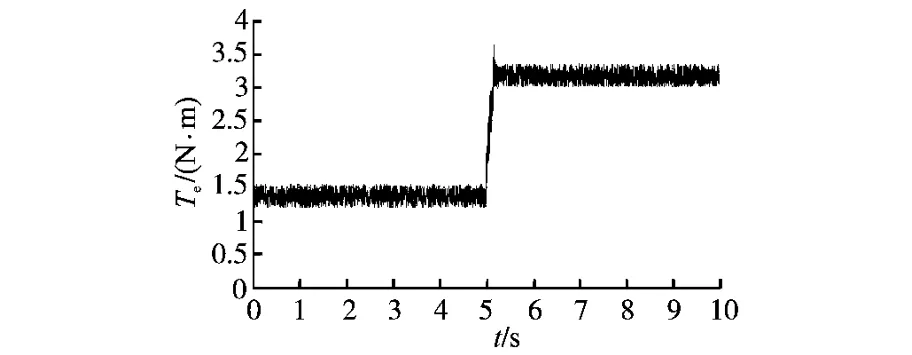
圖7 轉速/電流雙閉環控制轉矩響應Fig.7 Torque respond under speed-closedloop and current-closed-loop control
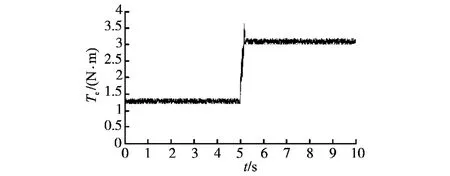
圖8 直接轉矩控制轉矩響應Fig.8 Torque respond under DTC control
4 結論
為解決無刷直流電機轉矩脈動較大的問題,本文將直接轉矩控制引入無刷電機控制中,采用二三相混合導通方式,構造出區別于傳統6扇區的12扇區電壓矢量空間。轉矩控制器輸出結合位置信號選擇最合適的電壓空間矢量,控制定子磁鏈的旋轉速度,進而調節磁通角,達到控制電磁轉矩的目的。并針對直接轉矩控制中轉矩觀測問題,構造1個6輸入,1輸出的小波神經網絡預測轉矩,效果良好。將以上控制策略應用到基于DSP的無刷電機系統中,實驗結果表明,基于小波神經網絡的轉矩預測,結合無刷電機12扇區直接轉矩控制,良好地實現無刷電機的轉矩平穩控制。
[1]Zhu Z Q.Direct Torque Control of Brushless DC Drives with Reduced Torque Ripple[J].IEEE Transactions on Industry Applications,2005,41(2):599-605.
[2]夏長亮,張茂華,王迎發,等.永磁無刷直流電機直接轉矩控制[J].中國電機工程學報,2008,28(6):104-109.
[3]Yang Jianfei,Hu Yuwen,Huang Wenxin,et al.Direct Torque Control of Brushless DC Motor Without Flux Linkage Observation[Z].Power Electronics and Motion Control Conference,2009.IPEMC 2009.IEEE 6th International,Wuhan,2009:1934-1937.
[4]尹中良.無刷直流電機的直接轉矩控制[D].鎮江:江蘇大學,2008.
[5]高瑾,胡育文,黃文新.基于反電勢形狀函數法的無刷直流電動機直接轉矩控制[J].南京航空航天大學學報,2007,39(4):417-422.
[6]劉國海,尹中良.一種高性能的無刷直流電機控制方法[J].江蘇大學學報:自然科學版,2009,30(2):165-168.
[7]鐘珞,饒文碧,鄒承明.人工神經網絡及其融合應用技術[M].北京:科學出版社,2007.
