微網孤島運行時基于逆變器的新型功率控制
2011-02-27 13:29:14劉進軍
電源學報 2011年1期
張 軒,劉進軍
(西安交通大學電氣工程學院,西安 710049)
1 引言
近年來,分布式發電系統的不斷發展對現有的電力市場帶來了益處,同時也帶來了極大挑戰。分布式能源的管理與控制技術的進步為微網的形成鋪平了道路[1]。微網是一種由分布式電源和負載構成的,有能力獨立運行的配電網系統[2]。微網可以平滑地過渡并運行于如下兩種方式[3,4]:
正常并網模式——微網與一主干中壓電網相連,既可以向電網輸送能量,也可以從電網中獲得能量。
緊急模式——微網與上級電網斷開,獨立運行。
大多數分布式能源由于其特性,不能直接接入微網。因此,需要電力電子接口(dc/ac或ac/dc/ac)從而使逆變器控制成為微網運行的關鍵[3,5]。在文獻[6,7]中,已經通過試驗驗證了微網孤島運行及重新連網技術,并且展示了逆變器在該過程中如何自動地將控制模式由電流源型轉換為下垂控制特性。但微網一般運行在低壓配電網中,這樣線路就不能近似為一純電感,而有著較高的R/L比率。因此在這種情況下,頻率-有功(P-f)、幅值-無功(Q-U)下垂特性就必須有所修正[8~10]。
通過以上修正,傳統的下垂特性在純阻性電路下變為頻率-無功、幅值-有功下垂特性,在高R/L比值下則變為P-P’-f和Q-Q’-U下垂特性。這樣,只要知道傳輸線路的阻抗特性,就可以精確地控制微網中逆變器之間的功率分配。但負載在較大范圍內變化時,頻率大幅偏移所帶來的穩定性問題依然存在。在文獻[11]中,這種問題得到了關注,但解決的方法是通過信號傳輸線從微網的總控制器中發出指令來設置某些逆變器的工作點,而不是對逆變器的無傳輸線獨立控制。
在本文中,用于微網孤島模式下逆變器并聯的一種新型的無傳輸線動態下垂控制策略被提出。通過動態地改變某類逆變器的下垂曲線位置,將頻率偏移控制到了設定的范圍內,極大地增強了微網系統的穩定性。本文首先對這種控制方法進行了分析,并提出了設計方法,最后通過PSCAD/EMTDC仿真對這種控制策略進行了驗證。
2 理論分析
2.1 傳統的下垂控制
對于如圖1所示的輸電線,從A點流入的有功P和無功Q可由下式表示:


圖1 通過傳輸線的有功與無功功率
在一般的線路長度下,傳輸線兩端的電壓相差δ 很小,因此有 sinδ≈δ,cosδ≈1,則上式可等效為:

式(3)、式(4)說明了在純感性傳輸線下,傳輸的有功功率的大小由端電壓相位差δ決定,而無功功率的大小則由端電壓的幅值差決定。而對頻率的控制可以自動地控制相角。因此,如果負載消耗的有功和無功確定的話,微網中逆變器電源的電壓頻率和幅值就被確定了。通過上述結論,可以得到傳統的P-f和Q-U下垂特性:

其中f0和U0分別為逆變器輸出電壓的額定頻率和幅度。而P0和Q0則分別為逆變器輸出的額定有功和無功。kp和kq分別為有功-頻率下垂特性斜率和無功-幅值下垂特性斜率。逆變器輸出電壓功率的下垂特性可以由圖(2)表示。

圖2 P-f與Q-U下垂特性
2.2 新型動態有功管理
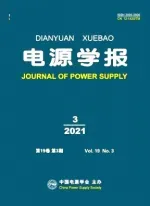
圖3 所示為兩臺逆變器的P-f下垂控制。在圖3(a)中,對A1和A2兩點輸出電壓的頻率通過圖3(c)所示的控制框圖來實現。在圖3(b)中,曲線sum為逆變器inv1和inv2輸出的總功率與頻率的下垂特性,當負載從“load0”變為“load1”,系統的頻率會從f0移至f1。這種控制策略可以使得逆變器之間有好的功率分配特性。但是當f1距f0較遠時,會對負載產生不良影響,甚至使整個系統不穩定。
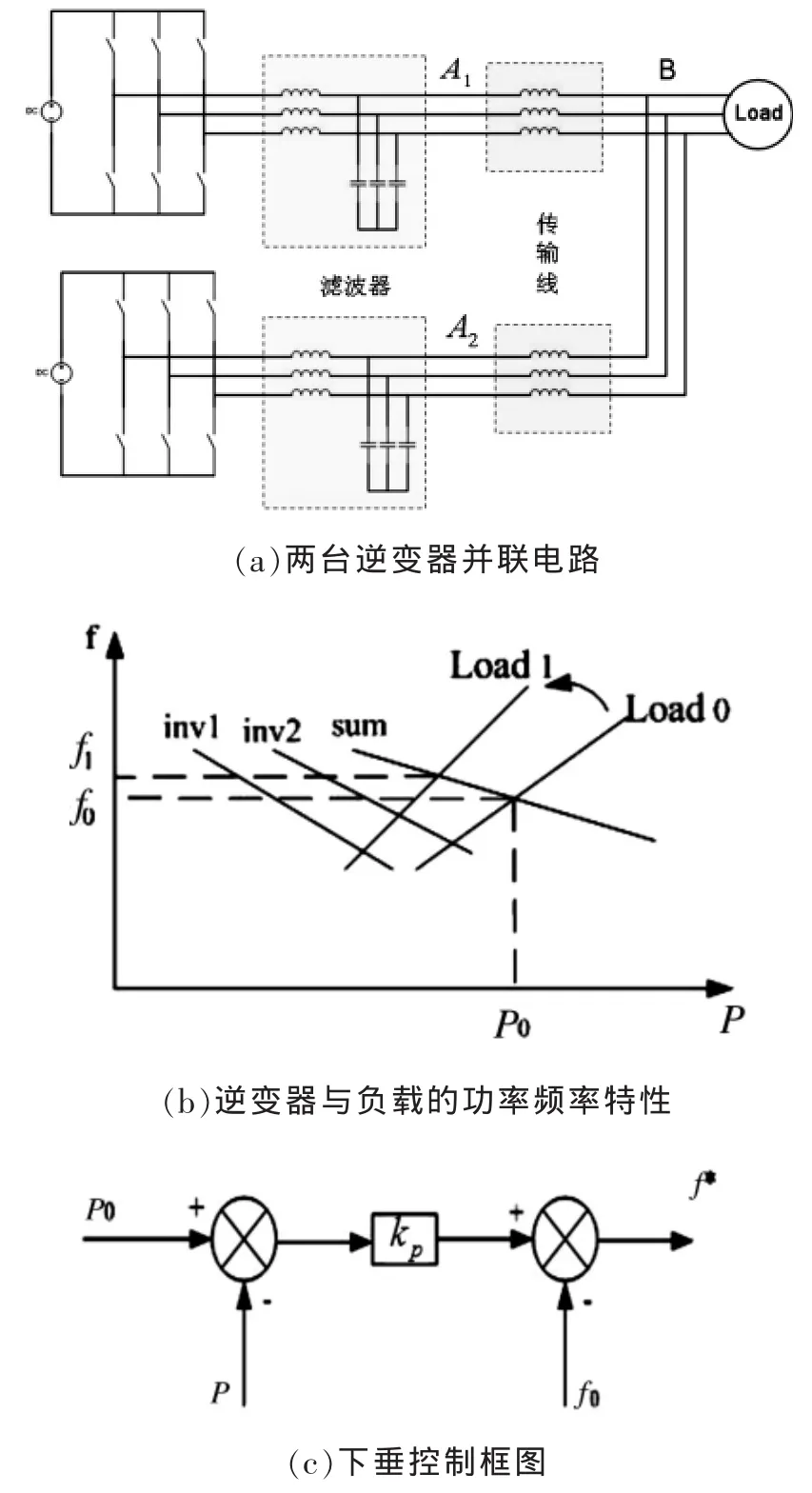
圖3 P-f下垂特性用于逆變器并聯
當頻率上升或下降到設定的閾值時,如50.0±0.2 Hz,通過改變P-f下垂曲線的位置,則可以使頻率重新回到50.0 Hz。如圖4(a)所示,在初始狀態,逆變器和負載的P-f曲線分別為曲線a和L0,當負載突增時,負載的P-f曲線變為L1,所以逆變器的工作點開始從A向C移動。但當工作點移動至B點時,出于對系統穩定性的考慮,系統頻率不能再降低。 這時 P-f曲線開始由 a向 a',a'',a'''…移動,在這期間,工作點由B向D移動。當下垂曲線由a移至b的同時,逆變器的工作點也由B點到達D點,這樣形成最終的P-f曲線,并且系統的頻率重新回到了50.0 Hz。在此之后,當負載再發生變化時,只要不使得頻率變動再次超過閾值,逆變器之間仍由傳統的方式分配功率。
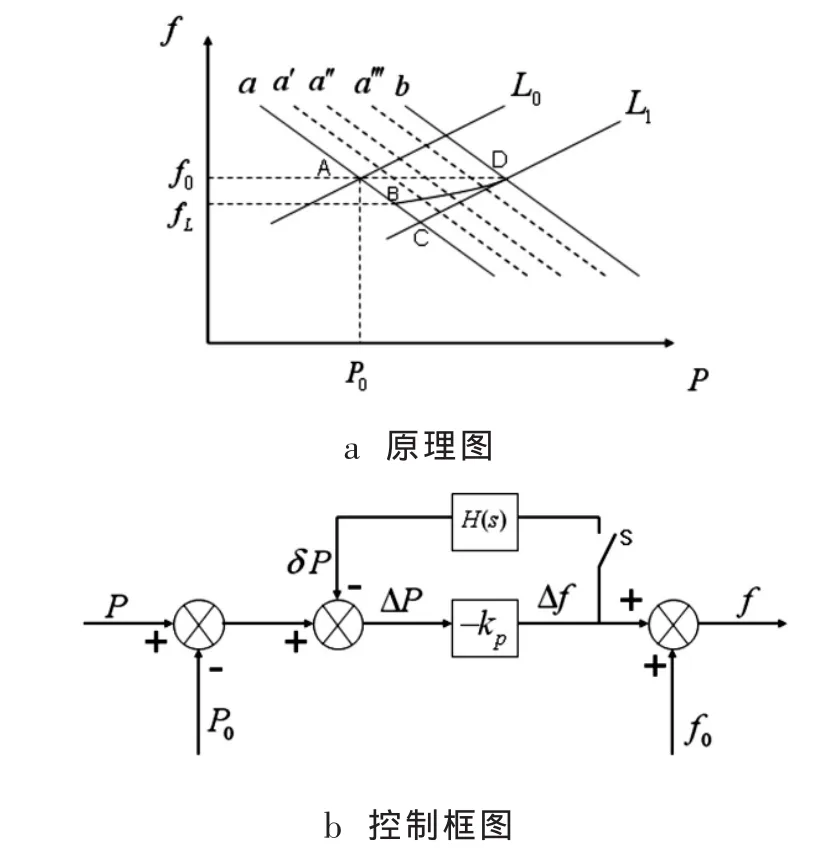
圖4 動態有功管理示意圖
這種動態能量管理的控制框圖由圖4(b)所示,其中 H(s)為調節器,S為開關。 當|Δf|達到閾值時,開關S閉合。通過調節Δf可以得到δP,這樣就改變了P-f曲線的位置,最終的曲線可由下式表示。

3 系統實現
當微網處于孤島模式下,微網中什么樣的逆變器可以應用這種動態有功管理?在對確定的逆變器進行控制時,如何控制開關S的開通和關斷時刻?當調節器進行調節時,如何使系統頻率重新回到50.0 Hz?這一節中將對這些問題進行討論。
3.1 對逆變器的選擇
微網的運行由幾個基本技術構成。這些包括:分布式發電(DG)、分布式儲能(DS)、連網開關以及系統控制[2]。其中,分布式發電和分布式儲能都需要通過逆變器才能與微網連接。
在分布式儲能技術中,儲能能力可分為中長期能量需要和短期能量需要。由于這種新型動態有功管理的特性,逆變器需要在較大范圍內調節其輸出功率和較大的能量密度。因此這種控制策略可應用于微網中提供中長期能量的分布式儲能系統。在分布式發電系統中,其輸出功率由自然環境決定,但當由負載下降有需要動態有功管理時,分布式發電系統仍可參與,其多余的能量可提供至與之相連或相近的儲能系統。
3.2 開關及調節器的設計
開關的控制框圖如圖5所示,ABS表示求絕對值,ABS輸出后的框圖中橫坐標表示頻率偏差的絕對值,縱坐標表示開關的狀態,1為開通,0為關斷。其功用為當負載的大幅變化使得系統的頻率偏移高于或達到設定的0.2 Hz時[12],開關S閉合,這時P-f曲線的位置開始移動。當輸出功率與負載在50.0 Hz處平衡時,開關S斷開。

圖5 對開關S的控制
當P-f曲線開始移動時,調節器H(s)的目的是使頻率偏移為零。調節器可表述為如下形式:

式中:k1表示積分系數;k2表示比例系數;s為傳遞函數自變量。
調節器的效果可由圖6說明。

圖6 調節器H(s)對Δf的作用
4 仿真驗證
本文中應用圖3(a)的電路拓撲,以及圖7所示的控制方式進行仿真驗證,仿真軟件為PSCAD/EMTDC,其中電路主要參數列于表1中。首先對傳統的功率下垂控制進行了仿真,然后用動態有功管理進行控制,并將二者進行比較。
表1 兩逆變器的P-f控制參數

圖7 兩臺逆變器并聯控制框圖
圖8 為在傳統P-f下垂控制下負載變動所引起的頻率變動,其中上部分P1為第一臺逆變器的輸出有功功率,P2為第二臺逆變器的輸出有功功率,Pload為負載吸收的總有功功率,單位為兆瓦;下部分f1為第一臺逆變器的輸出頻率,f2為第二臺逆變器的輸出頻率,單位為赫茲。在0.1 s后系統穩定,在0.3 s時,負載增加,兩臺逆變器按比例分配負載功率,系統頻率降至49.92 Hz,在0.7 s時,負載再次增加,這時系統頻率再次下降,低于頻率的設定下限49.8 Hz。

圖8 傳統P-f下垂控制的仿真結果
圖9 為對其中一臺逆變器進行動態有功管理后的P-f特性,各變量意義同圖(8)。從圖中可以看出,在0.7 s負載又一次增加時,頻率下降,當被控制的逆變器頻率(f)降至49.8 Hz時,頻率回升,最終在1.2 s處使得整個系統的頻率恢復至50.0 Hz,在1.5 s處負載又一次發生變化,逆變器之間又可以按比例分配負載。
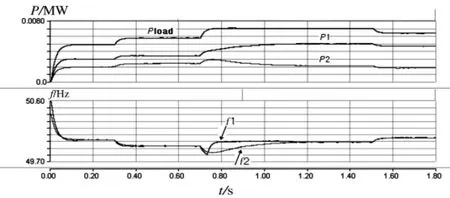
圖9 采用動態有功管理的仿真結果
5 結語
本文提出了針對微網孤島運行時的一種新型控制策略——動態功率平衡。通過動態地調整微網中某些逆變器的P-f曲線位置,使得在負載波動時大部分電源工作在額定功率附近,尤其使新能源電源在負載降低時仍保持高功率輸出,并緩解了逆變器間好的功率分配特性與大的頻率偏移之間的矛盾。顯著改善了負載大范圍波動時的微網穩定性。本文對應用該控制策略的逆變器類型,以及控制思想和設計思路均進行了論述。并通過仿真證實了該控制策略的有效性。
[1]Nigim K A,Wei-Jen Lee.Micro Grid Integration Opportunities and Challenges.Power Engineering Society General Meeting,2007.IEEE 24-28 June 2007 Page(s):1-6.
[2]Kroposki B,Lasseter R,Ise T,Morozumi S,Papatlianassiou S,Hatziargyriou N.Making microgrids work.Power and Energy Magazine,IEEE Volume 6,Issue 3,May-June 2008 Page(s):40-53.
[3]Katiraei F,Iravani R,Hatziargyriou N,Dimeas A.Microgrids Management.Power and Energy Magazine,IEEE Volume 6,Issue 3,May-June 2008 Page(s):54-65.
[4]Pecas Lopes J A,Moreira C L,Madureira A G.Defining control strategies for analyzing microgrids islanded operation.Power Tech,2005 IEEE Russia 27-30 June 2005 Page(s):1-7
[5]Chandorkar M C,Divan D M,Adapa R.Control of parallel connected inverters in standalone AC supply systems.Industry Applications,IEEE Transactions on Volume 29,Issue 1,Part 1,Jan.-Feb.1993 Page(s):136-143.
[6]Guerrero Josep M,Berbel Nestor,Matas Jose,Sosa Jorge L,de Vicuna Luis Garcia.Droop Control Method with Virtual Output Impedance for Parallel Operation of Uninterruptible Power Supply Systems in a Microgrid.Applied Power Electronics Conference,APEC 2007-Twenty Second Annual IEEE Feb.25 2007-March 1 2007 Page(s):1126-1132.
[7]Loix T,De Brabandere K,Driesen J,Belmans R.A Three-Phase Voltage and Frequency Droop Control Scheme for Parallel Inverters.Industrial Electronics Society,2007.IECON 2007.33rd Annual Conference of the IEEE 5-8 Nov.2007 Page(s):1662-1667.
[8]Laaksonen H,Saari P,Komulainen R.Voltage and frequency control of inverter based weak LV network microgrid.Future Power Systems,2005 International Conference on 18-18 Nov.2005 Page(s):pp.-6.
[9]Guerrero J M,Matas J,Luis Garcia de Vicuna,Castilla M,Miret J.Decentralized Control for Parallel Operation of Distributed Generation Inverters Using Resistive Output Impedance.Industrial Electronics,IEEE Transactions on Volume 54,Issue 2,April 2007 Page(s):994-1004.
[10]De Brabandere K,Bolsens B,Van den Keybus J,Woyte A,Driesen J,Belmans R.A Voltage and Frequency Droop Control Method for Parallel Inverters.Power Electronics,IEEE Transactions on Volume 22,Issue 4,July 2007 Page(s):1107-1115.
[11]Gil N J,Lopes J A P.Hierarchical Frequency Control Scheme for Islanded Multi-Microgrids Operation.Power Tech,2007 IEEE Lausanne 1-5 July 2007 Page(s):473-478.
[12] (GB/T15945-1995),電能質量電力系統頻率允許偏差[S].
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26