異步電機的自適應節能控制研究
2011-02-03 03:05:10王培全王鵬韓正之
電氣自動化 2011年3期
王培全 王鵬 韓正之
(上海交通大學 電子信息與電氣工程學院,上海 200240)
0 引言
基于矢量控制的異步電機節能增效控制方法,本質上是通過調節電機運行時磁鏈幅值來實現的。在采用轉子磁場定向的電機矢量控制系統中,定子電流勵磁分量和轉矩分量是解耦的,轉子磁鏈與勵磁分量成正比,因此可以通過控制勵磁電流來優化電機效率。目前異步電機節能控制方法大體上分為兩種:模型法(Loss Model Control,LMC)[1,2]和 搜 索 法 (Search Control,SC)[3~6]。模型法通過建立異步電機最小損耗模型,直接由計算獲得最優勵磁,系統響應速度快,但是需要精確建模,受電機參數和合環境溫度變化影響大,對不同電機缺乏通用性。搜索法省去了繁瑣的鐵芯分析,通過搜索電機運行的最小電流或者最小輸入功率來確定最優運行點,不依賴于電機參數和模型的先驗信息,尋優精度高,但是對電流、功率、轉速等的測量要求高,并且算法收斂時間較長。Rosenbrock法、梯度法和黃金搜索法是早期研究的一些搜索算法。近年來,智能控制技術的發展為以多變量、強耦合、非線性、大滯后、時變等為特征的電機系統研究提供了有力的工具。滑模變結構、遺傳算法、模糊控制[4-6]和人工神經網絡等方法紛紛引入電機控制領域。
1 異步電機節能運行原理
異步電機的損耗包括定子銅耗、轉子銅耗、鐵耗、機械損耗以及雜散損耗。銅耗與定子和轉子電流的平方成正比;鐵耗與氣隙磁通密度和電源頻率有關;機械損耗與電流和氣隙磁場無直接聯系但是和機械轉速有關,低速時機械損耗較小;雜散損耗是由于齒槽相對運動,磁阻變化等因素引起,難于建模也不易控制。因此,異步電機節能運行的重點是尋求銅耗和鐵耗的平衡。當電機運行在額定工況時,損耗以銅耗為主,鐵耗次之。而電機輕載運行時,若仍然保持磁通恒定,銅耗大大下降了,鐵耗卻變化不大。這時若適當降低磁通,鐵耗和定子銅耗會隨之降低。同時,為了維持轉矩不變,轉矩電流必須增加,從而導致轉子銅耗有所升高。若磁通降得過低,雖然鐵耗很小,但轉子銅耗和由轉矩電流而產生的定子銅耗會有明顯增加。因此,對于某一給定轉矩、轉速的運行點,存在一個最優磁通,使鐵損和銅耗達到某種平衡,電機的總損耗最小,此時系統運行實現最優化。
若忽略漏感,磁飽和與溫升對電機參數的影響,電機的可控損耗總和為

由于ploss一階導數存在零點且對其求二階導數得

圖1揭示了3個信息
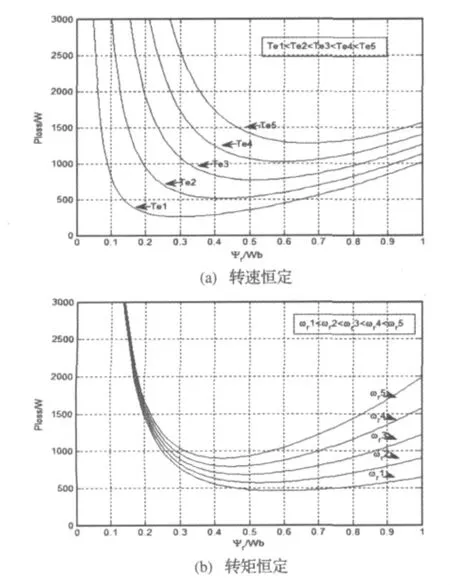
圖1 不同轉矩與轉速下的最優磁鏈
(1)對任意給定工況(一定轉矩和轉速),隨著磁鏈由額定值向零變化,損耗先單調遞減然后單調遞增,磁通是損耗的凸函數,總是存在一個最優磁通,使電機運行在此磁通時損耗最小。
(2)低速或者低轉矩工況下節能空間更大;
(3)在最優點兩側,損耗曲線并非對稱變化,而是在弱磁區變化的更快。這一特性影響了本文后面的模糊控制規則的不對稱設計。
圖2中逆變器直流側輸入功率Pd等于可控損耗ploss與逆變器損耗、機械損耗、雜散損耗之和,電機穩態時后三者變化不大,加之磁鏈Ψr與勵磁電流id是一一對應的關系,則可以近似認為Ψr是id的凸函數。
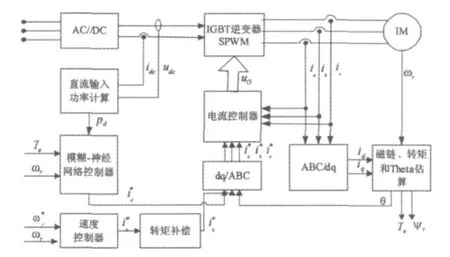
圖2 異步電機矢量控制結構框圖
2 控制系統
2.1 系統描述
節能優化控制是由模糊 神經網絡控制器實現的。模糊控制是一種非線性控制,對控制對象的非線性特征和參數變化有較好的適應能力,魯棒性強。模糊控制通過模糊推理,在尋優過程中自適應地調節搜索步長,算法的收斂性和收斂速度優于Rosenbrock法、黃金搜索法等傳統的一維搜索方法。Bp神經網絡是由靜態神經元組成的三層前向網絡。他能夠實現輸入到輸出的任何復雜非線性映射,而BP學習算法對神經網絡權值的調整具有較強的容錯性及自學習能力,經過訓練的BP神經網絡,對于不是樣本集中的輸入也能給出合適的輸出。
基于模糊控制和神經網絡的優點,本文將兩者結合起來設計節能控制器。在給定工況(一定的轉矩和轉子轉速)下通過模糊推理在線搜索,使異步電機輸入功率最低的最優勵磁電流值。最優點一旦找到,電磁轉矩、轉子轉速以及相應的最優勵磁電流值將被記錄,作為神經網絡的訓練樣本。經過在不同工況下采集的樣本的廣泛訓練后,神經網絡能夠學習到轉矩、轉速與最優勵磁電流的映射關系,這時神經網絡便可取代模糊控制器,無需搜索而對任意工況下的最優勵磁電流進行預測。
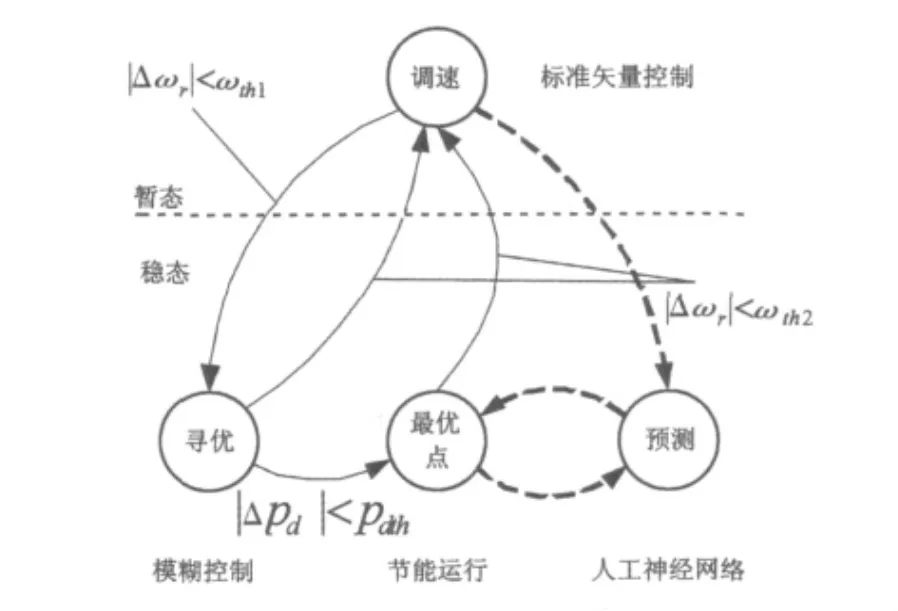
圖3 異步電機運行狀態圖
這種控制方法可以分為以下幾步:
(1)電機啟動、收到調速指令或者擾動引起負載變化時,電機采用標準矢量控制,磁鏈恢復到額定值以滿足快速輸出所需轉矩的要求。
(4)當神經網絡經過豐富的典型樣本訓練之后,就可以取代模糊控制器直接計算最優勵磁電流。
2.2 模糊控制器
模糊控制器選取雙輸入單輸出的結構。模糊系統的輸入為當前逆變器直流側輸入功率和前一采樣時刻功率值的增量,以及前一采樣時刻勵磁電流增量,經過模糊推理、模糊決策得到模糊輸出,再經過解模糊化得到精確控制變量。
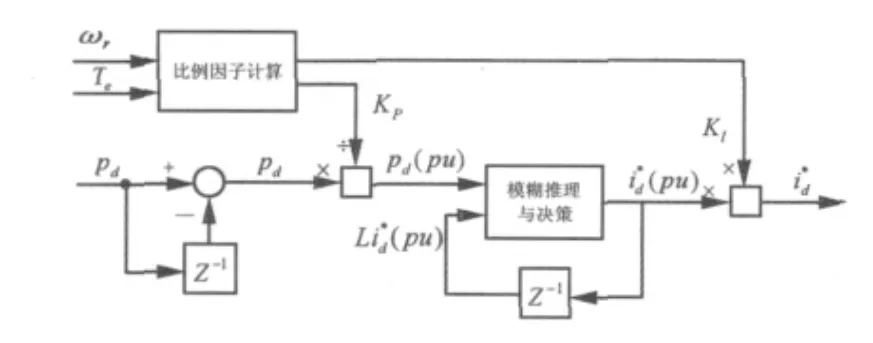
圖4 模糊控制器結構框圖
為了使模糊控制器能夠應用于不同功率、不同參數的電機,需要作標幺化處理,將輸入輸出統一設定到歸一化論域(-1,1)。其中功率增量和勵磁電流增量的比例因子按照下式得到
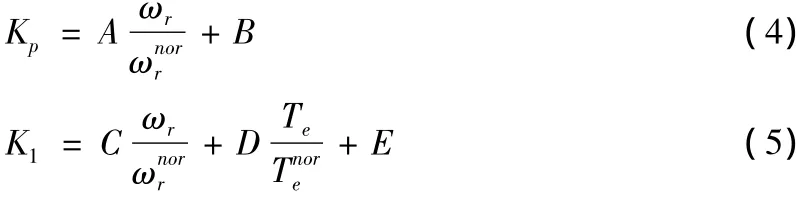
比例因子是轉速和轉矩估計值的函數,能使模糊控制輸出的勵磁電流對轉矩和轉速有自適應功能,優化收斂速度。
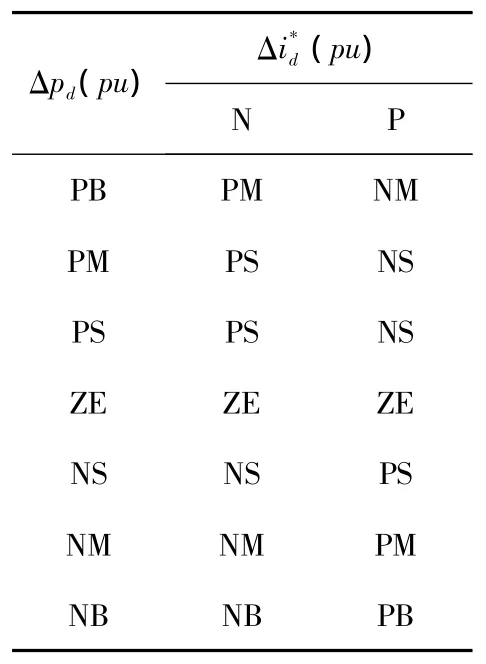
表1 模糊規則庫
模糊控制器的輸入Δpd(pu)和輸出Δ(pu)采用經典的七段劃分,自然語言表述為:正大、正中、正小、零、負小、負中和負大,對應的符號語言為 PB、PM、PS、ZE、NS、NM 和 NB。LΔ(pu)只需要區分正負,因此只劃分為P或者N。
模糊控制表可以解釋為:當上一次勵磁電流增量引起輸入功率下降時,繼續沿相同方向搜索;否則,輸入功率上升,沿相反的方向搜索,搜索步長與功率變化成正比。例如最后一條規則

表示,上一次勵磁電流正向變化(P),引起輸入功率大幅度下降(NB),則繼續以大步長增加勵磁電流(PB)。
Δpd(pu)的隸屬度函數中ZE選用梯形曲線,規定功率增量絕對值減少到一定程度時,終止模糊搜索,避免搜索算法在最優點附近震蕩。Δ(pu)=PB的隸屬度函數采用不對稱結構。從圖1可知,損耗曲線是磁鏈的單谷函數,但是并非關于極值點對稱,而是極值點左側的曲線遠比右側陡峭。因此搜索到左側區域時,功率對勵磁調節會更加敏感。為了避免深度削磁帶來的系統不穩定和超調引起的系統振蕩,有必要調節模糊控制算法,自動縮減在這一區域的搜索步長。于是如圖5(c)所示“壓縮”Δpd(pu)右半軸曲線。
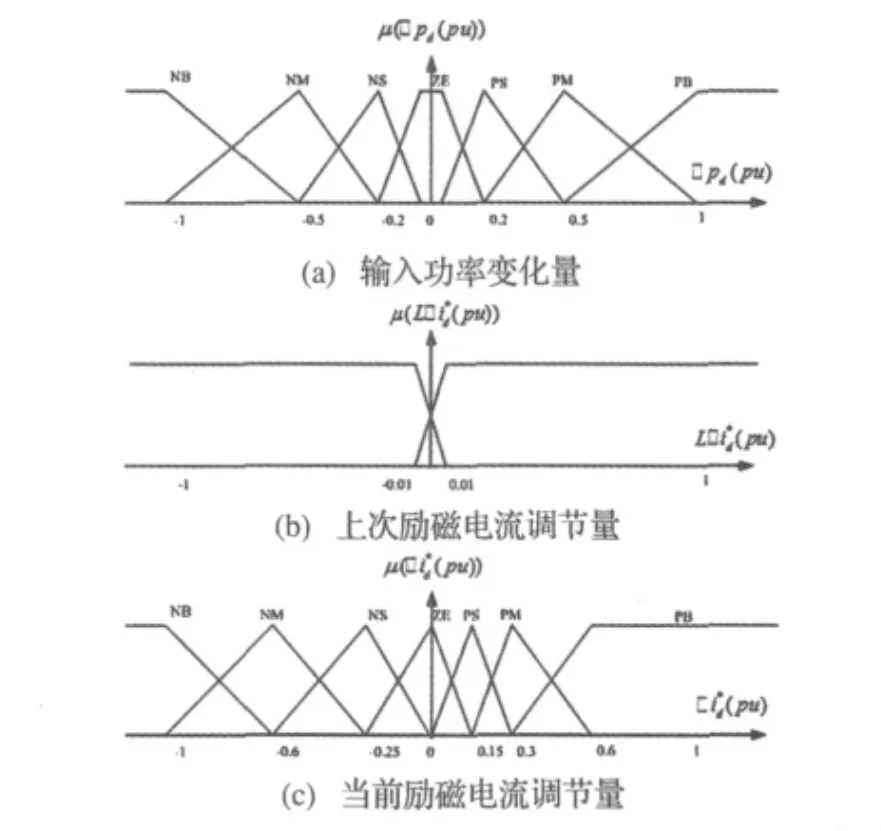
圖5 模糊控制器各個變量的隸屬度函數
2.3 BP神經網絡控制器
對于任意給定工況,轉子轉速和負載轉矩給定,總是存在一個使系統輸入功率最小的勵磁電流,記對應的最優運行狀態為,Te,ωr),由公式(3)知是(Te,ωr)的函數,Rm,Rs,Rr是變參數,而在電機穩態運行時它們都是常量。將最優運行點組成的點集作為訓練樣本,賦予BP神經網絡作曲面擬合,經過廣泛的訓練,神經網絡便能自動學習(Te,ωr)到的映射關系,進而可直接由(Te,ωr)計算任意工況對應的最優勵磁電流。
BP神經網絡以(Te,ωr)作為兩個輸入,作為輸出。根據Kolmogorov定理,BP神經網絡構建中隱含層數目n2=sqrt(n1+m+1)+a,其中n1和m分別為輸入層和輸出層數目,a為常數且a=1~10。取隱層神經網絡單元數位5,各單元激勵函數選用Sigmoid函數。BP算法基本思想是應用梯度搜索技術,期望通過調整權值減小輸出層的實際值與期望值的誤差均方值.在其網絡學習過程中,誤差一邊向后傳播一邊修正權系數。加權系數的調整采用誤差糾正學習規則,為了加快收斂速度,在實際應用中采用自適應調整學習速率的改進δ規則學習算法。神經網絡學習和搜索控制同步進行,無需額外的時間,可滿足實時控制的要求。
3 仿真分析
基于MATLAB/Simulink環境,對前文設計的控制算法作仿真研究,仿真電機選用 Y100L1-4(額定功率 2.2kW,380V,50HZ,2 對極),具體參數如下:Rs=0.865Ω,Rr=1.39Ω,Ls=Lr=0.8mH,Lm=156mH,Rm=98Ω,J=0.054kg·m2,采樣周期Ts=2e-6s,搜索步長0.2s。如圖6所示,0s啟動電機,負載轉矩4.5N·m(0.3pu),給定轉速 1100r/min(0.8pu)。前 1.5s秒為電機啟動時間,之后電機進入穩態運行。1.5s時加入節能控制算法。由于實施了轉矩電流前饋補償,電磁轉矩Te和轉子轉速n并未發生明顯變化。而在1s內轉子磁鏈Ψr從約0.9Wb調節到約0.6Wb,之后保持穩定。輸入功率 pd從 830W 下降到730W。
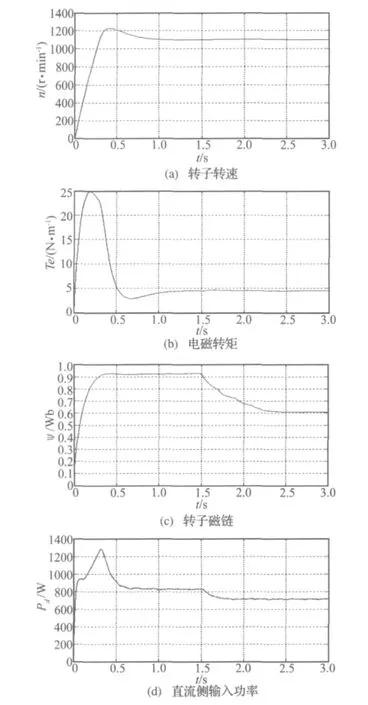
圖6 異步電機動態響應
4 結論
本文提出一種新的基于矢量控制變頻調速異步電機的節能控制策略。以逆變器直流側輸入功率為控制目標,采用模糊控制方法能夠快速穩定地搜索到使電機能耗最低的最優勵磁電流。同時將特定工況下獲得的最優狀態信息(轉矩、轉速以及勵磁電流)作為神經網絡的樣本集,經過反復訓練之后,神經網絡能夠準確預測任意工況下最優勵磁電流。仿真結果證明該方法能具有良好的節能效果。
[1] LIM S,NAM K.Loss-minimizing control scheme for induction motors[J].IEE Proc of Electric Power Applications,2004,151(4):385-397.
[2] 丁寶,孫滿意.基于矢量空間最小勵磁電流的電機節能研究[J].中國電機工程學報,2006,26(1):142-145.
[3] 劉曉虎,謝順衣,鄭力捷.一種改進的感應電機最大效率控制技術研究[J].中國電機工程學報,2005,25(6):95-98.
[4] 張立偉,溫旭輝,鄭瓊林.異步電機用混合式模糊搜索效率優化控制研究[J].中國電機工程學報,2007,27(27):83-87.
[5] Durval de Almeida Souza,et al.Adaptive fuzzy controller for efficiency optimization of induction motors. IEEE Trans. Ind. Electron.,2007,54(4).
[6] 徐占國,邵 誠.基于模糊技術感應電機最大效率控制策略的研究[J].控制與決策,2009,24(5):743-748.
[7] Energy efficient control of three-phase induction motor-a review[J].International Journal of Computer and Electrical Engineering,2009,1(1).
[8] 李健健,劉新正.基于矢量控制的異步電機節能運行的的研究[J].微電機,2010,43(3):14-17.