一類混雜系統的預測控制設計
2011-02-03 03:05:00鄒媛媛賈廷綱牛玉剛華東理工大學信息科學與工程學院上海0037上海電氣集團股份有限公司中央研究院上海0003
電氣自動化 2011年3期
鄒媛媛 賈廷綱 牛玉剛(.華東理工大學 信息科學與工程學院,上海 0037;.上海電氣集團股份有限公司中央研究院,上海 0003)
0 引言
分段線性(Piecewise Linear,PWL)系統作為一類基本的混雜動態系統模型,能夠用來描述許多工程實際系統中的混雜特性,如飽和、繼電器、死區等環節[1,2],也可以用來近似非線性系統。因此,對PWL系統控制問題的研究具有重要的理論和實際意義。
目前,預測控制已經被成功應用于 PWL系統[3-7],其中,PWL系統預測控制的穩定性綜合問題是大家關注的焦點[5,6]。針對這個問題,本文對含有兩個子系統的連續時間PWL系統進行預測控制器設計。首先,對每個子系統,設計有界控制器,在此基礎上,提出一種預測控制和有界控制相結合的混合控制方法,并給出子系統之間的穩定切換規則,從而保證系統的全局穩定性。這種方法的好處是只需要對每個子系統求解二次規劃問題,避免了對整個PWL系統求解含有邏輯變量的二次(或線性)規劃問題,降低了算法的復雜度。
1 有界控制
考慮如下的連續時間PWL系統

其中,x(t)=[x1(t)…xn(t)]T∈Rn是狀態向量,u(t)=[u1(t)…um(t)]T∈U?Rm是控制輸入向量。U是輸入約束,定義為U∶=系數矩陣分別為 Ai∈Rn×n,Bi∈Rn×m,i∈
考慮第i個子系統,設其Lyapunov函數為Vi=xTPix,存在滿足Ricatti方程


其中
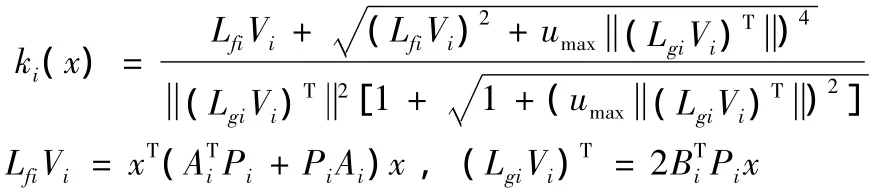
我們發現,如果狀態軌跡滿足如下條件

那么,根據Lyapunov理論,有界控制器(3)滿足輸入約束,并且Lyapunov函數是單調遞減的。利用集合Φi(umax),可以構造一個包含在Φi(umax)的最大橢圓集作為穩定域

其中,cimax>0是滿足Ωi(umax)?Φi(umax)的最大值。
對于系統(1)來說,穩定域估計集可以如下構造。假設S∶?為狀態分區的邊界

其中,c'jmax是滿足條件的最大值。則系統(1)的穩定域估計集
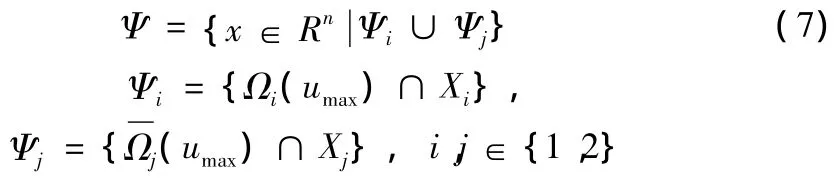

使得

其中,c'imax、c'jmax是滿足條件的最大值。則含系統(1)的公共的穩定域估計集為(7)的形式,

定理1 考慮系統(1),對第i個子系統,通過構造Lyapunov函數Vi,得到該子系統的有界控制器(3),穩定域估計集Ψ。假設初始狀態為 x0∈Ψi,i∈{1,2}。如果在時刻

那么狀態切換到第j個子系統,反復此控制過程,可得閉環系統是漸近穩定的。其中是第r次離開第i個子系統的時間為第m次進入第j個子系統的時間為第m-1次進入第j個子系統的時間。
雖然定理1給出的有界控制策略能夠保證閉環系統穩定,但是,有界控制對系統的最優性沒有要求,因此在有界控制的作用下系統的控制性能較差。
2 混合預測控制
由于預測控制是在最優性能指標的情況下,求解滿足系統狀態和輸入約束的控制律,因此,其具有良好控制性能。基于上述分析,本文將預測控制和有界控制相結合,在系統的穩定域估計集內,采用兩種控制律切換模式以達到系統穩定性和最優性的兼顧。
2.1 子系統預測控制
針對系統(1)的每個子系統,設計相應的預測控制器。考慮第i個子系統,x(t)為系統在t時刻的狀態,可以通過求解如下優化問題得到預測控制
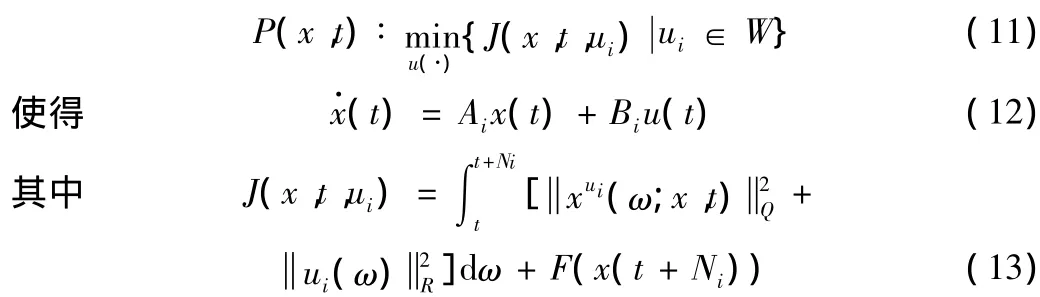
W=W(t,Ni)是一組由[t,Ni]映射到 U 的分段連續函數,Ni是預測時域,{ui[k]=ui(kT)}為要求的控制序列,滿足:ui(·)∈W ,ui(t)=ui[k],t∈[kT,(k+1)T],T 為采樣周期。xui(ω;x,t)是式(12)的解,Q和R是嚴格正定對陣矩陣,F是終端加權。
在時段[kT,(k+1)T]內,通過求解上述優化問題,可以得到一組預測控制序列。通常我們只采用第一個(·)∈W,即

作用到第i個子系統。
2.2 混合預測控制


3 仿真研究
為了驗證混合預測控制的有效性,考慮下面例子


針對(17)描述的兩個子系統,分別考慮對應的Lyapunov函數 xTPix。取,通過求解 Ricatti方程,可知

根據(7)的描述形式,系統(17)的穩定域估計集,預測控制目標函數的參數選擇為 Q=2×I2,R=0.1,時域長度 T=0.4。取初始狀態為x0=[23]T∈Ψ1,采用定理2提出的混合預測控制策略,閉環系統狀態軌跡漸近到達原點。
4 結論
本文針對一類混雜系統,提出了一種保證閉環系統穩定性的預測控制策略。對每個線性子系統,分別設計相應的有界控制器,并在此基礎上,基于子系統之間的狀態切換條件構造出系統的穩定域估計集。在穩定域估計集內,給出有界控制和預測控制相結合的控制策略,保證了不同子系統之間切換的穩定性。
[1] SONTAG E.Nonlinear regulation:The piecewise linear approach[J].IEEE Transactions on Automatic Control,1981,26(2):346-358.
[2] 張聚.混雜系統理論及在非線性系統中的應用研究[D].浙江大學,2005.
[3] 鄒媛媛,鄒濤,李少遠.混雜系統的預測控制.控制與決策,2007,22(4):361-365.
[4] 丁寶蒼.預測控制的理論與方法[M].北京:機械工業出版社,2008.
[5] 曾鋒,高東杰,李秀改.一類有約束的分段線性系統雙模預測控制.控制與決策,2006,21(5):597-600.
[6] ?ZKAN L,KOTHARE M V,GEORGAKIS C.Model predictive control of nonlinear systems using piecewise linear models[J].Computers and Chemical Engineering,2000,24(2-7):793-799.
[7] LAZAR M,HEEMALS W P M H.Predictive control of hybrid systems:Input-to-state stability results for sub-optimal solutions[J].Automatica,2009,45(1):180-185.
[8] El-Farra N H,Mhaskar P,Christofides PD.Uniting bounded control and MPC for stabilization of constrained linear systems[J].Automatica,2004,40(1):101-110.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26