遺傳算法整定PID控制器在下肢電刺激康復訓練中的應用
2011-01-29 01:44:04郭新奇郝林琳
中國醫學裝備 2011年10期
郭新奇 李 晴 郝林琳
1 引言
20世紀60年代,Liberson首次利用電刺激腓神經成功地矯正了偏癱患者足下垂的步態,開創了功能性電刺激(functional electrical stimulation,FES)用于運動和感覺功能康復治療的新途徑[1]。研究表明,FES通過電流脈沖序列來刺激肢體運動肌群及其外周神經,能夠有效地恢復或重建截癱患者的部分運動功能,是重要的康復治療手段[2]。
如何精密控制FES的脈沖電流強度和觸發時序以保證電刺激作用效果能準確完成預定的功能動作是FES的技術關鍵。早期的FES系統采用開環控制,憑經驗預先設置刺激強度和觸發時序[2-5],缺乏反饋機制。但由于肌肉、神經組織生理特性對刺激響應的隨時變化以及受試者之間的個體差異,開環控制的FES系統準確性和穩定性比較差。Lan等[6]將反饋機制引入功能性神經刺激中彌補了開環系統的不足。根據作用效果與預定動作偏差,用閉環控制來自動調整FES刺激強度和時序參數,明顯提高了FES系統的準確性和穩定性[7-10]。閉環控制需采用適當的反饋調節算法,比例微積分(proportional integral differential, PID)是一種非常實用的反饋調節算法,它根據系統檢測或操作偏差,利用比例、積分、微分運算獲得所需調節量以對系統進行反饋控制,因其操作方便而廣泛用于工程實踐。尤其當被控系統特性參數不明確或難以及時在線測定時,穩妥的閉環控制即可采用PID整定算法。面對肌肉的復雜性和時變性操作環境,由于PID的穩定性好、工作可靠,目前仍在功能性電刺激領域得到了廣泛的應用[11-12]。PID核心技術是精密確定其中比例、積分、微分系數,尤其在FES領域,對系統穩定性要求極為嚴格,所以對PID系數選擇尤為重要。PID控制要取得較好的控制效果,必須調整好比例、積分和微分三種控制作用,形成控制量中既相互配合又相互制約的關系。傳統的系數整定過程主要依賴于工程經驗,直接在控制系統的試驗中進行系數調試,主要有臨界比例法、反應曲線法和衰減法。臨界比例法,又稱Ziegler-Nichols整定法[13-14],最為常用。然而這些方法在某種程度上都沒有脫離人為的湊試,為了提高控制效率,出現了通過多種方法來確定PID系數的方法。例如Visioli等[15]用模糊自適應算法來選擇PID系數,Benaskeur等[16]利用逆推法對PID系數進行確定。
利用遺傳算法(genetic algorithm, GA)對PID的比例、積分和微分系數進行整定,是一種通過模擬自然進化過程搜索最優解的方法。從代表問題可能潛在的解集的一個種群開始,每一個種群則由經過編碼的一定數目的個體組成[17]。初代種群產生之后,按照適者生存和優勝劣汰的原理,逐代演化產生出越來越好的近似解,在每一代根據問題域中個體的適應度大小選擇個體,并借助于自然遺傳學的遺傳算子進行組合交叉和突變,產生出代表新的解集的種群。這個過程將導致種群像自然進化一樣的后生代種群比前代更加適應于環境,末代種群中的最優個體經過解碼,可以作為問題近似最優解。由于遺傳算法對潛在的解決方案直接搜索,對適應函數基本無限制,因此,選用遺傳算法對PID控制器的三個系數進行確定,優化高效的組合是一個很好的選擇。
2 PID算法及其遺傳算法整定
2.1 PID原理
PID由比例單元P、積分單元I和微分單元D三部分組成,根據系統的誤差,通過設定的Kp、Ki和Kd三個系數對系統進行控制[18]。

其中Kp是比例系數,Ki是積分系數,Kd是微分系數,error為預設輸出與實際輸出的偏差,u(t)為PID的輸出,同時又是受控系統的輸入。
2.2 Ziegler-Nichols整定方法
Ziegler-Nichols方法的整定思想是基于系統穩定性分析。該整定算法首先設Ki=0,Kd=0,然后增加Kp直至閉環系統開始出現振蕩(即系統極點出現在虛軸上),記下此時Kp值(表示為),然后運用如下整定公式:

2.3 基于遺傳算法整定的PID控制器
在遺傳算法整定PID控制器系數的過程中,采用二進制編碼方式,用二進制編碼串來分別表示PID控制器比例,積分和微分系數三個決策變量。遺傳算法流程圖如圖1所示。
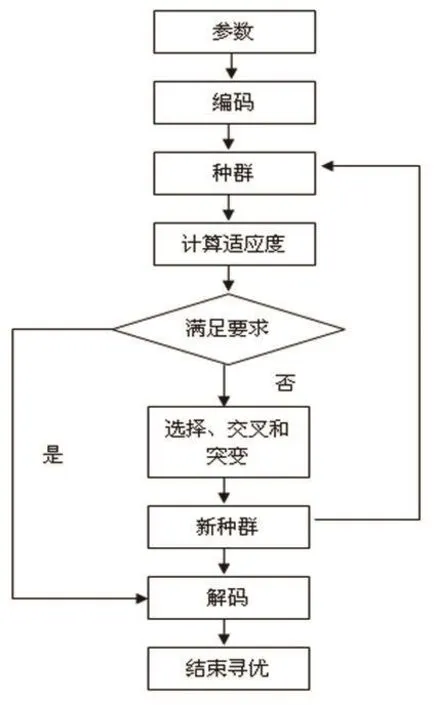
圖1 遺傳算法流程圖
首先確定參數整定的范圍,這個范圍由用戶給定,根據精度的要求進行編碼,選取二進制串表示每一個參數,并建立參數間的關系再把二進制串連起來組成一個長的二進制字串,該二進制字串則為操作對象。選取初始種群,由系統的復雜程度來確定種群的大小,根據待搜索的特征維數總量隨機產生一系列的由二進制位組成的個體。由‘01’序列的組合構成每一個個體,針對每一個個體,依據制定的規則,構建適合度函數并且計算其適合度作為評價個體適合度的依據,通過選擇算子,交叉算子,與突變算子產生下一代個體。
選擇算子用來根據個體的適合度選取較好的個體,通過繁殖產生下一代個體,體現了適者生存,不適應者淘汰的自然法則。給出目標函數f(bi)計算個體bi的適應度。適應度較高的個體,繁殖下一代的數目較多;適應度較小的個體,繁殖下一代的數目較少,甚至被淘汰。這樣,就產生了對環境適應能力較強的后代。對于問題求解角度來講,就是選擇出和最優解較接近的中間解。交叉算子對于選中用于繁殖下一代的個體,隨機地選擇兩個個體的相同位置,按交叉概率Pc在選中的位置實行交換。這個過程反映了隨機信息交換;目的在于產生新的基因組合,也即產生新的個體。突變算子以變異概率Pm對某些個體的某些位執行變異。在突變時,對執行變異串的對應位求反,即把1變為0,把0變為1。變異概率Pm與生物變異極小的情況一致,所以Pm的取值較小,一般取0.01~0.20。通過以上三個算子產生新一代的個體后,重復以上運算,當最優個體的適應度達到給定的閥值,或者最優個體的適應度和群體適應度不再上升時,則算法的迭代過程收斂、算法結束。否則,用經過選擇、交叉、變異所得到的新一代群體取代上一代群體,并返回繼續循環執行。
3 FES實驗設置
本實驗利用Labview實現遺傳算法對PID系數的優化,借助膝關節角度測量器獲得的信息進行 PID算法反饋控制,以此來調整功能性電刺激助行系統脈沖電流幅值的大小,改變刺激強度,使膝關節完成預設的角度動作。本實驗中采用的刺激系統包含微處理器和刺激脈沖發生電路,含6條刺激通道,電池供電。我們根據實驗需要對該助行裝置進行了改進,電刺激脈沖序列采用經典的Lilly波形,脈沖頻率為30 Hz、脈寬100 μs,電流脈沖的幅值在0~150 mA范圍內可調。本實驗通過同仁醫院倫理委員會批準,對6名受試者(3名男性,3名女性)進行下肢功能性電刺激雙側股四頭肌表面電刺激實驗。受試者身體健康,無下肢肌肉、骨骼疾患,無神經疾患及嚴重心肺疾患。其平靜坐于測試臺上,將表面刺激電極固定于股四頭肌的兩端位置,未施加電刺激時小腿放松、保持垂直懸空狀態(定義此時為初始角度0o)。實驗數據采樣率為256 Hz,數據記錄時長為60 s。實驗前需預先設定好期望的膝關節角度運動軌跡,利用電子角度測量器實時記錄膝關節張角變化,并且將其作為反饋信號通過AD轉換引入Labview算法程序。實驗前分別利用Ziegler-Nichols和遺傳算法對PID在系數進行整定,其中遺傳算法選用的個體種群數為50,進化的代數確定為100,交叉算子概率為0.6,突變概率的確定采用自適應的方法,與個體的適合度有關,越高的適合度,則突變概率越低。在整定優化的PID系數的作用下,計算求得刺激脈沖強度的大小,來控制功能性電刺激裝置刺激相應得肌肉,使得膝關節角度能夠按照預設軌跡進行運動,直至完成要求的整套動作。
4 結果與討論
分別利用傳統的Ziegler-Nichols PID整定算法和GA-PID整定算法優化的PID系數對6名受試者實驗過程中FES電流脈沖幅值進行在線調制,使得膝關節角度的運動軌跡在FES控制下與預設運動軌跡相吻合。對6名受試者進行刺激實驗的結果均表明,基于GA整定的PID控制器優于傳統的Ziegler-Nichols PID控制器,本文列其中一名受試者刺激實驗對控制結果予以說明(見圖2,圖3)。
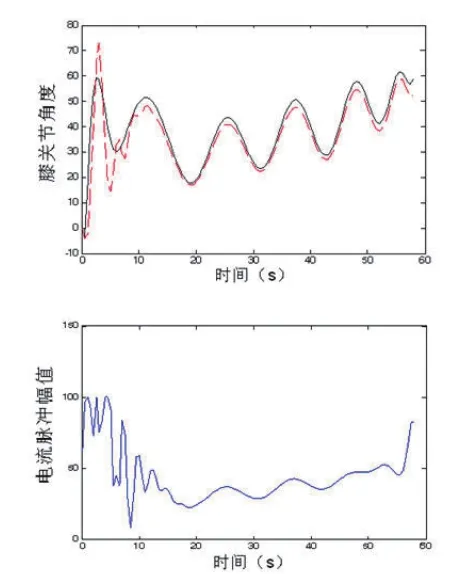
圖2 Ziegler-Nichols整定法的PID控制結果
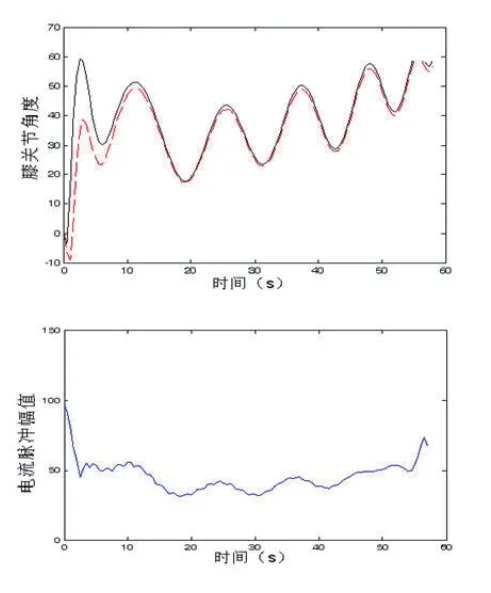
圖3 GA整定法的PID控制結果
圖2中,上圖為Z-N整定PID控制器追蹤預期關節角度的結果,其中實線為預期運動軌跡、虛線為實際輸出關節角度;下圖為Ziegler-Nichols整定PID控制器調制電流的脈沖幅值。圖3中上圖為GA整定PID控制器追蹤預期關節角度的結果,其中實線為預期運動軌跡、虛線為實際輸出關節角度。下圖為GA整定PID控制器調制電流的脈沖幅值。圖中實線表示預期運動軌跡、虛線為實際輸出關節角度。X軸為時間,Y軸為膝關節運動角度。對比圖2與圖3可以看出遺傳算法整定的PID新算法能更好地控制膝關節角度運動軌跡。
為更清楚地觀察兩種PID整定方式的控制誤差,監測了控制過程中偏差的均方根(RMS)值變化(如圖4所示,縱軸為RMS偏差的對數值。圖中實線為Ziegler-Nichols整定控制結果,虛線為GA整定整定結果)。
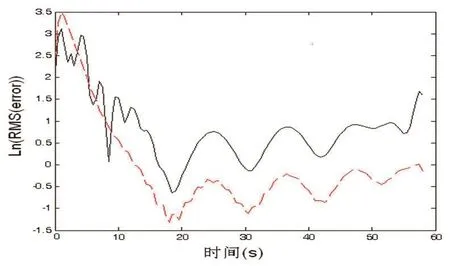
圖4 PID整定控制過程中偏差的均方根(RMS)值變化圖中縱軸為RMS偏差的對數值;實線為Ziegler-Nichols整定結果,虛線為GA整定結果
由于GA是在解空間進行高效啟發式搜索,能夠在保持原有最優解的基礎上,尋找更好的解決方案,使得整定的PID控制器具有更高的控制精度,誤差維持在相對更低且更為穩定的范圍內,相比之下Ziegler-Nichols整定法的控制誤差則波動較大。另外利用遺傳算法優化的PID控制器系數,通過選擇算子,交叉算子和突變算子進行全局優化,避免搜索的過程陷入局部最優解,能夠有效地克服控制過程中超調量的產生,大大降低超調量在控制過程中可能帶來的安全隱患。
利用遺傳算法PID控制器系數整定需要重視選擇,交叉和突變算子概率的確定:選擇算子概率過大會降低搜索解得收斂速度,過小則會發生有效基因的缺失;交叉算子概率關系到遺傳算法優質基因重組和解尋優的能力,而突變算子概率過小無法保證基因的多樣性和容易陷入局部最優解,過大則會破壞掉優秀的個體結構,所以在應用中需根據不同控制對象,選擇合理的概率參數,使得算法能夠快速,合理地得到優化的控制系數。
5 結論
將遺傳算法引入FES的PID反饋控制器中,利用適者生存和優勝劣汰的原理,逐代演化對PID控制器的比例、積分和微分系數進行優化以精確對功能性電刺激的電流脈沖幅值進行在線調制,使得膝關節角度的運動軌跡在FES控制下與預設運動軌跡相吻合經過與當前主流的通過經驗值或者人為的手工調試的傳統PID控制器相比,基于遺傳算法整定的PID算法相對于傳統的Ziegler-Nichols整定PID算法具有更高的反饋控制精度和更為穩定的反饋控制特性。因此,更適合用于要求反饋控制性能嚴格穩定的FES系統,從而保證了更為穩定的康復訓練效果。
[1]萬柏坤,李佳,明東.用于肢體運動系統的神經假體研究進展[J].中國醫療器械雜志.2006,30(4):235-240.
[2]藍寧,肖志雄,聶開寶,等.功能性電刺激原理、設計與應用[J].中國康復理論與實踐,1997,4(3):151-154.
[3]Hoshimiya N, Naito A. A multichannel FES system for the restoration of motor function in high spinal cord injury patients: a respiration-controlled system form multijoint upper extremity[J]. IEEE Trans. Biomed. Eng,1989,36(7):754-760.
[4]Buckett JR, Peckham PH, Thrope GB, et al. A flexible, portable system for neuromuscular stimulation in the paralyzed upper extremity[J]. IEEE Trans Biomed Eng,1988,35(11):897-904.
[5]Hausdorff JM , Durfee WK. Open-loop position control of the knee joint using electrical stimulation of the quadriceps and hamstrings[J].Med Bio Eng Comput,1992,29(3):269-280.
[6]Lan N, Crago PE, Chizeck HJ. Control of end-point forces of a multijoint limb by functional neuromuscular stimulation[J]. IEEE Transactions on Biomedical Engineering[J].1991,38(10): 953-965.
[7]Kamnik R, Shi JQ, Murray-Smith R, et al. Nonlinear modeling of FES-supported standing-up in paraplegia for selection of feedback sensors[J]. IEEE Transaction on Neural Systems and Rehabilitation Engineering.2005,13(1):40-52.
[8]Hunt KJ,Stone B, Negaord NO,et al. Control strategies for integration of electric motor assist and functional electrical stimulation in paraplegic cycling: utility for exercise testing and mobile cycling[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2004,12(1):89-101.
[9]Kurosawa K, Futami R, Watanabe T, et al. Joint angle control by FES using a feedback error learning controller[J]. IEEE Trans Neural Syst Rehabil Eng,2005,13(3):359-371.
[10]Chizeck HJ, Lan N, Palmieri LS, et al. Feedback control of electrically stimulated muscle using simultaneous pulse width and stimulus period modulation[J]. Biomedical Engineering IEEE Transactions on,1991,38(12):1224 -1234.
[11]Ferrarin M, Acquisto E D, Mingrino A.“An experimental PID controller for knee movement restoration with closed loop FES system[J]. Engineering in Medicine and Biology Society,1996. Bridging Disciplines for Biomedicine. Proceedings of the 18th Annual International Conference of the IEEE,1996(1): 453-454.
[12]Y u N Y, C h e n J J, J u M S. ClosedLoop control of quadriceps/ hamstring activation for FES-induced standing up movement of paraplegics[J]. Journal of Musculoskeletal Research,2001,5(3):173-184.
[13]Basilio JC, Matos SR. Design of PI and PID controllers with transient performance specification[J]. IEEE Transactions on Education,2002,45(4):364-370.
[14]Oubrahim R, Leonard F. PID tuning by a composed structure[J]. Control '98. UKACC International Conference on (Conf.Publ.No.455).1998(2):1333-1338.
[15]Visioli A. Tuning of PID controllers with fuzzy logic[J]. Control Theory and Applications, IEE Proceedings, 2001,148(1):1-8.
[16]B e n a s k e u r A R, D e s b i e n s A. Backstepping-based adaptive PID c ontrol[J].Control T h e ory and Applications,IEE Proceedings,2002,149(1): 54-59.
[17]劉金琨.先進PID控制MATLAB仿真[M].3版.北京:電子工業出版社,2011:325-358.
[18]Cheng L,Zhang G, Wan B,et al. Radial basis function neural network-based PID model for functional electrical stimulation system control[J]. Conf Proc IEEE Eng Med Biol Soc,2009,2009:3481-3484.