基于最優(yōu)信標(biāo)組的擴(kuò)展卡爾曼定位算法*
2011-01-02 03:59:24孟文超董齊芬
傳感技術(shù)學(xué)報(bào) 2011年4期
孟文超,俞 立,董齊芬,王 銘
(浙江工業(yè)大學(xué)信息工程學(xué)院,杭州310023)
無(wú)線傳感器網(wǎng)絡(luò)(Wireless Sensor Networks)是一門集微電子、通信、計(jì)算機(jī)和傳感器技術(shù)為一體的技術(shù),具有廣泛的應(yīng)用領(lǐng)域。隨著無(wú)線傳感器網(wǎng)絡(luò)的快速發(fā)展,傳感器節(jié)點(diǎn)的位置信息在WSNs的諸多應(yīng)用中扮演著不可或缺的重要角色,如在環(huán)境監(jiān)測(cè)、戰(zhàn)場(chǎng)偵察、目標(biāo)跟蹤等應(yīng)用中,監(jiān)測(cè)數(shù)據(jù)只有與節(jié)點(diǎn)位置信息綁定才有意義[1]。另外,節(jié)點(diǎn)位置信息也是大多數(shù)路由協(xié)議的基礎(chǔ)[2-3]。
近年來(lái),國(guó)內(nèi)外學(xué)者對(duì)無(wú)線傳感網(wǎng)定位技術(shù)進(jìn)行了深入研究。根據(jù)定位過(guò)程中是否測(cè)量節(jié)點(diǎn)間的距離,定位算法主要分為基于測(cè)距算法和無(wú)需測(cè)距算法[4]。無(wú)需測(cè)距的定位方法僅根據(jù)網(wǎng)絡(luò)的連通性來(lái)定位,定位精度在一定程序上依賴于網(wǎng)絡(luò)平均每跳距離的估計(jì)精度,而且當(dāng)網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)不規(guī)則時(shí),算法的性能急劇下降。如DV-Hop算法、APIT算法、質(zhì)心算法等[5]。基于測(cè)距的定位算法通過(guò)測(cè)量節(jié)點(diǎn)間距離或角度信息完成定位過(guò)程,如基于接收信號(hào)強(qiáng)度衰減的定位(RSSI)、基于到達(dá)時(shí)間的定位(TOA)、基于到達(dá)時(shí)間差的定位(TDOA)和基于角度的定位(AOA)。基于測(cè)距算法的定位精度一般高于無(wú)需測(cè)距算法,但一般需要額外硬件的支持[6]。
本文通過(guò)分析基于RSSI的定位技術(shù)存在的問(wèn)題,提出一種新的基于最優(yōu)信標(biāo)組的擴(kuò)展卡爾曼定位算法(BBG-EKF)。該算法在分析未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)的距離及信標(biāo)節(jié)點(diǎn)間的共線性對(duì)定位精度影響的基礎(chǔ)上,提出一種最優(yōu)信標(biāo)組選擇機(jī)制,進(jìn)而通過(guò)擴(kuò)展卡爾曼濾波實(shí)現(xiàn)定位,這樣既提供了較強(qiáng)的環(huán)境干擾魯棒性,又沒(méi)有增加網(wǎng)絡(luò)通信開(kāi)銷。實(shí)驗(yàn)結(jié)果表明,本文提出的定位算法在定位精度、通信量和環(huán)境干擾魯棒性等方面具有優(yōu)越性。
論文其余部分安排如下:第1部分,介紹基于RSSI的測(cè)距原理;第2部分,分析影響定位精度的因素,并在此基礎(chǔ)上提出一種選擇最優(yōu)信標(biāo)組機(jī)制;第3部分,引入擴(kuò)展卡爾曼濾波消除RSSI測(cè)量中的環(huán)境噪聲;最后是算法仿真與總結(jié)。
1 RSSI測(cè)距模型
為適應(yīng)實(shí)際環(huán)境中存在的多徑效應(yīng)、繞射、障礙物等因素,本文利用RSSI值并結(jié)合傳播路徑損耗經(jīng)驗(yàn)?zāi)P陀?jì)算未知節(jié)點(diǎn)到信標(biāo)節(jié)點(diǎn)的距離。通常引入隨機(jī)干擾的對(duì)數(shù)-正態(tài)分布模型作為無(wú)線傳感器網(wǎng)絡(luò)路徑損耗模型[12]。

式中,d是發(fā)射節(jié)點(diǎn)與接收節(jié)點(diǎn)之間的距離,P(d)是距離為d時(shí)的接收信號(hào)強(qiáng)度,d0為參考距離,通常取1 m,P0(d0)是距離為d0時(shí)的接收信號(hào)強(qiáng)度,Xσ的均值為0、標(biāo)準(zhǔn)差為σ的高斯白噪聲,n是與環(huán)境相關(guān)的路徑損耗指數(shù)。由于不同的環(huán)境對(duì)測(cè)距有較大影響,為了得到更高的定位精度,需要針對(duì)特定的環(huán)境,通過(guò)實(shí)驗(yàn)獲得相應(yīng)的n和Xσ。
2 信標(biāo)節(jié)點(diǎn)選擇
無(wú)論是基于測(cè)距的定位還是測(cè)距無(wú)關(guān)的定位,都要利用信標(biāo)節(jié)點(diǎn)。一般來(lái)說(shuō),可選擇的信標(biāo)節(jié)點(diǎn)信息越多,估計(jì)的位置越準(zhǔn)確。另外,信標(biāo)節(jié)點(diǎn)之間的位置拓?fù)潢P(guān)系及未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)之間的距離都在很大程度上影響定位結(jié)果。本節(jié)主要從這兩方面分析它們對(duì)定位精度的影響,為合理選擇最優(yōu)信標(biāo)節(jié)點(diǎn)提供依據(jù)。
2.1 未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)之間的距離
在基于RSSI測(cè)距的定位技術(shù)中,參與定位的信標(biāo)節(jié)點(diǎn)數(shù)越多,定位精度越高。但是,當(dāng)信標(biāo)組中存在遠(yuǎn)離未知節(jié)點(diǎn)的信標(biāo)節(jié)點(diǎn)時(shí),定位效果將變差。定義距離估計(jì)誤差即發(fā)射節(jié)點(diǎn)與接收節(jié)點(diǎn)的估計(jì)距離與真實(shí)距離 d的差值為,則=-d。由式(1)易得與 d、Xσ的關(guān)系式為:

從式(3)可以看出:當(dāng)RSSI測(cè)距模型中的σ2及n確定時(shí),距離測(cè)量誤差與發(fā)射節(jié)點(diǎn)和接收節(jié)點(diǎn)間的距離成正比,距離越遠(yuǎn),距離測(cè)量誤差越大。為了分析距離對(duì)定位精度的影響,考慮未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)的距離分別從1 m至10 m變化,測(cè)距誤差隨距離變化的結(jié)果如圖1所示。
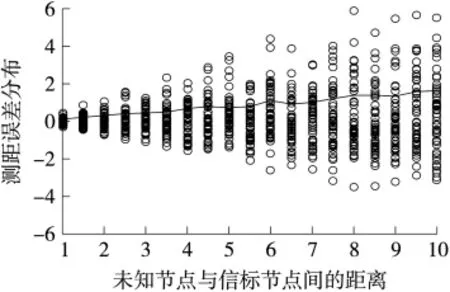
圖1 距離誤差分布
仿真結(jié)果表明:在基于RSSI的測(cè)距技術(shù)中,由于誤差的累積性,當(dāng)接收節(jié)點(diǎn)遠(yuǎn)離發(fā)射節(jié)點(diǎn)時(shí),距離測(cè)量誤差也會(huì)隨之增加,從而影響定位精度。因此,為了優(yōu)化定位效果,應(yīng)選擇未知節(jié)點(diǎn)最近的K個(gè)信標(biāo)節(jié)點(diǎn)進(jìn)行定位。理論上,信標(biāo)節(jié)點(diǎn)與未知節(jié)點(diǎn)的距離越近,RSSI值越大,所以在定位過(guò)程中,直接選擇RSSI值最大的K個(gè)信標(biāo)節(jié)點(diǎn)。
2.2 信標(biāo)節(jié)點(diǎn)的共線度
在二維空間中,未知節(jié)點(diǎn)只需獲得三個(gè)信標(biāo)節(jié)點(diǎn)的位置信息,就可以確定自身的位置。然而,當(dāng)3個(gè)信標(biāo)節(jié)點(diǎn)共線或接近共線時(shí),較小的測(cè)距誤差都會(huì)導(dǎo)致很大的定位誤差[13]。如圖2所示:當(dāng)信標(biāo)節(jié)點(diǎn)B1、B2、B3幾乎在一條直線上時(shí),信標(biāo)節(jié)點(diǎn)通信圓周的交點(diǎn)不唯一,也就無(wú)法確定未知節(jié)點(diǎn)究竟是在N1還是在N2。
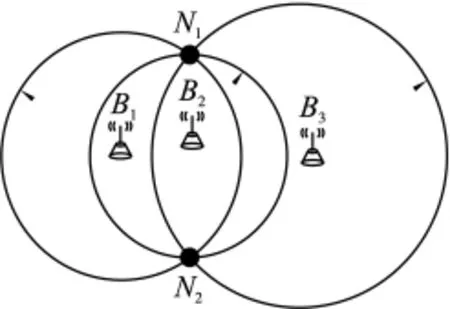
圖2 信標(biāo)節(jié)點(diǎn)共線情況
為了解決信標(biāo)節(jié)點(diǎn)的共線問(wèn)題,引入共線度NC的定義。共線度NC定義為信標(biāo)節(jié)點(diǎn)組成的三角形中最小角的余弦值。如圖3(a)所示,A、B、C是三個(gè)信標(biāo)節(jié)點(diǎn),∠A是三角形ABC中最小角,則用∠A的余弦值來(lái)衡量信標(biāo)節(jié)點(diǎn)組的共線程度,即:

因?yàn)楣簿€度定義為三角形最小角的余弦值,最小角的取值范圍為0°~60°,對(duì)應(yīng)共線度NC的取值范圍為0.5~1。當(dāng)NC值等于0.5時(shí),代表信標(biāo)節(jié)點(diǎn)組成的三角形是等邊三角形,此時(shí)用這組信標(biāo)節(jié)點(diǎn)進(jìn)行定位,效果最好。當(dāng)NC值等于1時(shí),代表信標(biāo)節(jié)點(diǎn)組在一條直線上,此時(shí)定位效果最差。
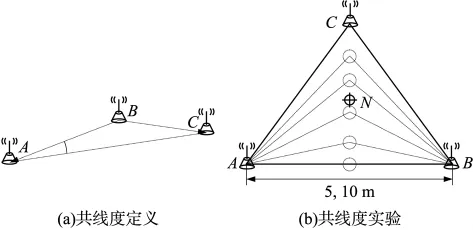
圖3 共線度的定義與實(shí)驗(yàn)示意圖
如圖3(b)所示,為了分析共線度對(duì)定位精度的影響,保持信標(biāo)節(jié)點(diǎn)A、B的距離不變,通過(guò)改變信標(biāo)C的位置來(lái)獲得不同的NC值,信標(biāo)節(jié)點(diǎn)C從AB的中點(diǎn)移動(dòng)到三個(gè)信標(biāo)節(jié)點(diǎn)構(gòu)成等邊三角形的位置,未知節(jié)點(diǎn)N放置在等邊三角形ABC的中心。采用傳統(tǒng)的極大似然估計(jì)對(duì)未知節(jié)點(diǎn)N進(jìn)行定位,得到共線度與定位精度的關(guān)系如圖4所示。實(shí)驗(yàn)結(jié)果表明:平均定位誤差隨著共線度NC的增大而增大,當(dāng)NC小于0.75時(shí),定位性能比較穩(wěn)定,而在NC大于0.75時(shí),定位性能隨著NC的增大發(fā)生明顯惡化。為了提高定位精度,設(shè)定共線度閾值CM,篩選NC≤CM的信標(biāo)節(jié)點(diǎn)組。
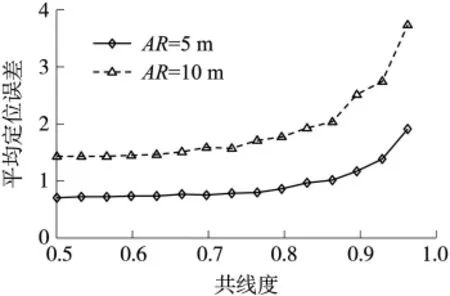
圖4 共線度與定位精度的關(guān)系
2.3 最優(yōu)信標(biāo)組
由以上分析可知,信標(biāo)節(jié)點(diǎn)距離未知節(jié)點(diǎn)越遠(yuǎn),信標(biāo)節(jié)點(diǎn)間共線度越大,未知節(jié)點(diǎn)的平均定位誤差越大,這為合理選擇最優(yōu)信標(biāo)組提供了依據(jù),最優(yōu)信標(biāo)組應(yīng)選擇未知節(jié)點(diǎn)附近共線度最小的一組信標(biāo)組。
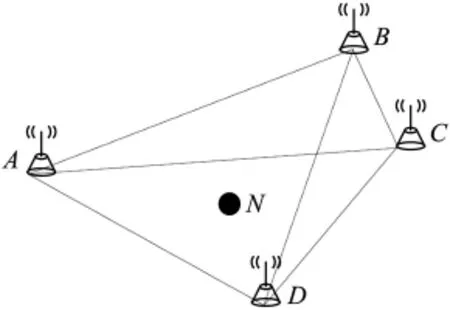
圖5 最優(yōu)信標(biāo)組
為減少計(jì)算復(fù)雜度,定義一組信標(biāo)組包含三個(gè)信標(biāo)節(jié)點(diǎn)。最優(yōu)信標(biāo)組的選擇如圖5所示,離未知節(jié)點(diǎn)N最近的四個(gè)信標(biāo)節(jié)點(diǎn)分別是A、B、C、D,組成ABC、ABD、BCD、ACD等四個(gè)導(dǎo)標(biāo)三角形,根據(jù)共線度的定義易知三角形ACD的共線度最小,為未知節(jié)點(diǎn)N的最優(yōu)信標(biāo)節(jié)點(diǎn)組。
3 擴(kuò)展卡爾曼定位
理論上,根據(jù)上述信標(biāo)選擇機(jī)制確定了最優(yōu)信標(biāo)組后,利用極大似然法即可得到較高精度的定位效果。然而,實(shí)際環(huán)境中,噪聲、多徑效應(yīng)、非視線關(guān)系等條件的變化使得實(shí)際接收到的信號(hào)強(qiáng)度存在比較大的誤差,該誤差表現(xiàn)為高斯白噪聲,影響定位結(jié)果。卡爾曼濾波[14-15]在高斯白噪聲的動(dòng)態(tài)系統(tǒng)中是一種最優(yōu)濾波器,可以有效地抑制RSSI測(cè)量中噪聲,增強(qiáng)環(huán)境干擾魯棒性,提高定位精度,本節(jié)分析利用基于擴(kuò)展卡爾曼的定位算法。
3.1 擴(kuò)展卡爾曼模型
(1)狀態(tài)方程模型

式中,xk=(xk,yk)T表示未知節(jié)點(diǎn)在第k-1個(gè)信標(biāo)位置進(jìn)行濾波計(jì)算后的坐標(biāo)向量,wk是系統(tǒng)噪聲,服從N(0,Qk)高斯分布,φk是系統(tǒng)矩陣,在未知節(jié)點(diǎn)的定位過(guò)程中,認(rèn)為未知節(jié)點(diǎn)的位置是固定的,所以φk為二階單位矩陣,系統(tǒng)噪聲方差Qk=0。
(2)測(cè)量方程模型
文中選用未知節(jié)點(diǎn)到信標(biāo)節(jié)點(diǎn)之間的距離作為EKF的測(cè)量值,測(cè)量方程為

式中,di為未知節(jié)點(diǎn)到第i個(gè)信標(biāo)節(jié)點(diǎn)的距離,它是根據(jù)1節(jié)描述的測(cè)距方法測(cè)得,(Xi,Yi)是第i個(gè)信標(biāo)節(jié)點(diǎn)的坐標(biāo),(x,y)是未知節(jié)點(diǎn)的坐標(biāo),vi是測(cè)量噪聲,服從均值為零,方差為R的高斯分布。通過(guò)在平衡點(diǎn)展開(kāi)泰勒級(jí)數(shù)對(duì)測(cè)量方程線性化處理,平衡點(diǎn)取上一次濾波后未知節(jié)點(diǎn)的坐標(biāo)向量,線性化后的測(cè)量方程為:
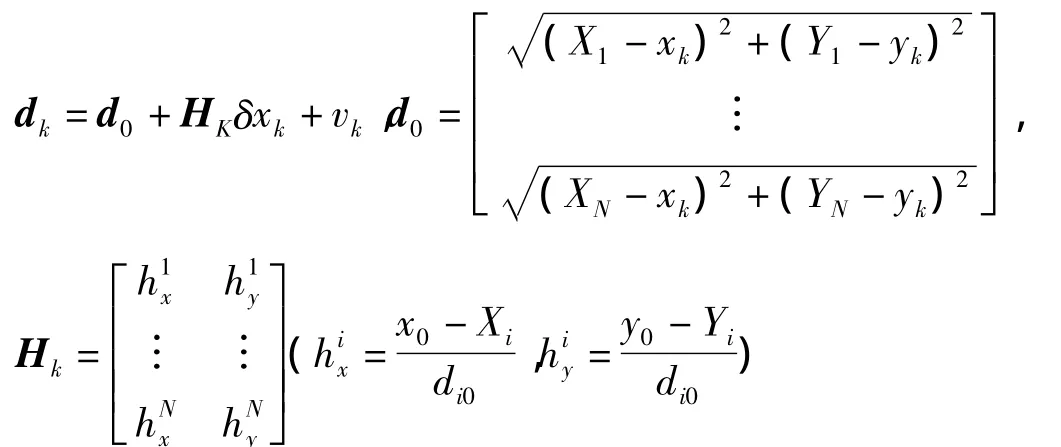
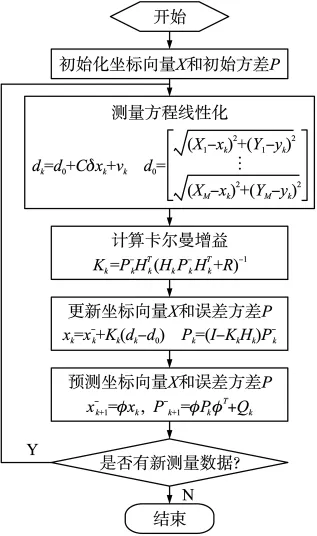
圖6 EKF定位流程圖
擴(kuò)展卡爾曼定位的流程圖如圖6所示,主要包括狀態(tài)變量及誤差方差陣初始化、狀態(tài)方程及測(cè)量方程線性化、計(jì)算卡爾曼增益、更新?tīng)顟B(tài)變量、預(yù)測(cè)等五個(gè)步驟。狀態(tài)初值和初始狀態(tài)誤差方差陣的正確選擇,對(duì)于EKF的收斂速度和定位精度有很大的影響,為了減少算法的復(fù)雜度,初值任意選取,而不是采用特定定位算法給出比較準(zhǔn)確的值,但同時(shí)為加快EKF的收斂速度,本文選取比較大的初始狀態(tài)及誤差協(xié)方差。
4 算法過(guò)程
(1)信標(biāo)節(jié)點(diǎn)周期性發(fā)送包含節(jié)點(diǎn)ID、位置坐標(biāo)信息包。
(2)未知節(jié)點(diǎn)收到信標(biāo)節(jié)點(diǎn)的信息后,對(duì)信標(biāo)節(jié)點(diǎn)依其RSSI值從大到小排序,并建立RSSI值與未知節(jié)點(diǎn)到信標(biāo)節(jié)點(diǎn)距離的映射,建立3個(gè)集合。
信標(biāo)節(jié)點(diǎn)集合:

未知節(jié)點(diǎn)到信標(biāo)節(jié)點(diǎn)距離集合:

信標(biāo)節(jié)點(diǎn)位置集合:

(3)未知節(jié)點(diǎn)首先從信標(biāo)集合Beacon_set中選取離未知節(jié)點(diǎn)最近的4個(gè)節(jié)點(diǎn),然后每3個(gè)信標(biāo)節(jié)點(diǎn)組成一組信標(biāo)組,總共可以分成C34組,分別計(jì)算各個(gè)信標(biāo)組的共線度后,選取共線度最小的一組作為最優(yōu)信標(biāo)組。
(4)未知節(jié)點(diǎn)坐標(biāo)向量的初值任意取定,初始狀態(tài)誤差協(xié)方差P0取值偏大些,使EKF盡快收斂于真實(shí)值。把x0,P0代入圖6的流程圖中,迭代到指定次數(shù)或者滿足定位精度要求為止。
5 仿真實(shí)驗(yàn)
為了檢驗(yàn)BBG-EKF算法的可行性和有效性,本部分主要對(duì)算法進(jìn)行仿真。仿真在Matlab平臺(tái)上進(jìn)行,默認(rèn)的仿真參數(shù)P0(d0)=5,σ=4,并通過(guò)與擴(kuò)展卡爾曼定位算法(EKF)、基于最優(yōu)信標(biāo)組的極大似然估計(jì)算法(BBG-MLE)、極大似然估計(jì)算法(MLE)做比較,分析該算法的性能。不失一般性,假設(shè)200個(gè)未知節(jié)點(diǎn)和一定數(shù)目的信標(biāo)節(jié)點(diǎn)隨機(jī)部署于50 m×50 m的正方形區(qū)域C中,當(dāng)未知節(jié)點(diǎn)通信范圍內(nèi)少于3個(gè)信標(biāo)節(jié)點(diǎn),采用弗洛伊德算法(Floyd Algorithm)獲得與其它信標(biāo)節(jié)點(diǎn)的最短距離。
圖7是通信半徑R=15、信標(biāo)節(jié)點(diǎn)數(shù)M=20時(shí)BBG-EKF的定位效果,其中圓圈表示未知節(jié)點(diǎn),方塊表示信標(biāo)節(jié)點(diǎn),直線連接未知節(jié)點(diǎn)的真實(shí)坐標(biāo)和它的估計(jì)坐標(biāo),直線越長(zhǎng),定位誤差越大。仿真結(jié)果表明:BBG-EKF的平均定位誤差約為1.5 m,C1區(qū)域中,信標(biāo)節(jié)點(diǎn)的共線度較小,未知節(jié)點(diǎn)的定位誤差偏小,相反,C2區(qū)域中,信標(biāo)節(jié)點(diǎn)幾乎在同一條直線上,未知節(jié)點(diǎn)的定位誤差偏大,同時(shí)受邊緣效應(yīng)的影響,在區(qū)域邊緣的平均定位誤差明顯偏大。
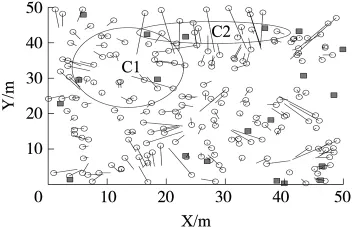
圖7 BBG-EKF定位效果
擴(kuò)展卡爾曼定位算法的定位精度受迭代次數(shù)的影響,迭代次數(shù)越多,定位精度越高。圖8是坐標(biāo)為(5,5)的未知節(jié)點(diǎn)分別采用BBG-EKF及BBG-MLE的定位效果,仿真結(jié)果表明,BBG-EKF定位算法在迭代15次左右收斂于真實(shí)坐標(biāo),而BBG-MLE定位算法始終發(fā)散。
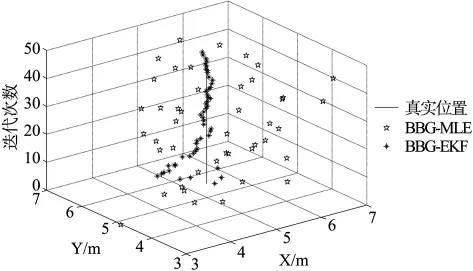
圖8 迭代次數(shù)影響
如圖9所示是不同通信半徑下平均定位誤差的比較,其中信標(biāo)節(jié)點(diǎn)占25%。在一定范圍內(nèi),通信半徑與網(wǎng)絡(luò)連通度成正比,即節(jié)點(diǎn)通信半徑越大,平均每個(gè)未知節(jié)點(diǎn)周圍可通信的節(jié)點(diǎn)個(gè)數(shù)越多。仿真實(shí)驗(yàn)表明:BBG-EKF算法、EKF算法、MLE算法的定位準(zhǔn)確度均隨著網(wǎng)絡(luò)連通度的增大逐漸提高,BBGMLE雖然存在最優(yōu)信標(biāo)選擇機(jī)制,但由于沒(méi)有擴(kuò)展卡爾曼濾波過(guò)程,當(dāng)通信半徑大于25 m時(shí)平均定位誤差反而增大。與其他三種算法相比BBG-EKF算法穩(wěn)定性最好,在網(wǎng)絡(luò)連通度變化的情況下,都具有較高的定位精度。
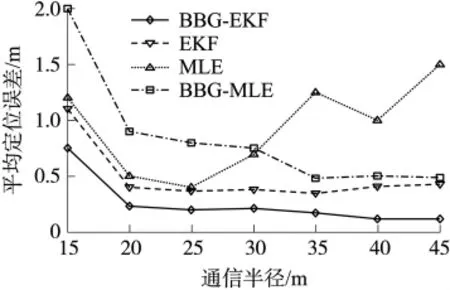
圖9 通信半徑與定位精度的關(guān)系
圖10是R=25時(shí)信標(biāo)節(jié)點(diǎn)密度對(duì)定位誤差的影響。平均定位誤差隨著信標(biāo)節(jié)點(diǎn)密度的增加而降低,在同樣信標(biāo)節(jié)點(diǎn)密度的情況下,BBG-EKF算法具有更好的定位性能,比如在信標(biāo)密度為15%時(shí),BBG-EKF算法平均定位誤差約為0.37 m,而EKF算法平均定位誤差約為0.52 m,BBG-MLE算法平均定位誤差約為1.42 m,MLE算法平均定位誤差約為0.98 m。另外,BBG-EKF對(duì)信標(biāo)節(jié)點(diǎn)密度要求不高,信標(biāo)節(jié)點(diǎn)密度為10%時(shí)算法平均定位誤差為0.6 m左右,所以,BBG-EKF不僅具有很好的定位效果,而且適用于信標(biāo)節(jié)點(diǎn)稀疏的環(huán)境中。
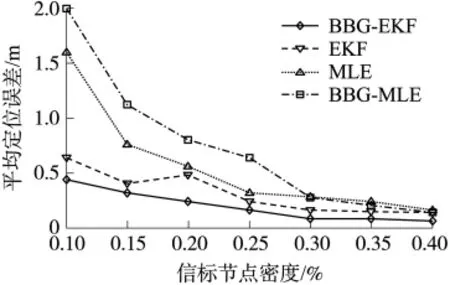
圖10 信標(biāo)節(jié)點(diǎn)密度與定位精度的關(guān)系
6 總結(jié)
本文采用無(wú)線傳感網(wǎng)中的RSSI測(cè)距技術(shù),提出一種基于最優(yōu)信標(biāo)組的擴(kuò)展卡爾曼定位算法(BBGEKF),該算法研究了未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)的距離、信標(biāo)節(jié)點(diǎn)的共線性對(duì)定位精度的影響,為合理選擇最優(yōu)信標(biāo)節(jié)點(diǎn)組進(jìn)行定位提供了一種方法,最后通過(guò)擴(kuò)展卡爾曼定位技術(shù)獲得未知節(jié)點(diǎn)的位置信息。仿真實(shí)驗(yàn)表明,本文提出的基于最優(yōu)信標(biāo)組的擴(kuò)展卡爾曼定位算法在沒(méi)有增加網(wǎng)絡(luò)開(kāi)銷的情況下,提高了定位精度,在不同通信半徑及信標(biāo)節(jié)點(diǎn)密度的網(wǎng)絡(luò)中都表現(xiàn)中良好的性能。
[1] 孫利民.無(wú)線傳感器網(wǎng)絡(luò)[M].北京:清華大學(xué)出版社,2005:137-140.
[2] Capkun S,Hamdi M,Hubaux J P.GPS-Free Positioning in Mobile Ad-Hoc Networks[J].Cluster Computing,2002,5(2):161 -176.
[3] Niculescu D,Nath B.Trajectory Based Forwarding and its Applications[C]//Proceedings of the 9th Annual International Conference on Mobile computing and Networking.ACM New York,NY,USA,2003:260-272.
[4] 劉新華,李方敏.一種分布式的無(wú)線傳感器網(wǎng)絡(luò)Range-free節(jié)點(diǎn)定位算法[J].傳感技術(shù)學(xué)報(bào),2008,21(1):154 -157.
[5] 田增山,羅磊,何維.一種分布式的無(wú)線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位算法[J].傳感技術(shù)學(xué)報(bào),2009,22(3):387 -390.
[6] Neal P,Joshua N,Spyros K,et al.Locating the Nodes:Cooperative Localization in Wireless Sensor Networks[J].IEEE Signal Processing Magazine,2005,22(4):54 -69.
[7] Mao G,F(xiàn)idan B,Anderson B.Wireless Sensor Network Localization Techniques[J].Computer Networks,2007,51(10):2529 -2553.
[8] 楊東勇,顧東袁,傅曉婕.一種基于RSSI相似度的室內(nèi)定位算法[J].傳感技術(shù)學(xué)報(bào),2009,22(2):264 -268.
[9] Yi J,Yang S.Multi-Hop Based Monte Carlo Localization for Mobile Sensor Networks[C]//Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor,Mesh and Ad Hoc Communications and Networks,San Diego,CA,2007:162 -171.
[10] Poqqi C,Mazzini G.Collinearity for Sensor Network Localization[C]//IEEE 58th Vehicular Technology Conference,F(xiàn)errara,IT,2003:3040-3044.
[11] Wang C L,Chiou Y S,Dai Y S.An Adaptive Location Estimator Based Kalman Filtering for Wireless Sensor Networks[C]//IEEE 65th Vehicular Technology Conference,Dublin,IR,2007:864 -868.
[12] Wang J,Ghosh R K.A Survey on Sensor Localization[J].Journal of Control Theory and Applications,2010,8(1):2 -11.
[13]吳凌飛,孟慶虎,梁華為.一種基于共線度的無(wú)線傳感器網(wǎng)絡(luò)定位算法[J].傳感技術(shù)學(xué)報(bào),2009,22(5):722 -727.
[14] Sreenath K,Lewis F L,Popa D O.Simultaneous Adaptive Localization of a Wireless Sensor Network[J].Mobile Computing and Communications Review,2007,11(2):14 -28.
[15] Yim J,Park C,Joo J.Extended Kalman Filter for Wireless LAN Based Indoor Positioning[J].Decision Support Systems,2008,45(4):960-971.
