一種用于無線傳感器網(wǎng)絡(luò)節(jié)點(diǎn)遞增式定位的新方法*
2011-01-02 03:59:22熊偉麗唐蒙娜徐保國
傳感技術(shù)學(xué)報(bào) 2011年4期
熊偉麗,唐蒙娜,徐保國
(江南大學(xué)輕工過程先進(jìn)控制教育部重點(diǎn)實(shí)驗(yàn)室,江蘇無錫214122)
無線傳感器網(wǎng)絡(luò)技術(shù)作為一種新的信息獲取和處理技術(shù),具備傳統(tǒng)技術(shù)不可比擬的優(yōu)勢,在軍事和民用領(lǐng)域擁有廣闊的應(yīng)用前景。正確的節(jié)點(diǎn)定位是無線傳感器網(wǎng)絡(luò)構(gòu)建和維護(hù)、監(jiān)測定位、目標(biāo)跟蹤等功能實(shí)現(xiàn)的前提和基礎(chǔ)[1]。目前用的較多的節(jié)點(diǎn)定位方法是最小二乘法、加權(quán)最小二乘法等,然而最小二乘法雖然考慮了參考節(jié)點(diǎn)的定位誤差,但沒有考慮到遞增式定位方法中不同級的參考節(jié)點(diǎn)定位誤差的不同[4-5];加權(quán)最小二乘法雖然考慮了各級參考節(jié)點(diǎn)的定位誤差的不同,但其權(quán)值的確定不能使節(jié)點(diǎn)定位達(dá)到最優(yōu)。
本文延續(xù)遞增式模型中不同級參考節(jié)點(diǎn)定位誤差不同的特點(diǎn),針對加權(quán)最小二乘法中權(quán)值選取的不足,提出最優(yōu)加權(quán)最小二乘法對該問題進(jìn)行改進(jìn),在估計(jì)誤差方差矩陣最小時(shí)取得最優(yōu)權(quán)值,最終得到最優(yōu)估計(jì)解。該方法能使節(jié)點(diǎn)的估計(jì)坐標(biāo)與真實(shí)坐標(biāo)間的誤差保持在一個(gè)較穩(wěn)定狀態(tài),同時(shí)也使誤差減小,確保后級節(jié)點(diǎn)定位的準(zhǔn)確性,盡量減小遞增誤差帶來的影響。仿真結(jié)果表明,最優(yōu)加權(quán)最小二乘在遞增式節(jié)點(diǎn)定位中具有明顯的優(yōu)越性。
1 遞增式定位與累積誤差的形成
按照節(jié)點(diǎn)定位的先后次序不同,定位方法可分為遞增式定位法與并發(fā)式定位法。并發(fā)式定位法中所有節(jié)點(diǎn)同時(shí)進(jìn)行位置計(jì)算,要求錨節(jié)點(diǎn)通信范圍較大,適用于小型傳感器網(wǎng)絡(luò)。當(dāng)網(wǎng)絡(luò)中節(jié)點(diǎn)較多、覆蓋范圍較廣時(shí)采用遞增式定位法較為合理[6-7]。為了降低成本,應(yīng)減小WSN中錨節(jié)點(diǎn)所占的比例,但同時(shí)也降低了定位節(jié)點(diǎn)覆蓋率。為了提高定位節(jié)點(diǎn)的覆蓋率,將已定位節(jié)點(diǎn)升級為參考節(jié)點(diǎn),利用參考節(jié)點(diǎn)迭代定位將定位節(jié)點(diǎn)的范圍逐步擴(kuò)展到整個(gè)網(wǎng)絡(luò),這就是遞增式定位法[8]。錨節(jié)點(diǎn)為能夠通過GPS直接定位的節(jié)點(diǎn)。
遞增式定位法引入了誤差累積的問題,參考節(jié)點(diǎn)本身可能存在較大的位置誤差,由于測距誤差和參考節(jié)點(diǎn)位置誤差同時(shí)作用,在下一輪的定位估計(jì)中引入了更大的誤差,當(dāng)網(wǎng)絡(luò)規(guī)模較大時(shí),誤差累積造成的位置誤差將不容忽視[2,9-10]。遞增式定位方法中,被定義為同一級節(jié)點(diǎn)的定位是同時(shí)進(jìn)行的。假設(shè)目標(biāo)節(jié)點(diǎn)與定位節(jié)點(diǎn)之間的距離已獲得,且測距誤差與距離有關(guān),建立一個(gè)模擬無線傳感器網(wǎng)絡(luò)來對遞增式定位中的累積誤差進(jìn)行分析[3,11]。圖 1 中,假設(shè) S1、S2、S3為錨節(jié)點(diǎn),節(jié)點(diǎn)A~E為待定位的未知節(jié)點(diǎn)。連線表示在通信范圍內(nèi)的節(jié)點(diǎn),圖中線段長度不代表距離。設(shè)錨節(jié)點(diǎn)為零級節(jié)點(diǎn),一級節(jié)點(diǎn)是指只由錨節(jié)點(diǎn)直接定位的節(jié)點(diǎn)A;只由一級節(jié)點(diǎn)定位或由錨節(jié)點(diǎn)和一級節(jié)點(diǎn)共同定位的節(jié)點(diǎn)C稱為二級節(jié)點(diǎn);以此類推,B、D為三級節(jié)點(diǎn),E為四級節(jié)點(diǎn)。假設(shè)錨節(jié)點(diǎn)定位無誤差,由前面提到的遞增模式可知,后級節(jié)點(diǎn)的定位誤差通常都大于其前級節(jié)點(diǎn),節(jié)點(diǎn)定位誤差隨著定位的逐級進(jìn)行呈現(xiàn)增大的趨勢。因此,各節(jié)點(diǎn)誤差大小關(guān)系為:S1、S2、S3<A <C <B、D <E。為了解決誤差累積問題,引入最優(yōu)加權(quán)最小二乘估計(jì)的方法,在最小二乘估計(jì)中加入最優(yōu)權(quán)值,使定位誤差方差達(dá)到最小,提高定位精度。
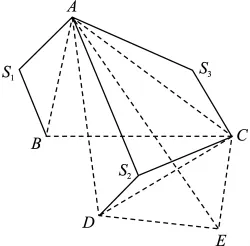
圖1 網(wǎng)絡(luò)中的節(jié)點(diǎn)
2 最優(yōu)加權(quán)最小二乘的節(jié)點(diǎn)定位方法
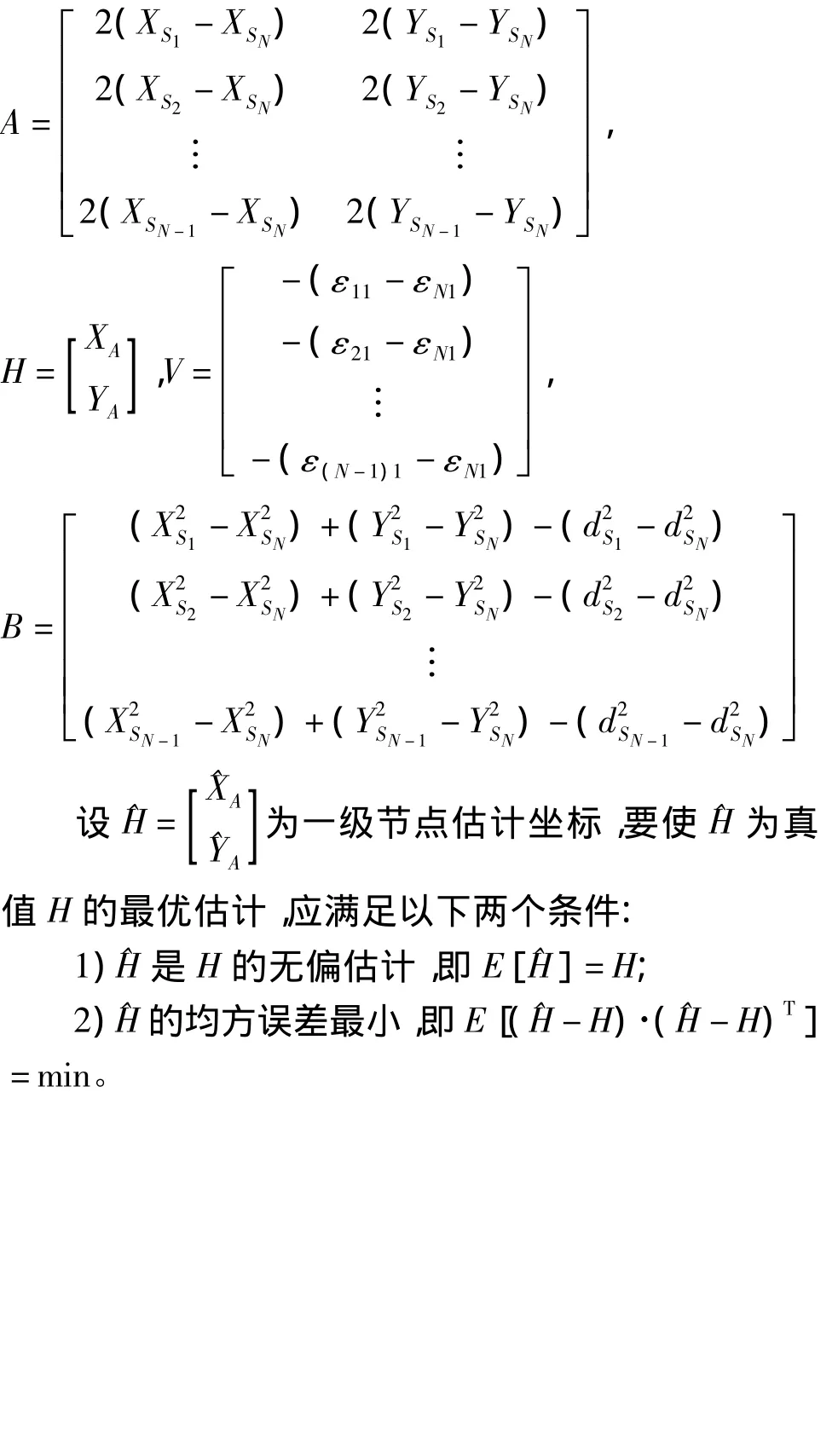
改進(jìn)的最優(yōu)加權(quán)最小二乘法相對于其他普通的加權(quán)最小二乘,不僅考慮了不同級節(jié)點(diǎn)誤差因子的差異,并在估計(jì)誤差的方差矩陣E[(-H)(-H)T]達(dá)到最小時(shí)取得權(quán)值,能使為真值H的最優(yōu)估計(jì)。下面分別對一級節(jié)點(diǎn)、二級及二級以上節(jié)點(diǎn)的定位進(jìn)行分析。
2.1 一級節(jié)點(diǎn)定位
在本段中,對無線傳感器節(jié)點(diǎn)定位算法進(jìn)行建模,列出方程,針對傳統(tǒng)的加權(quán)最小二乘法存在的估計(jì)有偏問題,列出使估計(jì)最優(yōu)的兩個(gè)條件,引入最優(yōu)加權(quán)最小二乘法,不僅得出對節(jié)點(diǎn)位置的最優(yōu)估計(jì),且此最優(yōu)估計(jì)無偏。
在實(shí)際無線傳感器網(wǎng)絡(luò)中,各級節(jié)點(diǎn)都可能有無數(shù)個(gè)。假設(shè)網(wǎng)絡(luò)中零級節(jié)點(diǎn)坐標(biāo)為Si(Xsi,Ysi),且不存在位置誤差,一級節(jié)點(diǎn)坐標(biāo)為A(XA,YA),測得待定位節(jié)點(diǎn)A到各零級節(jié)點(diǎn)的距離為dsi,其中測距誤差εi1與節(jié)點(diǎn)間距離成比例,獨(dú)立且服從方差為高斯分布,則可建立如下方程組:
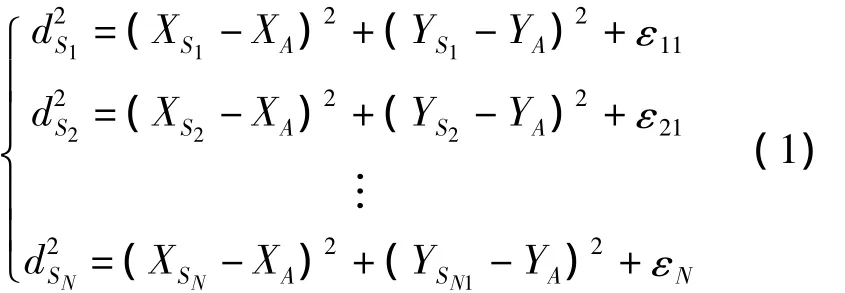
從方程組(1)的第一個(gè)方程開始分別減去最后一個(gè)方程,所得的方程組表示為矩陣形式:

式中:
本文針對上述問題提出最優(yōu)加權(quán)最小二乘法,其核心是找到最優(yōu)的權(quán)系數(shù)陣W,使其估計(jì)誤差的方差矩陣達(dá)到最小,并且為無偏估計(jì)。推導(dǎo)如下:
估計(jì)誤差為:
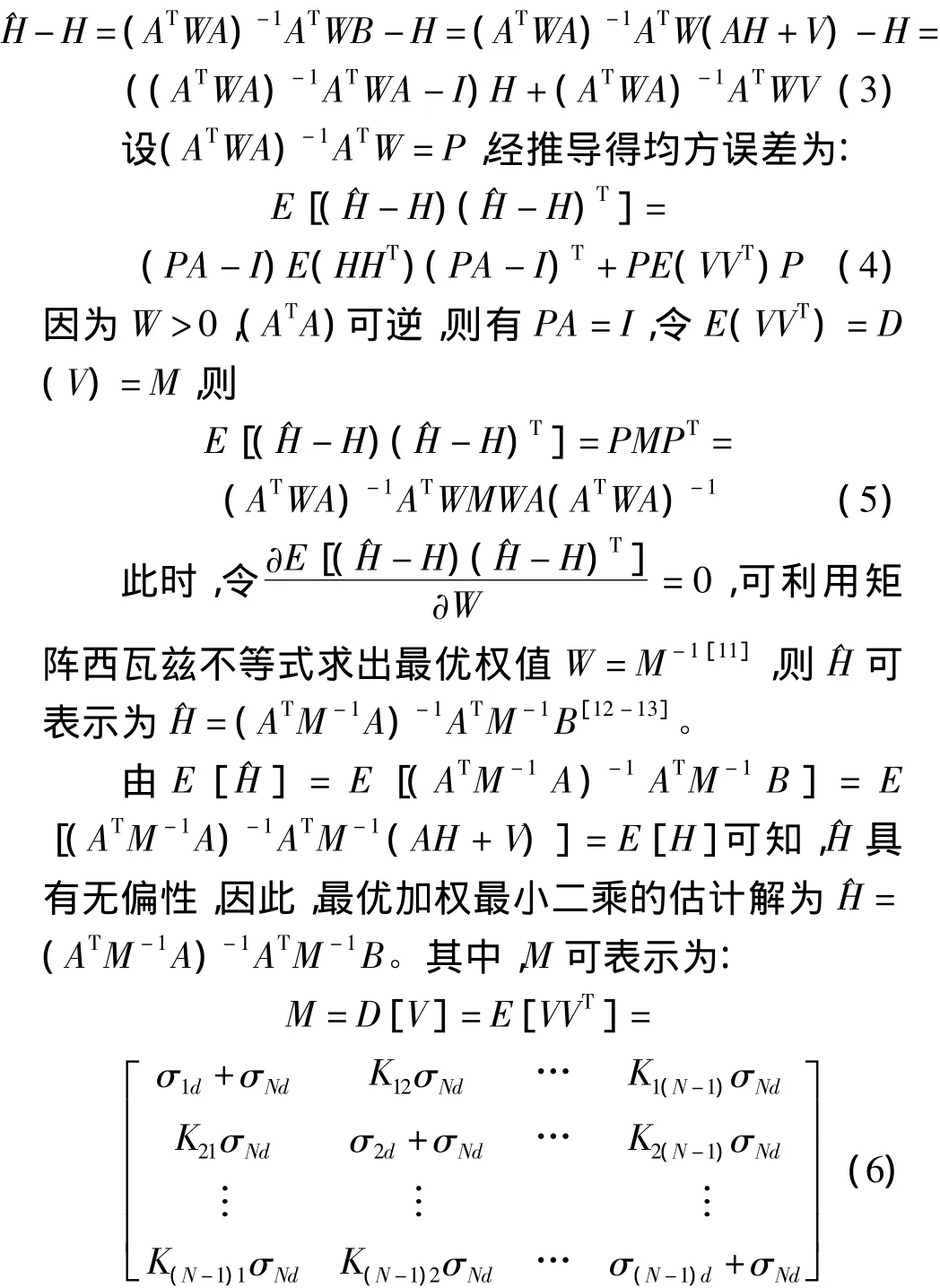
式中:Kij是相關(guān)系數(shù),由于各測距誤差不相關(guān),當(dāng)i≠j時(shí),Kij=0。
在一級節(jié)點(diǎn)的定位中,權(quán)值取值的不同主要取決于測距誤差的不同。上面計(jì)算的權(quán)值是在方程作差的基礎(chǔ)上取得的。因此,要了解各參考節(jié)點(diǎn)的權(quán)值,需再組建一個(gè)簡單方程組,經(jīng)過計(jì)算得到各節(jié)點(diǎn)的權(quán)值,且各權(quán)值略小于1。
2.2 二級及二級以上節(jié)點(diǎn)定位
由于無線傳感器節(jié)點(diǎn)間存在距離測量誤差,造成一級節(jié)點(diǎn)的定位有誤差,而這些存在誤差的節(jié)點(diǎn)將被后一級節(jié)點(diǎn)作為參考節(jié)點(diǎn)來對自身進(jìn)行定位。由于參考節(jié)點(diǎn)受本身的定位誤差和距離測量誤差的影響,后一級節(jié)點(diǎn)的定位誤差呈現(xiàn)增大的趨勢。要提高節(jié)點(diǎn)的定位精度,除了提高距離測量精度外,還需減小參考節(jié)點(diǎn)定位誤差的影響。
如圖1所示C為二級節(jié)點(diǎn),其參考節(jié)點(diǎn)包括兩個(gè)零級參考節(jié)點(diǎn)和一個(gè)一級節(jié)點(diǎn)。由于一級節(jié)點(diǎn)受距離測量誤差影響,其估計(jì)位置必然存在誤差,因此一級節(jié)點(diǎn)的定位誤差大于零級參考節(jié)點(diǎn)的定位誤差,根據(jù)不同節(jié)點(diǎn)對C節(jié)點(diǎn)精確定位的影響大小,賦予不同的權(quán)值。
對于二級及二級以上的節(jié)點(diǎn),其參考節(jié)點(diǎn)存在不同程度的定位誤差,設(shè)各參考節(jié)點(diǎn)定位誤差εi2符服從高斯分布,設(shè)其均值為零,方差為σ2il。由于測距誤差εi1也服從高斯分布,因此εi1+εi2仍服從高斯分布,方程組可表示為:
在定位級數(shù)為二級以及二級以上的待定位節(jié)點(diǎn)時(shí),由于參考節(jié)點(diǎn)可能是不同級的,而各級的定位精度不同,賦予的權(quán)值也各不同,甚至有較大差異。參考節(jié)點(diǎn)中,除了錨節(jié)點(diǎn)權(quán)值略小于1,而對于其它節(jié)點(diǎn),由于存在節(jié)點(diǎn)位置本身的定位誤差,其權(quán)值都小于1,且級數(shù)越高,其本身誤差越大,越不利于后級節(jié)點(diǎn)的正確定位,對應(yīng)的權(quán)值也越小。
3 誤差分析
當(dāng)只存在測距誤差,各級參考節(jié)點(diǎn)的定位誤差沒有顯著差別,即測距誤差對各級節(jié)點(diǎn)的影響大致相同;當(dāng)只存在參考節(jié)點(diǎn)定位誤差時(shí),后級節(jié)點(diǎn)的定位誤差明顯大于前級節(jié)點(diǎn)。在遞增式定位過程中,各級節(jié)點(diǎn)定位誤差來源于測距誤差與參考節(jié)點(diǎn)的定位誤差,因此存在嚴(yán)重的累積誤差,在相同測距誤差的情況下,累積誤差主要是由節(jié)點(diǎn)的定位誤差決定的,如圖2所示。
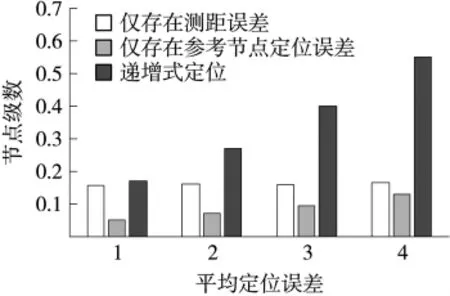
圖2 三種情況下的定位誤差對比圖
每條路徑的測距誤差與其路徑長度有關(guān),路徑最短的測距誤差服從獨(dú)立的高斯分布 N(0,σ2)。假設(shè)待定節(jié)點(diǎn)共K個(gè),第i個(gè)待定位節(jié)點(diǎn)的真實(shí)坐標(biāo)為(Xi,Yi),而根據(jù)本文所運(yùn)用的定位算法得到的定位坐標(biāo)為(i,i),i=0,1,2,…,K。定義節(jié)點(diǎn)定位誤差為節(jié)點(diǎn)的真實(shí)位置與估計(jì)位置間的距離與通信距離D之比各級節(jié)點(diǎn)平均定位誤差為同級節(jié)點(diǎn)定位誤差之和除以節(jié)點(diǎn)數(shù)。
本文利用的最優(yōu)加權(quán)最小二乘可以盡量減小累積誤差帶來的問題,通過計(jì)算給不同級節(jié)點(diǎn)引入了不同的權(quán)值,誤差越大的節(jié)點(diǎn)對正確定位越不利,相應(yīng)的權(quán)值就越小,并賦予了結(jié)果對誤差方差最優(yōu)的特點(diǎn)。下一節(jié)對改進(jìn)方法進(jìn)行仿真分析與對比。
4 仿真與對比
以100 m×100 m的正方形農(nóng)田為單位部署100個(gè)節(jié)點(diǎn),將節(jié)點(diǎn)射頻通信距離設(shè)為15 m,測距精度使用相對誤差表示,即誤差占射頻通信距離的比例,測距誤差服從高斯分布。部署于農(nóng)田中的無線傳感器節(jié)點(diǎn)的主要功能是采集節(jié)點(diǎn)周圍的土壤信息,如溫度、濕度及土壤緊實(shí)度等。
仿真階段必須選擇出合理的權(quán)值,使定位誤差達(dá)到最小。加權(quán)最小二乘法中,為了取得能使定位誤差達(dá)到相對小的權(quán)值,需多次取值進(jìn)行結(jié)果對比。最優(yōu)加權(quán)最小二乘法較加權(quán)二乘法的最大優(yōu)勢是權(quán)值能根據(jù)方差陣的逆陣來取得最高精度的估計(jì)值,結(jié)果同樣遵循級數(shù)越高,權(quán)值越小的原則。測距誤差增大時(shí),要達(dá)到最小定位誤差,權(quán)值有相應(yīng)的減小,但這種減小的趨勢不明顯,即測距誤差的影響不占主導(dǎo)作用,影響主要是由參考節(jié)點(diǎn)的位置誤差造成的。圖3為參考節(jié)點(diǎn)定位誤差ε的方差取不同值時(shí)的平均誤差圖。
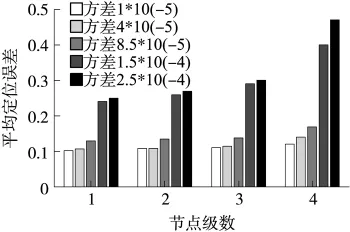
圖3 ε方差不同時(shí)各級節(jié)點(diǎn)平均定位誤差對比圖
由圖3可知,ε取不同值時(shí),各級節(jié)點(diǎn)平均定位誤差各不同。ε的方差越大,節(jié)點(diǎn)平均定位誤差也越大。在測距誤差為1%時(shí),由于測距誤差在距離的±1%間呈正態(tài)分布,因此其節(jié)點(diǎn)位置誤差也有變化。圖4是ε的方差一定時(shí),應(yīng)用最小二乘法、加權(quán)最小二乘法和最優(yōu)加權(quán)最小二乘法所得到的待定位節(jié)點(diǎn)誤差的對比圖。
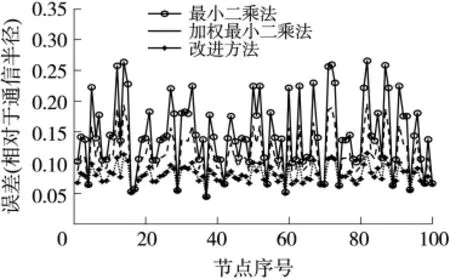
圖4 測量誤差一定時(shí)不同算法的誤差對比圖
從圖4中的對比可以看出,應(yīng)用最優(yōu)加權(quán)最小二乘法得到的定位誤差明顯低于最小二乘法和加權(quán)最小二乘法,對節(jié)點(diǎn)的正確定位具有有效的改進(jìn)作用。另外由圖可知,不管用何種方法,同一點(diǎn)處的定位誤差呈現(xiàn)相同的趨勢,即低級節(jié)點(diǎn)的定位誤差小于高級節(jié)點(diǎn),也驗(yàn)證了本文方法的正確性。
5 結(jié)束語
本文根據(jù)遞增式定位方法的特點(diǎn),提出最優(yōu)加權(quán)最小二乘的方法來改進(jìn)遞增式節(jié)點(diǎn)定位中的缺陷,通過不同測距誤差下定位誤差大小的對比,在一個(gè)相對最小的測距誤差下,運(yùn)用最優(yōu)加權(quán)最小二乘法與運(yùn)用其他定位方法進(jìn)行MATLAB仿真對比。從仿真結(jié)果可以看出,該方法能有效抑制無線傳感器定位迭代循環(huán)過程中誤差累積的影響,使遞增式節(jié)點(diǎn)定位方法能夠越來越廣泛的應(yīng)用于無線傳感器網(wǎng)絡(luò)的定位中。
[1] 曹曉梅,俞波.傳感器網(wǎng)絡(luò)節(jié)點(diǎn)定位系統(tǒng)安全性研究[J].軟件學(xué)報(bào),2008,9(4):869 -877.
[2] 王建剛,王福豹,段渭軍.加權(quán)最小二乘估計(jì)在無線傳感器網(wǎng)絡(luò)定位中的應(yīng)用[J].計(jì)算機(jī)應(yīng)用研究,2006,(9):41 -42.
[3] 嵇瑋瑋,劉中.遞增式傳感器節(jié)點(diǎn)定位方法的累積誤差分析及其改進(jìn)[J].南京理工大學(xué)學(xué)報(bào),2008,32(4):496 -501.
[4] 范偉軍,周必方,夏良正等.基于最小二乘法準(zhǔn)則的光學(xué)綜合孔徑觀測目標(biāo)傅里葉信息提取[J].光子學(xué)報(bào),2004,33(4):72-475.
[5] 包志華,周暉,邵世煌.基于智能估計(jì)的無線傳感器網(wǎng)絡(luò)定位算法[J].傳感技術(shù)學(xué)報(bào),2008,21(10):1755 -1769.
[6] Hwang S,Willians D B.A Constrained Total Least Square Approach for Sensor Position Calibration and Direction Finding[C]//Proc of the IEEE National Radar Conference.USA,1994:155 -159.
[7] Huang Z,Lu J.Total Least Square and Equilibration Algorithm for Range Difference Location[J].Electronics Letter,2004,40(5):121 -122.
[8] Savvides A,Han C C,Srivastava M B.Dynamic Fine-Grained Localization in Ad-Hoc Networks of Sensors[C]//Proc of 7th Annual International Conf on Mobile Computing and Networking(MobiCom).USA,2001:166-179.
[9] 魏葉華,李仁發(fā),羅娟,等.基于支持向量回歸的無線傳感網(wǎng)絡(luò)定位算法[J].通信學(xué)報(bào),2009,30(10):44 -50.
[10]黃浩,盧文科.無線傳感器網(wǎng)絡(luò)中基于錨節(jié)點(diǎn)反饋的多跳測距定位算法改進(jìn)[J].傳感技術(shù)學(xué)報(bào),2009,22(2):269 -272.
[11] C K Chui,G Chen.Kalman Filtering with Real-Time Applications[M].Springer-Verlag,1987.
[12] CostaJ A,Patwari N,Hero A O.Distributed Weighted Multidimensional Scaling for Node Localization in Sensor Networks[J].ACM Transactions on Sensor Networks,2006,2(1):1 -26.
[13] Niculescu D,Nath B.DV Based Positioning in Ad Hoc Networks[J].Telecommunication systems-Modeling,Analysis,Design and Management,2003,22(1/4):267 -280.
