大磁矩磁力矩器驅動電路的一種設計方案
2010-12-11 08:00:59范佳堃王友平崔赪旻
空間控制技術與應用 2010年2期
關鍵詞:信號
范佳堃,王友平,崔赪旻
(北京控制工程研究所,北京 100190)
大磁矩磁力矩器驅動電路的一種設計方案
范佳堃,王友平,崔赪旻
(北京控制工程研究所,北京 100190)
研究了一種1500~2000 A·m2的大磁矩磁力矩器的驅動電路設計方案.電路主要采用脈寬調制+H橋驅動的形式,根據輸入信號的不同,輸出的激磁電流呈線性變化.針對大磁矩磁力矩器電氣參數的特點,建立簡化電氣模型,確定電氣參數值,并提出抑制剩磁矩的方法和使用中的注意事項.該電路功耗小,控制方式簡單,通常與大磁矩磁力矩器一同用于大型航天器的姿態控制.
大磁矩磁力矩器;驅動電路;脈寬調制+H橋驅動
磁力矩器是航天器的執行部件之一,由磁力矩器本體和為其提供特定激磁電流的驅動電路組成.由于磁力矩器在體積、質量、功耗、壽命等方面具有優勢,加上地磁模型的完善,剩磁補償、星載計算機軟件算法及主動磁控技術的發展,使磁力矩器在航天器姿態控制方面得到了廣泛應用,且在航天器控制工程中磁控技術也取得了一定的進展.目前國際上使用的磁力矩器輸出的最大磁矩通常為5~1 000 A·m2[1-3].國內磁力矩器已從幾十A·m2發展到幾千A·m2,在軌使用的磁力矩器輸出的最大磁矩為400 A·m2.隨著中國航天事業的發展,特別是空間站的組建,大型航天器的研制勢在必行.大型航天器由于體積結構龐大、姿態機動能力要求較高,因此對動量交換執行機構有較大的動量要求,對磁力矩器同樣有較大的動量卸載要求,也就是對磁力矩器輸出的最大磁矩有了更高的要求.本文提到的大磁矩磁力矩器是指輸出的最大磁矩在1 500~2 000 A·m2的磁力矩器.
磁力矩器驅動電路的功能是為磁力矩器提供特定的激磁電流,使磁力矩器輸出特定的磁矩.驅動電路形式與控制系統的方案有關,目前驅動電路的形式主要有兩種:一種為開關形式(輸出的激磁電流是一恒定值或為0),磁力矩器輸出的磁矩為確定值;一種為線性形式(輸出的激磁電流在一定范圍內根據控制信號幅值的不同呈線性變化),磁力矩器輸出的磁矩線性可控[3-4].
1 磁力矩器的電氣模型
磁力矩器的主體通常是一根圓柱形的軟磁芯棒,在芯棒上纏繞一定匝數的漆包圓銅線[4-5],根據輸出磁矩的大小,確定繞線的層數及每層繞線的匝數.芯棒上纏繞的漆包圓銅線之間存在分布電容,在通電的情況下產生電感,且導線上也必不可少的存在損耗電阻.由于分布電容既存在于同層的相鄰繞線間,也存在于不同層的相鄰繞線間,導致磁力矩器的電氣模型比較復雜.假設繞線一共有N層,每一層有n匝,每層相鄰兩匝線圈間的分布電容為xi,層與層間相鄰兩匝線圈間的分布電容為ki,如圖1所示,其中“A-A”為垂直于軟磁芯棒軸向的任意剖面.圖2為磁力矩器的等效電氣模型[6].
圖1 磁力矩器分布電容示意圖
圖2 磁力矩器等效電氣模型

圖3 磁力矩器的簡化電氣模型
首先根據磁力矩器的材料、外形尺寸、漆包圓銅線的規格、纏繞方式等確定磁力矩器的電感量L和損耗電阻R,然后在簡化模型的基礎上,通過諧振法確定分布電容C.
2 驅動電路方案
由于大磁矩磁力矩器輸出的最大磁矩在1 500~2 000 A·m2,如果驅動電路采用開關形式,那么磁力矩器將對航天器產生一個不小的擾動,且姿態控制精度明顯降低.驅動電路如采用線性形式可以有效解決以上問題.
由于大磁矩磁力矩器工作時需要的工作電壓較高,且驅動電路需要采用線性形式,所以為降低驅動電路的功耗,電路采用脈寬調制(PWM)的方式.利用磁力矩器的電感特性(通過它的電流不能突變)來實現通過改變PWM電路的占空比來控制磁力矩器上電流的變化,實現磁矩線性可控.假設輸出磁矩為m、激磁電流為i、PWM電路的占空比為d、磁矩控制信號為u,那么有以下的關系:

式中,k1、k2、k3為比例因子,數值由驅動電路本身決定,為此磁矩的大小只取決于磁矩控制信號的大小,并具有一定的線性關系.
磁矩的方向通過H橋電路進行控制.整個磁力矩器驅動電路采用脈寬調制+H橋驅動的形式.
3 驅動電路的設計
3.1驅動電路的對外接口
驅動電路與星載計算機、負載(磁力矩器)、星上電源及遙控系統之間的接口關系如圖4所示.圖中:星上電源為驅動電路供電;星載計算機為驅動電路提供磁矩控制信號,此信號通常為-5~+5V的電壓模擬量;磁力矩器為被驅動負載;遙控系統用于接收驅動電路輸出的遙測信號,用來反映激磁電流的狀態.
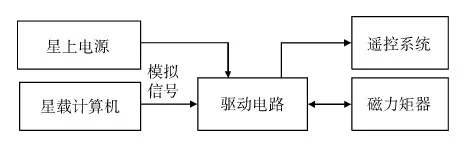
圖4 驅動電路對外接口圖
3.2驅動電路參數的確定
驅動電路的參數要根據負載特性及工作模式確定.由式(2)可以計算出磁力矩器工作時所需要的最大激磁電流I.
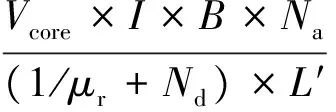
(2)
式中:M為最大磁矩;Vcore為軟磁芯棒體積;I為最大激磁電流;Na為衰減系數;B為線圈總匝數;μr為軟磁芯棒材料的相對導磁率;Nd為去磁因子;L′為繞線的有效長度.
驅動電路使用到的電源主要包括邏輯電路和基準電路要用到的邏輯電源(電壓值為±12V或±15V)及為磁力矩器提供電流的驅動電源U,由于航天器提供的一次母線電壓值一定,驅動電路要通過DC-DC變換器將其轉換為所需要的二次電源.驅動電源U的電壓值可以通過式(3)進行確定.
U=I×R+a
(3)
式中,a為常數,取值在5~10 V,用于驅動電路上的損耗.
PWM的開關頻率f主要取決于對激磁電流品質的要求和電路中元器件的性能.從電流平穩性的角度出發,希望f越高越好,這樣漆包圓銅線上的瞬時電流值更接近所期望的電流值.但是f不能高于電路正常工作所能允許的最高頻率.而最高頻率是由電路中使用的元器件的工作頻率決定的.
3.3電路組成及原理
驅動電路的原理框圖如圖5所示,其組成如下.
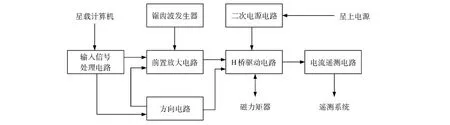
圖5 驅動電路原理框圖
(1)二次電源電路
二次電源電路主要由前置級電路和變換器電路組成.前置級電路的主要功能是提供輸入端的過流保護,減小二次電源對航天器一次母線的干擾,為變換器提供相應的電源.變換器電路采用雙管正激變換器拓撲電路,其功能是將一次母線轉換成特定的二次電源,為驅動電路提供邏輯電源和驅動電源.
(2)鋸齒波發生器
鋸齒波發生器的主要功能是提供與磁矩控制信號相比較的波形.
(3)輸入信號處理電路
輸入信號處理電路主要由1個反相器和1個射極跟隨器組成,其功能是將-5~+5V的磁矩控制信號轉換為單一方向的-5~0V的控制信號,并將此信號輸出到前置放大電路,通過與鋸齒波的比較進行脈寬調制,從而調整驅動電路輸出的激磁電流的大小.
(4)前置放大電路
前置放大電路的功能是控制H橋電路中兩個上橋臂工作在PWM狀態下的占空比.電路采用比例積分(PI)的形式,并以差分方式引入激磁電流負反饋,以保證磁力矩器電流穩定,從而保證磁力矩器輸出磁矩的穩定.
(5)方向電路
方向電路采用過零比較器電路,目的是根據磁矩控制信號方向的不同,將-5~+5V的電壓模擬量信號轉換為一個邏輯電平信號.此信號的狀態將決定H橋電路的導通方向.從式(2)可以看出,磁矩的方向只取決于激磁電流的方向,即通過控制H橋電路電流導通方向可以改變磁矩方向.
(6)H橋電路
H橋電路的示意圖如圖6所示.H橋電路的導通狀態由方向電路控制,處于工作狀態的兩個功率管如V1和V4,其中下橋臂上的功率管V4處于常導通的狀態,上橋臂上的功率管V1處于PWM的狀態.整流二極管Z3和Z4的作用是在上橋臂的功率管V1處于截止狀態時進行續流,在設計上對橋臂的控制信號加入死區以防止發生上下橋臂對通的現象.
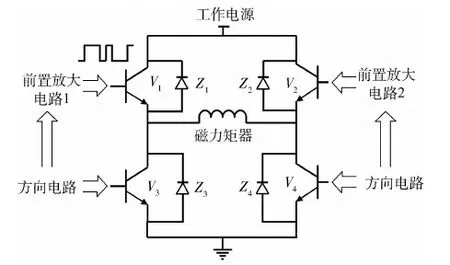
圖6 H橋電路的示意圖
(7)遙測電路
遙測電路的功能是反映驅動電路輸出的激磁電流的大小和方向,通常為0~5V的電壓模擬量,且要求與激磁電流具有一定的對應關系.
4 注意事項
大磁矩磁力矩器驅動電路,由于其負載的特殊性和復雜性,在設計和使用中均有值得關注的方面.
4.1電磁兼容性
為降低驅動電路的功耗,驅動電路采用了PWM的方式調整激磁電流的大小,同時,驅動電路中的二次電源電路也具有工作頻率,該工作頻率要根據PWM的頻率加以確定,避免電磁干擾.在此基礎上,還可以通過在DC-DC變換器電路和PWM電路間實現空間隔離(如增加金屬隔板)、在DC-DC變換器電路和PWM電路間的連接處增加濾波電路、在離IC芯片電源及輸入端管腳盡可能近的地方放置去耦電容等方法降低電磁干擾對電路性能的影響.
4.2反電勢的消除及電路保護
大磁矩磁力矩器的電感量很大,在關閉時會產生很大的反電勢.為消除反電勢,驅動電路中應設計續流回路[7].續流回路的形式有很多種,要根據控制系統對響應時間的要求以及驅動電路自身的特點,進行有針對性的設計.
4.3剩磁矩的抑制
剩磁矩是用零輸入時的磁矩占最大磁矩的百分比來定義的,其大小也是衡量磁力矩器性能的重要指標,有效抑制剩磁矩的大小可以減小磁力矩器對航天器姿態的擾動[8].如果控制系統要求磁力矩器的剩磁矩很小或近似為0,那么驅動電路設計中要采用消磁電路,以保證零輸入時,剩磁矩可以滿足控制系統的要求.
這里介紹兩種抑制剩磁矩的方法.一種是對磁力矩器的輸出磁矩采用閉環控制方法,在控制線路中增加霍爾傳感器網絡,利用該網絡將磁力矩器產生磁場的磁感應強度轉換為電壓信號,經反饋與磁矩控制信號共同控制驅動電路,其原理框圖如圖7所示.這種方法的優點是控制精度高,缺點是驅動電路結構過于復雜[4].一般磁力矩器的剩磁矩的大小為一固定值,主要取決于磁芯棒材料的磁性能,另一種方法就是基于剩磁矩的這個特點,先對剩磁矩的大小進行標定,再將標定值作為磁矩控制信號為零時,磁力矩器輸出磁矩的固定偏差,通過驅動電路對此偏差進行校正.確保在磁矩控制信號為零時,驅動電路輸出的激磁電流可以使磁力矩器產生一個與剩磁矩大小相等方向相反的磁矩.該方法簡單、易實現,但精度不如前一種方法.
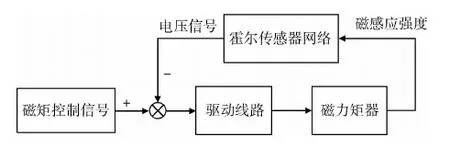
圖7 磁矩閉環控制電路原理框圖
4.4使用方法
大磁矩磁力矩器不僅電感量很大,在輸出最大磁矩時,自身的功耗也很大,針對各種不同的工作模式,要明確其使用方法,以避免錯誤的使用對驅動電路造成損壞,影響其性能指標.使用要求主要體現在以下幾個方面.
1)磁矩控制信號不能直接換向,應該采用過零的控制方式.因為如果磁矩控制信號直接換向,驅動電路將會對驅動電源產生充電現象,使驅動電源的電壓值升高,電壓升高的幅度取決于換向前激磁電流的大小.由于大磁矩磁力矩器電感量過大,在磁矩控制信號直接換向時,磁力矩器釋放出大量的能量,使驅動電源電壓值大幅升高,極易造成驅動電源的損壞.
2)在加電時應遵循先加一次電源,再從零逐步調節磁矩控制信號;斷電時應遵循先將磁矩控制信號逐步調整到零,再斷一次電源.避免磁矩控制信號的絕對值較大時,直接接通或斷開一次母線對飛行器的姿態產生較大的擾動.
3)如果驅動電路有備份且負載(磁力矩器)沒有備份,那么主備份電路在切換前應將磁矩控制信號逐步調整到零,再進行切換.目的是防止主備份電路串電,導致出現主備份電路均失效的現象.
5 結 論
大磁矩磁力矩器有著廣泛的應用前景,并有磁矩不斷增大的趨勢.圍繞著如何驅動這個功率部件目前國內已開始了一些研究.本文針對大磁矩磁力矩器電氣參數的特點,提出其驅動電路的一種設計思路和原理實現方法,電路主要采用脈寬調制+H橋驅動的形式.該電路功耗小,控制方式簡單,通常與大磁矩磁力矩器一同用于大型航天器的姿態控制.
[1] 屠善澄.衛星姿態動力學與控制(4)[M].北京:宇航出版社,2006,400-406
[2] 黃福銘.航天器飛行控制與仿真[M].北京:國防工業出版社,2004,37-38
[3] 鄭育紅,王平.一種用磁力矩器控制衛星姿態的新方法[J].宇航學報,2000,21(3):94-99
[4] 孔慶松,趙光恒.磁力矩器反饋控制電路設計與仿真[J].計算機仿真,2007,24(1):29-31
[5] 易忠,袁勝華.衛星強磁場干擾分析[J].航天器環境工程,2005,22(2):77-80
[6] 蔡圣清,周玉慧.分布電容對變壓器內參數影響不可忽略性分析[J].陜西理工學院學報(自然科學版),2008,24(4):30-32
[7] 李保軍.全數字智能控制系統在磁力吊車上的應用[D].武漢科技大學,2006
[8] 李楊,涂歆瀅.星體剩磁矩對姿控系統影響的仿真研究[J].系統仿真學報,2002,14(2):215-218
ADesignMethodofLarge-Magnetic-TorquerDriveCircuit
FAN Jiakun, WANG Youping, CUI Chengmin
(BeijingInstituteofControlEngineering,Beijing100190,China)
The paper investigates the design skills and principle of a large-magnetic-torquer drive circuit, adopting pulse width modulation and H-bridge.The drive circuit can output linear-current with analog input signal.According to the characteristics of the large-magnetic-torquer electric parameters, a simple electric model is established and a method for determining electric parameters is presented.Also methods for eliminating the remanence and remarks of the circuit application are proposed.This kind of circuit is usually used in the attitude control systems of large spacecrafts with large-magnetic-torquer, and has been validated to be low-consumption and easy-controlled.
large-magnetic-torquer; drive circuit; pulse width modulation and H bridge
2009-04-26
范佳堃(1977—),女,哈爾濱人,工程師,研究方向為航天器執行結構驅動電路(e-mail:fjkzy1530@sina.com).
TH133,V448.22
A
1674-1579(2010)02-0058-05
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06