受水黽啟發水上行走機器人控制系統開發
2010-10-22 06:59:36高鐵紅楊世忠薛永紅
河北工業大學學報 2010年5期
李 蕊,高鐵紅,楊世忠,薛永紅
(河北工業大學 機械工程學院,天津 300130)
水黽依靠其腿表面特殊結構在水面上停留并能快速滑行或跳躍.水上行走機器人以其效率高、機動性好、噪音低、對環境擾動小的優勢將在軍事偵察、環境監測、水體檢測、地下管網檢測等軍事和民用方面得到廣泛應用.因此,開展水上行走機器人的研究將具有重要的理論意義和實際應用價值.美國麻省理工大學、日本東京工業大學、日本工學院大學和中科院化學所有機固體院水黽的潛在運動機理和疏水特性進行了研究探討,并取得了一定的研究成果[1-4].美國麻省理工學院(MIT)、卡內基梅隆大學、哥倫比亞大學、日本的中央大學、日本工學院大學工學部和河北工業大學的學者都對水面行走機器人進行了研究,制作出樣機,取得了一定研究成果[5-9].本文研究一種依靠浮力停留在水面的水上行走機器人.該機器人前后4條腿采用漂浮原理支撐,兩中間腿模仿水黽腿劃水姿態產生劃水動作,使機器人具有良好的負載能力和較快的移動速度;該機器人突破傳統電機驅動,采用微型電磁鐵驅動.本文是在上述研究基礎之上,進行水上行走機器人遙控控制系統開發,并在實驗室環境下進行機器人運動實驗研究.
1 水黽
水黽(Water Strider)是一種在湖水、池塘、水田和濕地中常見的小型水生昆蟲.在垂直水面上,水黽腿不刺破水面對水面產生壓水作用,形成橢圓形軌跡.
2 水上行走機器人
根據功能仿生原理,在研究仿生原型水黽結構及運動特性基礎上,模仿水黽六條腿結構布局和兩中間腿做劃水運動進行水面滑行的運動機理,構建微小型水上行走機器人,如圖1所示.該機器人以電磁鐵二元邏輯控制替代電機復雜伺服驅動,其具有驅動數量少、結構簡單、易微小型化、機動性好、轉彎靈活、劃水效率高、控制簡單等特點.
3 水上行走機器人控制系統
該機器人的控制系統采用遙控操作,總體結構框圖如圖2所示.該控制系統主要內容包括硬件部分搭建和軟件部分設計,根據系統要求,搭建一個基于AT89C51單片機[10]的主運動控制系統.
3.1 控制系統硬件部分
水上行走機器人控制系統硬件部分包括遙控器部件和機器人的接收遙控信號的控制系統硬件.
系統的硬件主要由信號輸入模塊,主控模塊,驅動執行模塊等組成.其中信號輸入部分由遙控通訊發射部分——TX100ASK模塊和接收部分——RX100ASK模塊完成,兩模塊按照串口規則通訊.其中遙控發射部分為按鍵電路、編碼控制模塊、發射模塊等,是遙控器的一部分;接收部分為接收模塊、編碼控制模塊、邏輯部分和執行部分,屬機器人運動驅動的執行部件;用戶通過按鍵輸入信息,發射部分將信號傳輸給接收模塊,再通過主控模塊將信號發送給被控對象,從而實現遙控通訊技術控制終端.主控模塊采用AT89C51單片機作為控制核心,在自動運行時當AT89C51單片機接收到遙控信號輸入時,AT89C51單片機自動控制電磁鐵的通斷電.驅動執行模塊包括3個電磁鐵,通過電磁鐵的通斷電的配合來完成機器人腿部的劃水動作,從而使機器人能夠實現前進,左轉,右轉等運動.
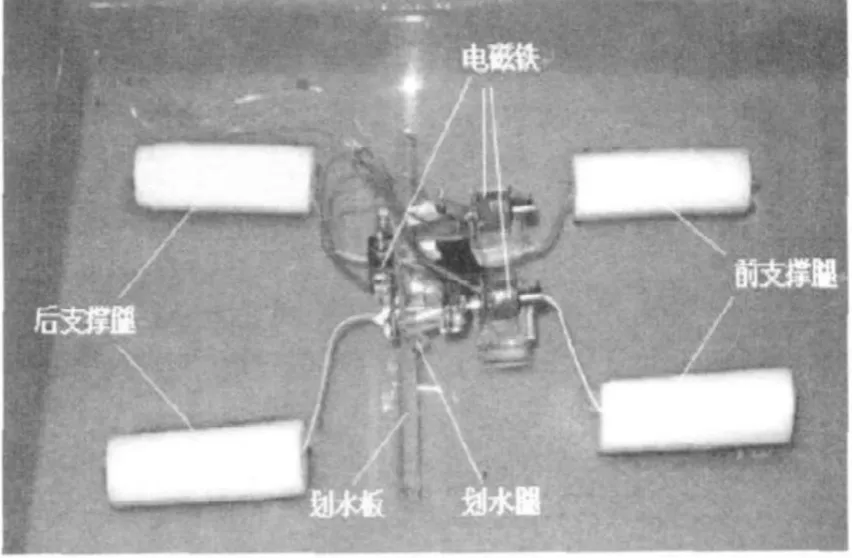
圖1 水上行走機器人Fig.1 The water-walking robot
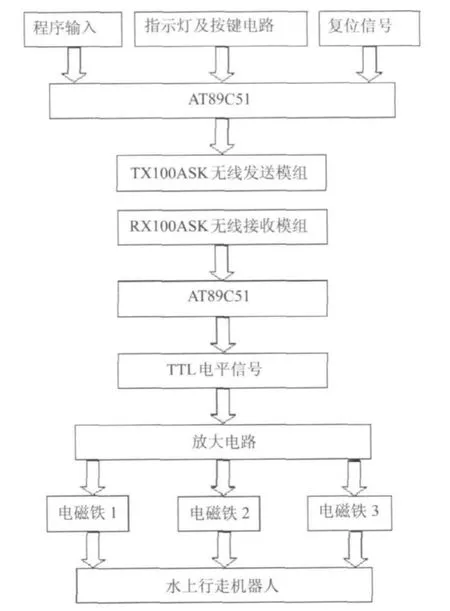
圖2 控制系統總體結構框圖Fig.2 The overall diagram of the control system
3.2 控制系統軟件部分
根據水上行走機器人運動控制方案,設計運動控制軟件系統.控制系統軟件部分主要包括主程序和子程序.主程序完成系統參數初始化、循環檢測外部控制信號、消抖處理和調用相應子程序的功能;動作子程序包括前進、左轉和右轉3個子程序,控制電磁鐵的通斷電時間和動作順序.主程序流程圖如圖3所示.左轉彎動作子程序流程圖如圖4所示.
4 水上行走機器人實驗研究
在設計了遙控控制系統基礎上,重新制作水上行走機器人,在實驗室環境下,進行水上行走機器人在水面上前行、轉彎實驗,如圖5所示.實驗表明,該機器人可以實現前進、轉彎等運動,具有良好的速度響應特性、運動靈活性,劃水效率高、控制簡單方便.
5 結論
本文進行了水上行走機器人控制系統開發,以AT89C51單片機為核心芯片并添加遙控通訊功能,設計遙控通訊技術控制終端,使機器人能夠實現前進,左轉,右轉等運動.研究水上行走機器人的長遠目標是可以實現機器人獨立在遠距離水面等環境下自主工作.由于實現遙控操作,本機器人更適合應用于要求本身承載能力強的場合,如環境監測、軍事偵察等,適合在人類不適合達到的區域工作.因此,開展水上行走機器人的研究不僅具有重要的科學意義而且將在軍用和民用上具有非常廣闊的應用前景.
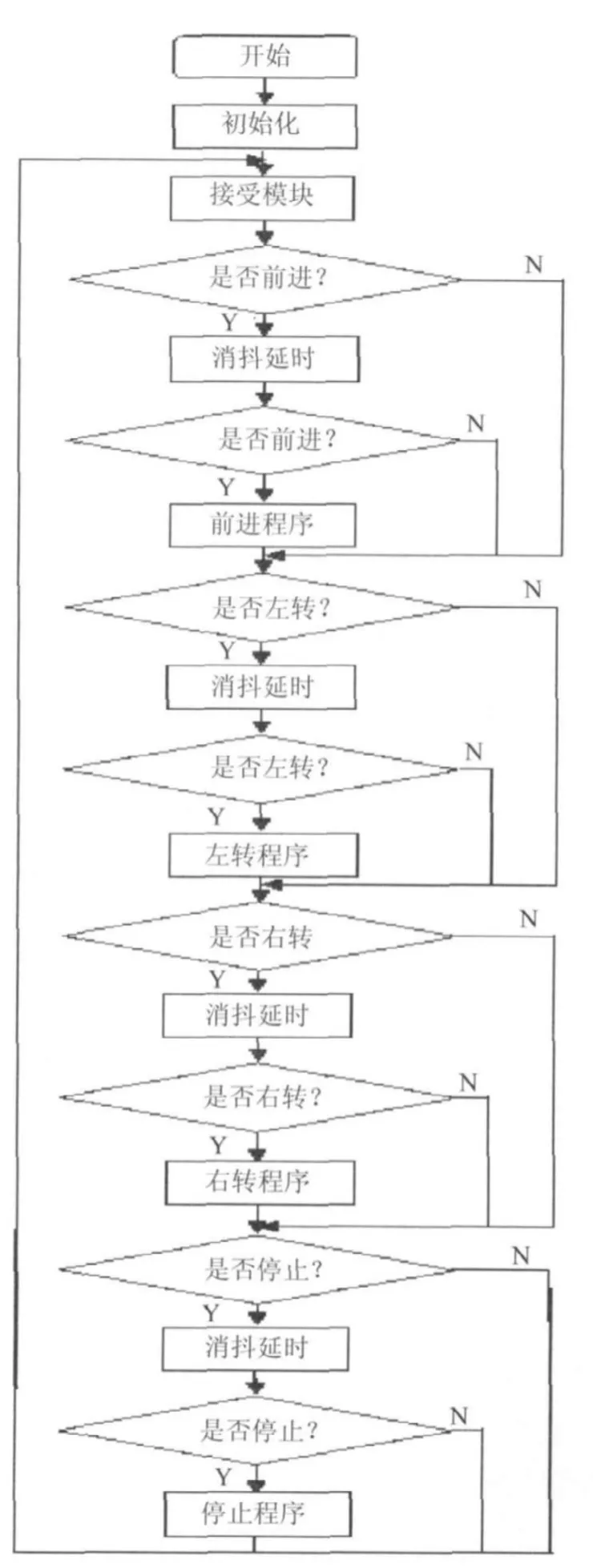
圖3 主程序流程圖Fig.3 The main program flow chart
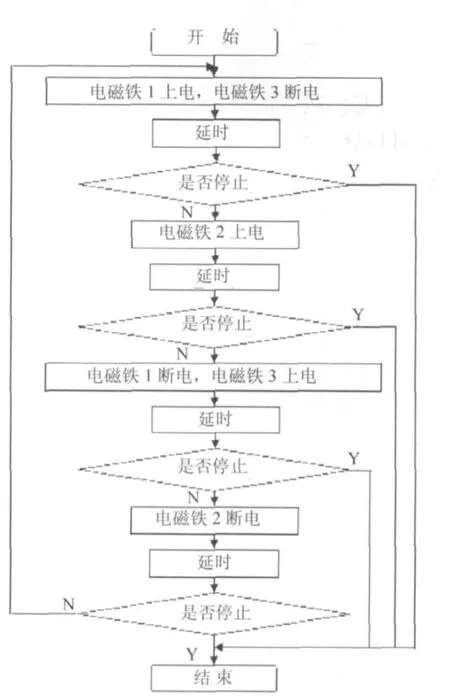
圖4 水上行走機器人水上實驗Fig.4 The water experiment of the water-walking robot
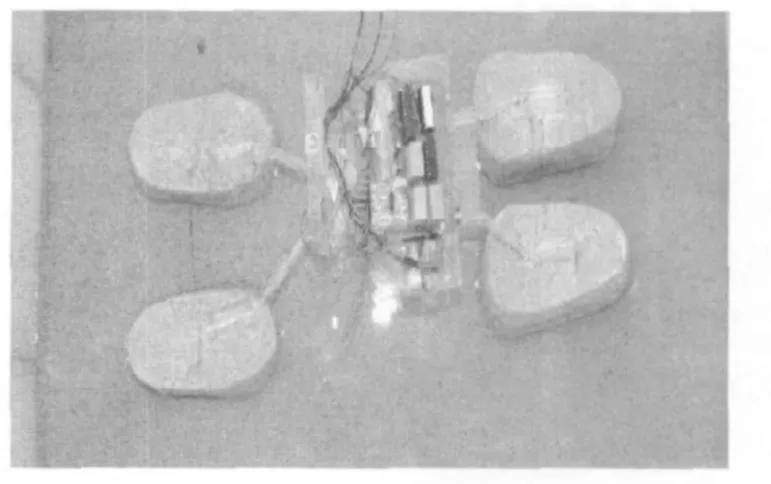
圖5 水上行走機器人水上實驗Fig.5 The water experiment of the water-walking robot
[1]Bush,John W M,David L Hu,et al.The hydrodynamics of water strider locomotion[J].Nature,2003(424):663-666.
[2]Takashi Yabe,Kazuya Chinda,Tomohiro Hiraishi.Computation of surface tension and contact angle and its application to water strider[J].Computers &Fluids,2007,36:184-190.
[3]髙信英明,小平圭佑,竹田ひとみ.アメンボの腳構造をモデルとしたロボットの基礎研究 [EB/OL].http://kiko.mech.kogakuin.ac.jp.
[4]高雪峰,江雷.天然超疏水生物表面研究的新進展 [J].物理,2006,35(7):559-564.
[5]Bush J,Hu D.Walking on Water:Biolocomotion at the Interface[J].Annu Rev of Fluid Mech,2006,38:339-369.
[6]Suhr SH,SongY S,Lee SJ,et al.Biologically inspired minature water strider robot[A].Proceedings of the Robotics:Science and Systems I[C].2005:319-325.
[7]Girard.Design review#1:water strider[Z].Columbia University,2005.2.
[8]Hideaki TAKANOBU,Jun YAMANAKA,et al.Development of Robot Based on Water strider[EB/OL].http://kiko.mech.kogakuin.ac.jp.
[9]高鐵紅.仿水黽機器人機構及性能分析 [D].天津:河北工業大學,2008.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
電子制作(2019年13期)2020-01-14 03:15:28
科技傳播(2019年22期)2020-01-14 03:06:54
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年12期)2018-08-01 00:48:04
汽車工程學報(2017年2期)2017-07-05 08:13:02