船載測控雷達無塔角度標校新方法
2010-09-26 01:22:32
電訊技術 2010年12期
關鍵詞:信號
(中國衛星海上測控部,江蘇 江陰 214434)
1 引 言
大型船載精密測控雷達系統跟蹤接收機的方位、俯仰交叉耦合及定向靈敏度的精確標定,是保證雷達完成目標捕獲及穩定跟蹤的必要前提。為了確保海上測控任務中船載測控雷達系統能捕獲目標并具有良好的跟蹤性能,船載測控雷達跟蹤接收機系統方位、俯仰必須具有良好的拉偏線性度,即方位、俯仰的交叉耦合度要小,且方位、俯仰定向靈敏度大小在合適范圍,這就必須對跟蹤接收機進行角度標校[1]。船載測控天線跟蹤接收機無塔動態角度標校有多種方法,目前提出的副面饋電角度標校法是一種利用在天線副反射面增加多個下行信號耦合器模擬信號相對于饋源喇叭形成方位、俯仰正反偏置從而實現角度標校的方法。該方法得以實現的前提是在副面安裝的信號耦合器必須精確定位,但在實際工程運用中由于天線實際安裝時副面與饋源喇叭的空間幾何位置較理論設計存在不同程度的偏差,因此耦合器精確定位相當困難。基于這些矛盾,本文提出了一種特殊情況下的副面饋電角度標校理論,通過在天線副反射面任意位置設置信號耦合器來模擬目標完成天線單點頻無塔動態角度標校,并采用查表法及自動校相輔助法等方法完成雷達工作頻段內不同頻點的角度標校。
2 角度標校原理
為確保船載測控天線(本文僅研究雙通道單脈沖跟蹤體制天線)能夠及時捕獲并穩定跟蹤目標,必須對天線跟蹤接收機的和、差鏈路相位及增益進行調整和標定,使接收機和、差鏈路的傳輸相位差ΔΦ=0°,且鏈路增益K為一合適的值,即接收機角度標校。
雙通道單脈沖跟蹤體制的天線跟蹤工作原理如圖1所示,當天線電軸偏離目標θ角時,天線饋源將產生差模信號經跟蹤接收機解調出方位、俯仰誤差電壓,將誤差電壓送伺服跟蹤位置環完成對空間目標的閉環跟蹤[2]。
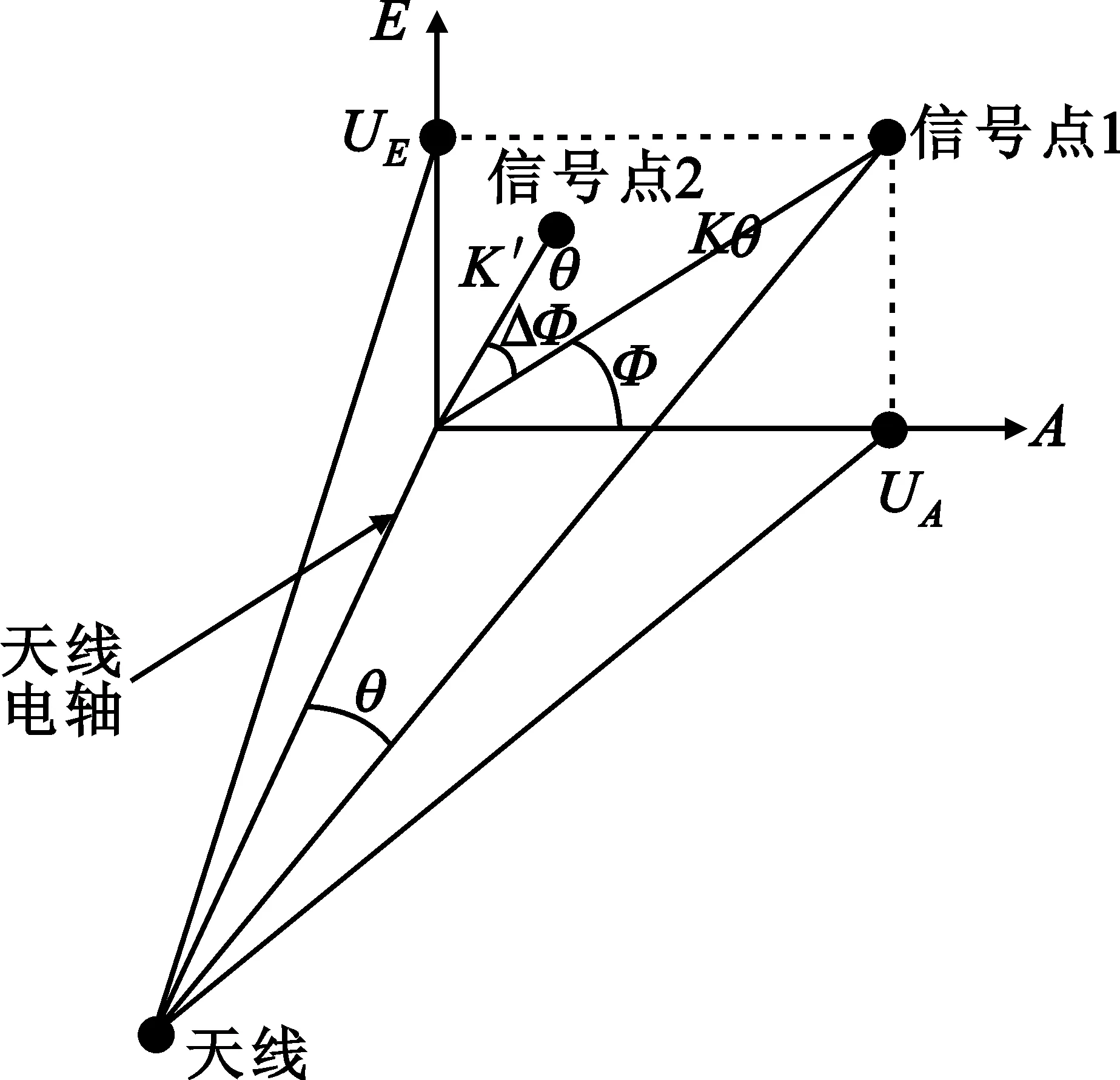
圖1 天線跟蹤目標誤差電壓形成原理圖Fig.1 Illustration of error voltage produced by antenna tracking object
從圖1中可以看出,方位、俯仰誤差電壓表示如下:
UA=Kθcos(Φ+ΔΦ)=
(1)
UE=Kθsin(Φ+ΔΦ)=
(2)
式中,UA為方位誤差電壓,UE為俯仰誤差電壓,K為下行鏈路增益系數,θ為天線電軸與天線到空間目標連線之間的夾角(偏離角度),Φ為目標與方位軸夾角,ΔΦ為接收機和、差鏈路相位差。
3 副面饋電角度標校原理
副面饋電角度標校是一種利用在天線副反射面增設多個(一般為5個)下行信號點源來模擬標校塔實現海上無塔角度標校的新方法。天線副面處于饋源喇叭的遠場區,根據天線微波輻射原理及電磁波傳播理論,如圖2所示,分別在天線副反射面中心位置以及過中心軸線且與中心位置上下、左右對稱的4個位置處共開設5個信號耦合孔,5個信號耦合孔后的正對處依次安裝5個信號耦合器。中心位置信號耦合器模擬天線正對目標時的信號,上下位置信號耦合器分別模擬目標俯仰正、反偏信號,左右位置信號耦合器分別模擬目標方位正、反偏信號。通過對此5個信號耦合器射頻信號的控制達到對天線跟蹤接收機角度標校[3]。

圖2 副面射頻信號耦合裝置分布示意圖Fig.2 Distribution of coupling devices
副面饋電角度標校的原理是依據安裝于副面的信號耦合器相對與天線饋源喇叭模擬方位或俯仰空間位置上產生一定的偏置角來完成跟蹤接收機角度標校,因此理論上要求每個偏置信號耦合器應精確定位,確保耦合器產生的信號等效為一個僅在方位或僅在俯仰上具有一定偏置角度的目標。但從實際的安裝調試情況來看,副面饋電角度標校方法存在信號耦合器在天線副面上精確定位較困難的問題,導致同一信號耦合器產生模擬目標偏置信號既包含方位偏置又包含俯仰偏置,且偏置角度較難控制為一固定值。產生這一現象的主要原因有以下兩個方面:
(1)天線副反射面為曲面,信號耦合孔所在副面的曲面方向直接影響偏置信號在方位、俯仰上的偏置量,因此精確定位困難;
(2)由于天線實際安裝時副面與饋源喇叭的空間幾何位置較理論設計有一定的偏差,部分天線因反射體改造時為調整天線方向圖及電軸指向對副面調整幅度較大,導致天線實際安裝的副面位置與饋源喇叭軸線偏差較大且明顯不對稱,因此耦合器精確定位相當困難。
4 特殊情況下的副面饋電角度標校
4.1 標校原理及步驟
為解決副面饋電角度標校因安裝于副面上的信號耦合器精確定位相對困難的問題,我們提出了一種基于副面饋電的新的角度標校方法,在副面上開孔安裝信號耦合器的位置無需嚴格按照單個方位或單個俯仰偏置一固定值,可以有選擇地在副面任意位置開設信號耦合孔并在耦合孔后安裝信號耦合器。這里所說的任意位置是相對于副面角度標校必須具有精確位置而言的,實際上耦合孔位置也有一定的要求,即必須確保信號耦合孔耦合出的信號處于天線差方向圖線性范圍內且不在天線和方向圖零點。這樣既保證了用于標校的耦合信號有一定的偏置,又保證了偏置處于天線方向圖線性范圍內。
圖3為一信號耦合孔的開孔位置及與之對應的天線伺服控制計算機跟蹤界面顯示的大天線實際偏離目標的位置。從圖中可以看出,方位偏置對應到跟蹤示波器的俯仰上,該現象可以從饋源輻射場的理論公式上進行解釋,本文不作詳細說明。

圖3 副面信號耦合器對應位置示意圖Fig.3 Corresponding position distribution of coupling devices
具體標校實施步驟如下:
(1)接收機設置系統下行頻點f,頻率盡量選取在系統下行工作頻段中間點。對大天線遠場目標(標校塔或對同步星)完成該頻點接收機精確的角度標校,包括接收機方位、俯仰交叉耦合度調整及定向靈敏度調整。接收機記錄相關數據(包括鏈路移相值α及增益K)[4]。
(2)開啟天線副面信號耦合孔信號,頻點為f,將信號輸出強度調整到要求值。接收機采用前一項的標校數據,記錄信號在天線伺服控制臺界面的顯示位置方位誤差電壓UA及俯仰誤差電壓UE值。信號在天線伺服控制計算機界面的顯示具體位置如圖4中信號點1所示,由于接收機采用的是已經標校的數據,因此ΔΦ=0°系統無交叉耦合,則對應的方位俯仰誤差電壓值為
UA1=KθcosΦ
(3)
UE1=KθsinΦ
(4)
(3)信號頻點不變,更換下行鏈路或鏈路不變將接收機相位和增益數據打亂模擬接收機性能發生漂移。開啟天線副面信號耦合孔信號,記錄信號在天線伺服控制計算機界面的顯示位置的方位誤差電壓UA及俯仰誤差電壓UE值[5]。信號在天線伺服控制臺界面的顯示具體位置如圖4中信號點2所示,由于接收機采用的是沒有經角度標校的數據,因此ΔΦ≠0°系統一般會有交叉耦合且鏈路增益也不為K(設為K′),則對應的方位俯仰誤差電壓值為
UA1=K′θcos(Φ+ΔΦ)
(5)
UE1=K′θsin(Φ+ΔΦ)
(6)
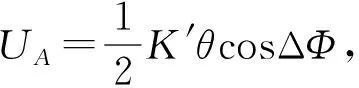
(4)接收機角度標校。如圖4所示,保持鏈路增益K′不變,調整鏈路移相器改變鏈路相位使(Φ+ΔΦ)=0,此時信號在天線伺服控制計算機界面的顯示具體位置從信號點2移動到信號點3位置;保持鏈路相位不變,調整鏈路增益,使UA1=Kθ,此時信號在天線伺服控制計算機界面的顯示具體位置從信號點3移動到信號點4位置;保持鏈路增益不變,調整鏈路相位,使UA1=KθcosΦ,此時信號在天線伺服控制計算機界面的顯示具體位置從信號點4移動到信號點1位置,ΔΦ=0接收機無交叉耦合,增益為K滿足要求。
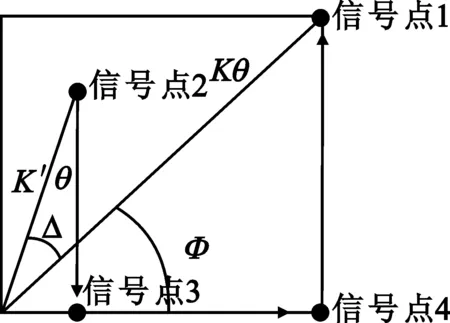
圖4 角度標校過程示意圖Fig.4 Illustration of phase calibration
(5)記錄接收機移相值及增益值數據,接收機f頻點角度標校完成。采取同樣的方法可完成其它所有頻點的角度標校工作。
4.2 海上無塔標校實現
船出海后,因環境影響或鏈路維修等原因,接收機性能會有一定程度的改變,和差鏈路相位、增益均會發生漂移,必須進行角度標校,可采用如下兩種方法完成海上無塔動態角度標校。
(1)查表法
船在碼頭時,將天線下行工作頻段按照一定的步長(如5 MHz)分成若干個頻點,采用4.1節第2步的方法記錄下天線副面上某信號耦合器各頻點信號對應的方位、俯仰誤差電壓uA、uE值,形成相應數據表格。當船出海后需要對某頻點信號進行角度標校,可以采用查表方法找出與之最接近頻點信號的方位、俯仰誤差電壓uA、uE值,按照4.1節步驟4完成該頻點角度標校工作。
(2)自動校相輔助法
自動校相是測控系統數字跟蹤接收機通過軟件自動查找滿足某頻點信號角檢器輸出最大誤差電壓時所對應的移相值。從多次試驗情況來看,各頻點副面饋電信號自動校相所得的移相值Φ自與該頻點信號遠場目標(對塔或同步星)角度標校所得真實移相值Φ真的差值Φ差基本為一固定值。表1為某天線自動校相及對同步星實際標校數據,從表中可以看出,自動校相與對同步星校相差值平均為110°左右,誤差小于±10°,在允許誤差范圍內。因此,當船出海后需要對某任務頻點f任信號進行角度標校時,可以先按照4.1節的方法得出某標準頻點f標真實移相值Φ標,然后結合自動校相法得出副面饋電信號在標準頻點f標及所要標校的任務頻點f任對應的自動校相移相值Φ自標、Φ自任,最后計算出任務頻點f任真實移相值為:Φ自任+Φ標-Φ自標。
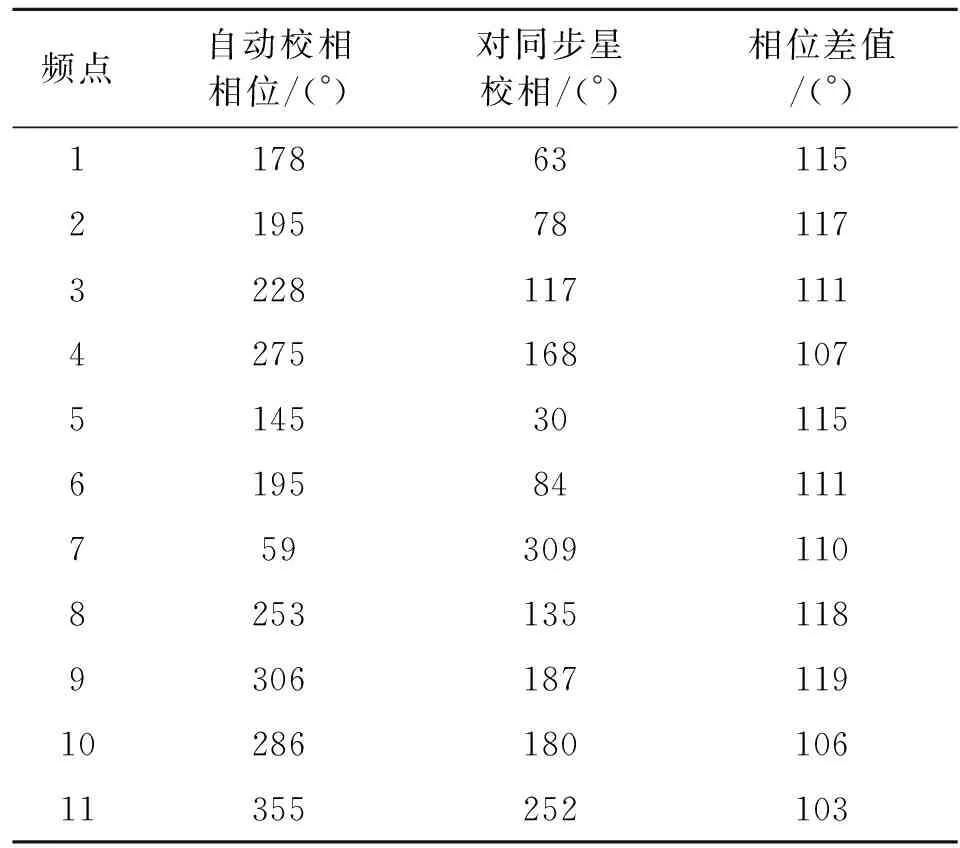
表1 角度標校數據比較表Table 1 Data comparison table of angle calibration
5 試驗情況
5.1 同頻點不同鏈路試驗情況
試驗所用天線類型為C頻段10 m修正型卡塞格倫雙反射面船載測控天線。按照4.1節方法對頻點f1不同鏈路進行角度標校,即先按照4.1節中步驟1和2在已經標校好的A套下行接收鏈路完成頻點f1副面信號耦合器誤差電壓顯示位置定位;再按照4.1節中步驟3~5對B套下行接收鏈路完成頻點f1角度標校。B套標校完成后對其方位、俯仰線性度檢查,其方位、俯仰拉偏線性如圖5所示。
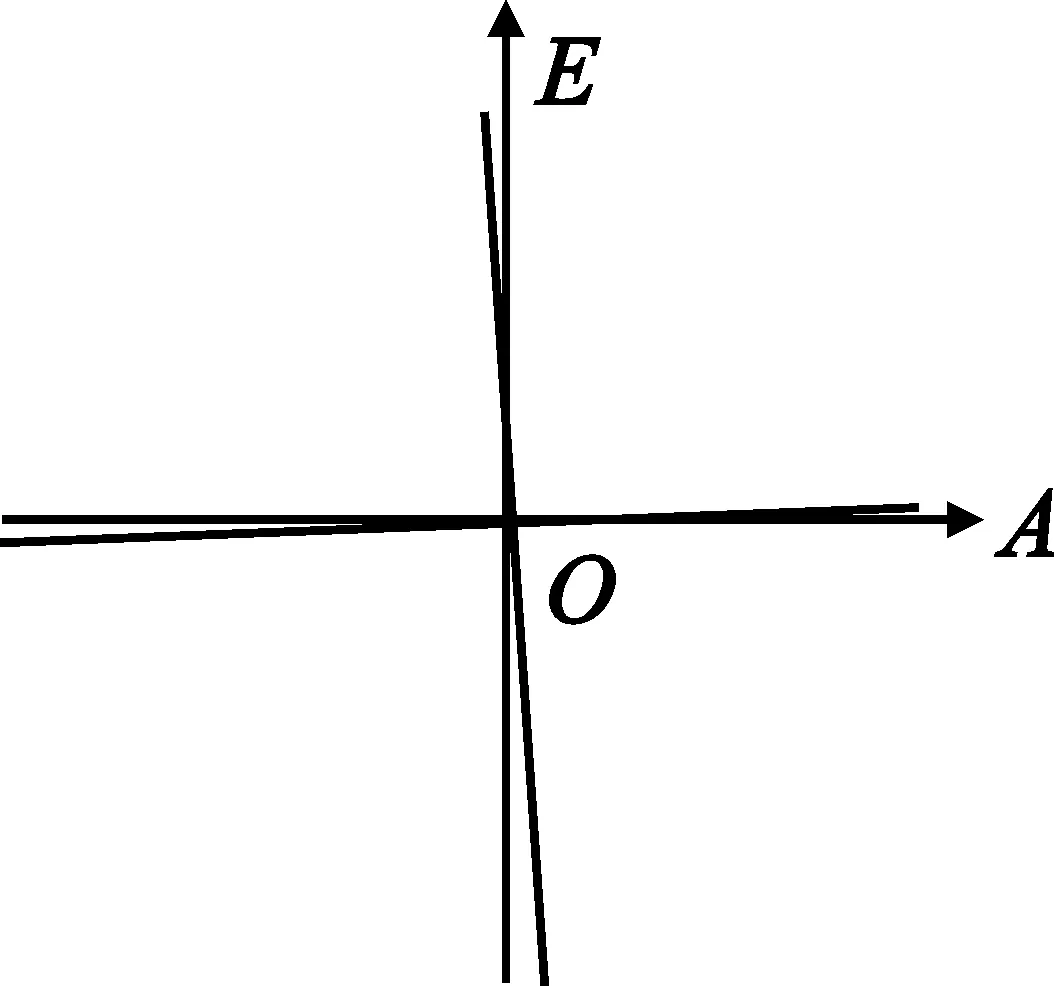
圖5 接收機拉偏線性圖Fig.5 Deviation linearity of receiver
從圖5可以看出,方位、俯仰線性良好,接收機跟蹤性能滿足使用要求。
5.2 不同頻點不同鏈路試驗情況
采用4.2節自動校相輔助法對多個不同頻點進行角度標校試驗,天線仍為C頻段10 m修正型卡塞格倫雙反射面船載測控天線,以f1為參考頻點,記錄A套接收機f1頻點標校完成后的真實移相值Φ1,然后結合自動校相法得出副面饋電信號在標準頻點f1及所要標校的試驗頻點f試對應的自動校相移相值Φ自標、Φ自試,最后計算出試驗頻點f試理論移相值為:Φ試=Φ自試+Φ標-Φ自標。本次試驗選用了f2、f3、f4、f54個試驗頻點進行角度標校,具體數據如表2所示。
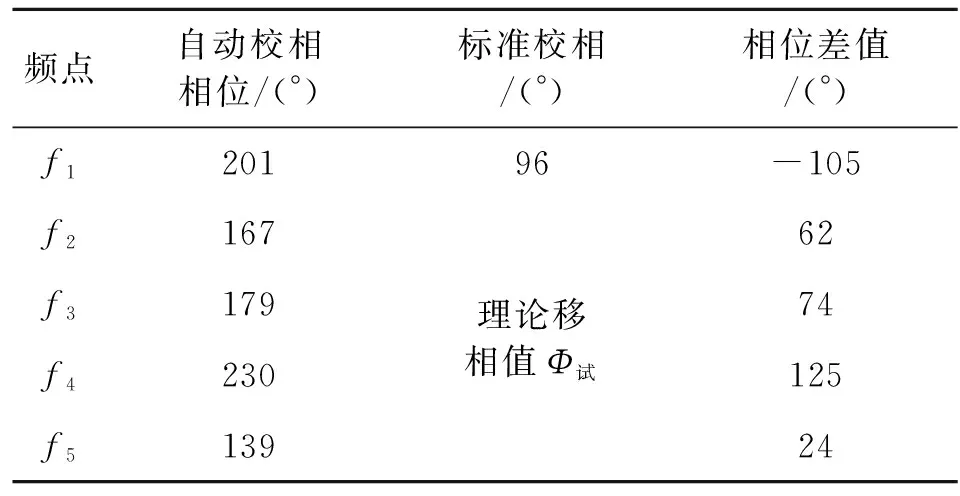
表2 試驗數據Table 2 Test data
根據表2中各試驗頻點的理論移相值Φ試設置跟蹤接收機參數,并檢查各試驗頻點其方位、俯仰拉偏線性,如圖6所示。
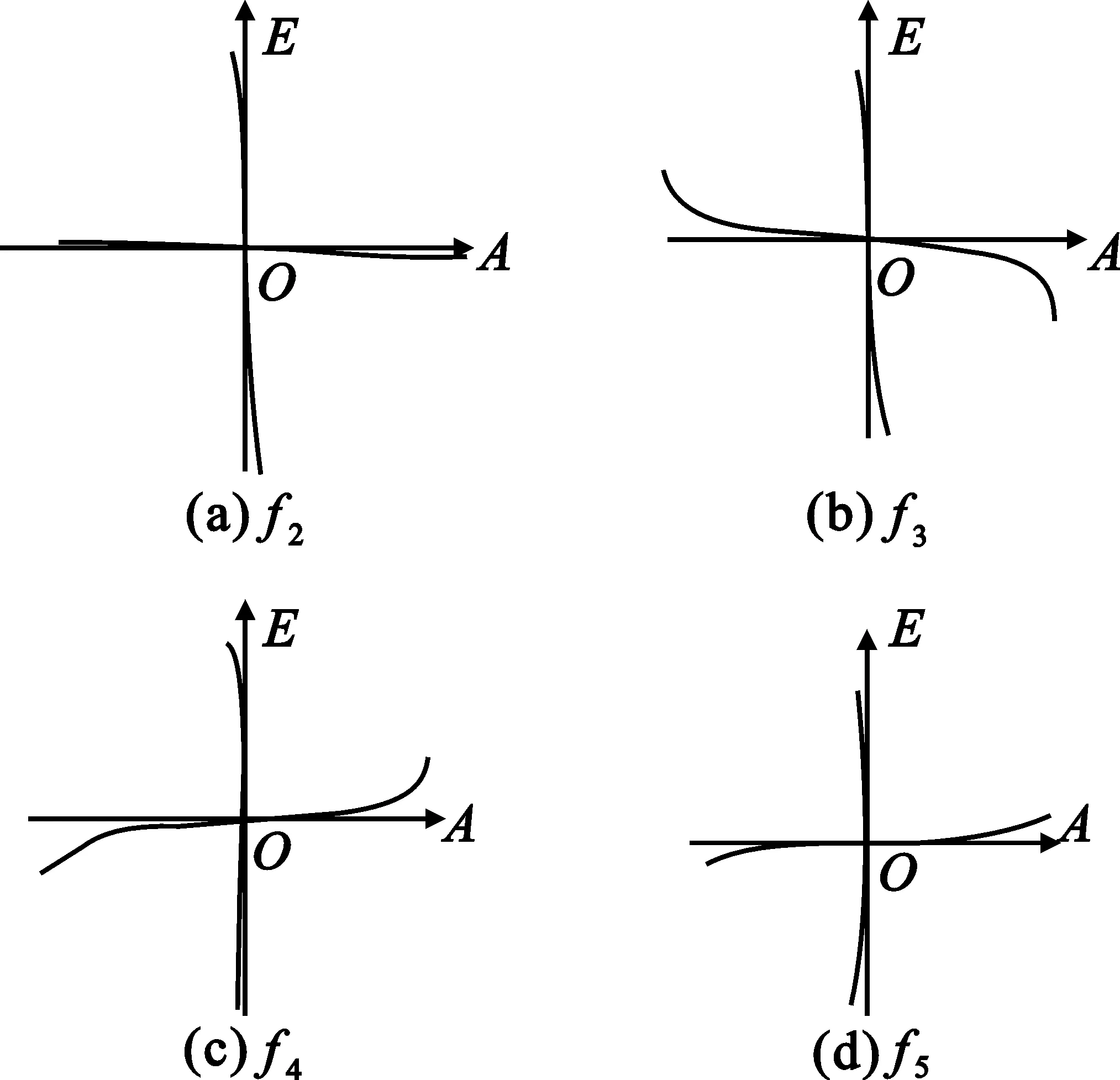
圖6 各頻點接收機拉偏線性圖Fig.6 Deviation linearity of receiver at different frequency point
從圖6可以看出,方位、俯仰線性良好,接收機跟蹤性能滿足使用要求。
6 結束語
本文提出的在天線副面與饋源喇叭空間幾何位置不對稱情況下的角度標校本質上仍屬于副面饋電角度標校,是一種特殊情況下的天線副面角度標校,是對副面角度標校方法的完善和補充。該方法較好地解決了副面饋電信號耦合器精確定位難的問題,為船載大型測控天線海上動態角度標校提供了一種新的角度標校方法,具有較高的理論和實用價值。該方法可推廣運用于其它無標校塔的陸基高頻率大口徑測控天線的角度標校。
參考文獻:
[1] 毛南平,叢波.近場效應對一種C頻段統一測控雷達角度標校數據的影響分析[J].電訊技術,2004,48(4):65-68.
MAO Nan-ping,CONG Bo.Analysis of Near Field Effect on the Angle Calibration Data of a C Band Unified TT&C Radar[J].Telecommunication Engineering,2008,48(4):65-68.(in Chinese)
[2] 沈民誼,蔡鎮遠.衛星通信天線、饋源、跟蹤系統[M].北京:人民郵電出版社,1993.
SHEN Min-yi,CAI Zhen-yuan.Satellite communications antenna,feed horn and tracking system [M]. Beijing: People′s Post&Telecom Press, 1993. (in Chinese)
[3] MAO Nanping,YU Xinfeng.Subreflector Feed Angle Calibration for Giant T&C Antenna with Two Reflectors under Maritime Dynamic Environment[C]//Proceedings of International Conference on Mechanical and Electrical Technology.Singapore:[s.n.],2010:223-225.
[4] 鐘德安. 航天測量船測控通信設備標校與校飛技術[M].北京:國防工業出版社,2009.
ZHONG De-an. Calibration technologies for spaceflight survey ship TT&C and communication system[M]. Beijing: National Defense Industry Press, 2009. (in Chinese)
[5] 趙業福,李進華.無線電跟蹤測量[M].北京:國防工業出版社,2003.
ZHAO Ye-fu, LI Jin-hua. Radio tracking and measurement[M]. Beijing: National Defense Industry Press, 2003. (in Chinese)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06