基于卡爾曼濾波器的零速修正技術(shù)在導(dǎo)彈發(fā)射車中的應(yīng)用研究
2010-09-20 02:56:04淮陰師范學(xué)院淮安223001楊裕翠俞阿龍
電氣自動(dòng)化 2010年1期
淮陰師范學(xué)院(淮安 223001) 楊裕翠 俞阿龍
南京航空航天大學(xué)(南京 210016) 祝燕華
1 引言
現(xiàn)代戰(zhàn)爭(zhēng)中,為了提高導(dǎo)彈武器系統(tǒng)的生存能力和戰(zhàn)斗能力,采用隨機(jī)點(diǎn)快速發(fā)射(機(jī)動(dòng)發(fā)射)是一項(xiàng)重要的措施。傳統(tǒng)的定點(diǎn)發(fā)射方式,需預(yù)先在發(fā)射場(chǎng)坪標(biāo)定出大地坐標(biāo),這既不適用于任意點(diǎn)發(fā)射,又不利于縮短反應(yīng)時(shí)間;而機(jī)動(dòng)發(fā)射帶來的問題是如何能快速、精確地測(cè)定發(fā)射點(diǎn)的地理坐標(biāo)位置。
目前,用于發(fā)射車定位的技術(shù)主要有慣性定位和衛(wèi)星定位技術(shù),本文所研究的問題是針對(duì)慣性定位而言的。慣性定位系統(tǒng)能實(shí)時(shí)自主地提供載體的姿態(tài)、速度和位置信息,但是它的不足之處在于慣性器件引起的定位誤差隨時(shí)間積累,因而長(zhǎng)時(shí)間獨(dú)立工作后的定位信息的誤差大[1,2]。
本文提出了將零速修正技術(shù)應(yīng)用在導(dǎo)彈發(fā)射車車載捷聯(lián)慣導(dǎo)系統(tǒng)中,采用卡爾曼濾波對(duì)慣導(dǎo)誤差進(jìn)行實(shí)時(shí)計(jì)算并補(bǔ)償,提高了慣導(dǎo)的定位精度,可以實(shí)現(xiàn)隨機(jī)點(diǎn)的快速定位。
2 基于卡爾曼濾波的零速修正算法
零速修正(ZUPT)技術(shù)是利用載體停車時(shí)慣性系統(tǒng)的速度輸出作為系統(tǒng)速度誤差的觀測(cè)量,進(jìn)而對(duì)其它各項(xiàng)誤差實(shí)現(xiàn)校正的技術(shù)。具體的實(shí)現(xiàn)過程為,慣導(dǎo)系統(tǒng)啟動(dòng)并經(jīng)初始對(duì)準(zhǔn)后,從一個(gè)已知坐標(biāo)點(diǎn)出發(fā),每隔一定時(shí)間停車進(jìn)行零速修正,到達(dá)待測(cè)點(diǎn)后,在短時(shí)間內(nèi)(如1分鐘)即可獲得該點(diǎn)的坐標(biāo)數(shù)據(jù)。這種方法除需要一個(gè)起始坐標(biāo)點(diǎn)外,途中不需要任何外部信息,因此將其應(yīng)用在導(dǎo)彈發(fā)射車上,對(duì)于現(xiàn)代戰(zhàn)爭(zhēng)環(huán)境下的應(yīng)用具有十分明顯的優(yōu)勢(shì)。
采用零速修正進(jìn)行誤差估計(jì)的算法有很多[2],如曲線擬合、最大似然估計(jì)和卡爾曼濾波等。曲線擬合和最大似然估計(jì)方法由于模型簡(jiǎn)單且對(duì)時(shí)間間隔的依賴性大,所以估值精度較低;而卡爾曼濾波是線性最小方差的無偏估計(jì),估值精度較高,并且從誤差特性考慮。本文針對(duì)某國(guó)防項(xiàng)目的實(shí)際研究需要,采用基于實(shí)時(shí)卡爾曼濾波的零速修正誤差估值算法,分析零速修正時(shí)不同時(shí)間間隔對(duì)系統(tǒng)性能和精度的影響。
2.1 慣性儀表誤差模型
慣性儀表誤差主要包括安裝誤差、刻度系數(shù)誤差和隨機(jī)誤差,認(rèn)為非隨機(jī)性誤差已通過多位置量測(cè)等方法進(jìn)行校正,這里僅考慮隨機(jī)誤差。
(1)陀螺漂移誤差模型

式中,!b為隨機(jī)常數(shù);!r為一階馬爾可夫過程;"g為白噪聲。
假定三個(gè)軸向的陀螺漂移誤差模型相同,均為
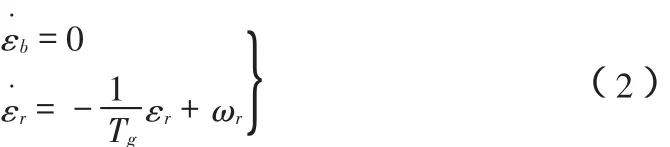
式中,Tg為馬氏過程的相關(guān)時(shí)間,"r為馬氏過程的白噪聲。
(2)加速度計(jì)誤差模型
考慮其為一階馬爾可夫過程,且假定三個(gè)軸向加速度計(jì)的誤差模型相同,均為

式中,Ta為馬氏過程的相關(guān)時(shí)間,ωa為馬氏過程的白噪聲。
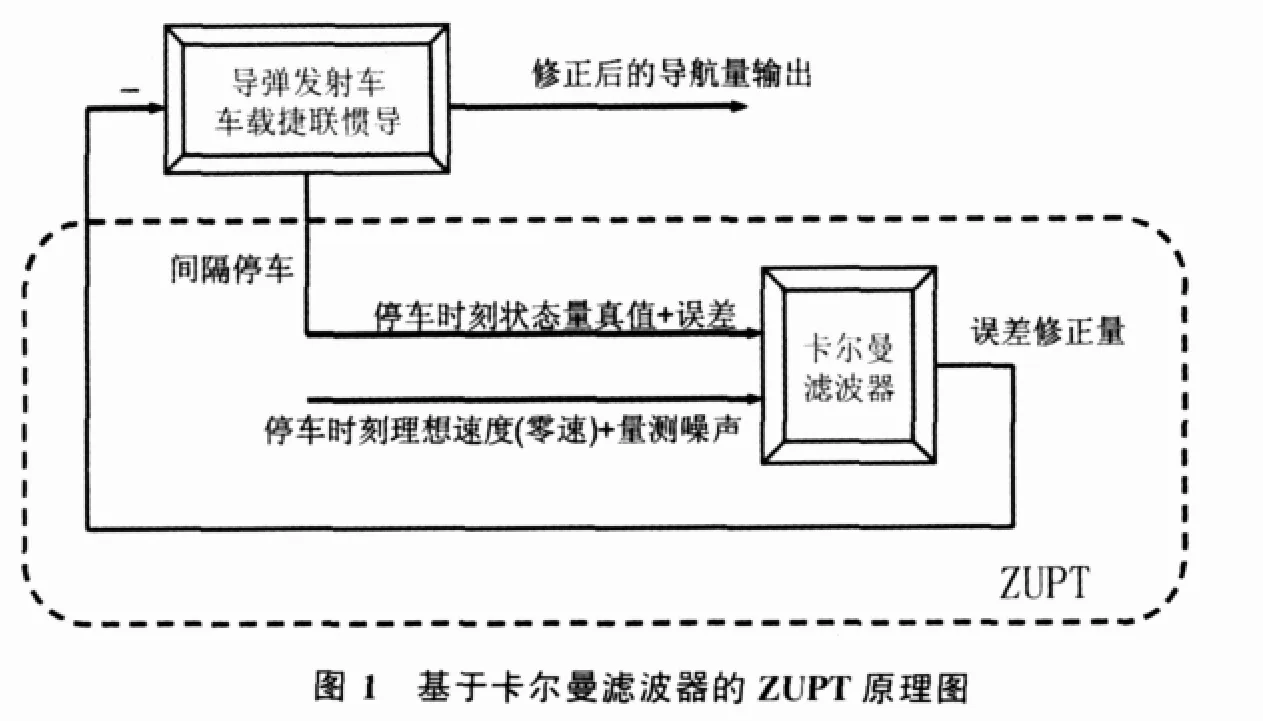
2.2 基于卡爾曼濾波器的ZUPT模型
基于卡爾曼濾波器的ZUPT模型的基本原理如圖所示:
發(fā)射車車載捷聯(lián)慣導(dǎo)系統(tǒng)的誤差模型可用下列狀態(tài)方程描述:

上式中,狀態(tài)向量可分為兩個(gè)向量來考慮

其中,X1為慣導(dǎo)系統(tǒng)的九個(gè)導(dǎo)航誤差狀態(tài)向量,X2為九個(gè)傳感器誤差的增廣狀態(tài)向量,如下所示:

T(t)為18階的系統(tǒng)矩陣,G(t)為18×9的系統(tǒng)噪聲系數(shù)矩陣,W(t)表示系統(tǒng)噪聲。
在導(dǎo)彈發(fā)射車停車時(shí),真實(shí)的速度輸出在東、北、天方向的分量都應(yīng)該為零,那么慣導(dǎo)的速度輸出必然就是速度誤差。所以,以慣導(dǎo)系統(tǒng)的速度輸出作為觀測(cè)量,建立下面的觀測(cè)方程:

其中,V(t)表示量測(cè)噪聲,H值應(yīng)為:

于是經(jīng)離散化后,卡爾曼濾波器有下列方程組
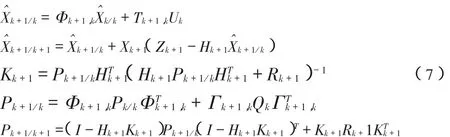
式中:Q和 R分別為系統(tǒng)噪聲方差陣和量測(cè)噪聲方差陣,只要給定初值,便可利用上式遞推得到各狀態(tài)的最優(yōu)估計(jì)并進(jìn)行實(shí)時(shí)的補(bǔ)償[3,4]。
3 仿真分析
3.1 仿真流程圖及其初始條件
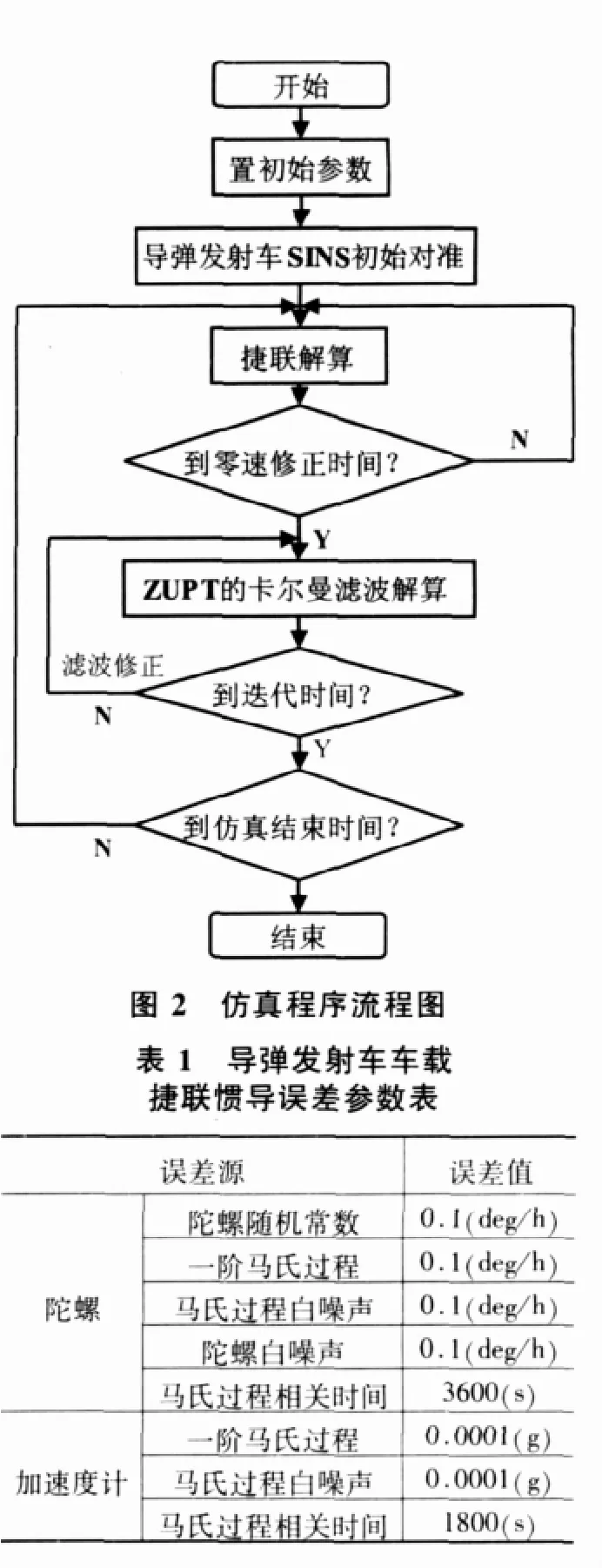
導(dǎo)彈發(fā)射車捷聯(lián)慣導(dǎo)系統(tǒng)零速修正仿真流程圖給定如下:
導(dǎo)彈發(fā)射車純捷聯(lián)慣導(dǎo)誤差參數(shù)如表1所示:
3.2 系統(tǒng)仿真和結(jié)果
導(dǎo)彈發(fā)射車初始位置為東經(jīng)118.0°,北緯 32.0°,海 拔 高 度1000.0米,初始姿態(tài)水平,初始航向角為0.0°。
導(dǎo)彈發(fā)射車的運(yùn)動(dòng)包括:平直加速、平直勻速行駛、平直減速、停車這五個(gè)狀態(tài)。發(fā)射車每隔一定時(shí)間T重復(fù)這一運(yùn)動(dòng)過程。在停車位置進(jìn)行卡爾曼濾波的零速修正,得到狀態(tài)的最優(yōu)估計(jì)并進(jìn)行閉環(huán)實(shí)時(shí)補(bǔ)償,停車時(shí)間即為卡爾曼濾波迭代時(shí)間τ。
要想從根本上提高民辦高校實(shí)驗(yàn)建設(shè)和教學(xué)管理水平,既滿足教學(xué)需求,又能做到為學(xué)生負(fù)責(zé),為國(guó)家提供自主創(chuàng)新的人才。需要民辦高校不斷深化教育教學(xué)改革,對(duì)實(shí)驗(yàn)教學(xué)管理提出更高的要求,并在此基礎(chǔ)上不斷培養(yǎng)高素質(zhì)、高水平的技術(shù)應(yīng)用型人才。但是,現(xiàn)在的民辦高校還不能更好的適應(yīng)社會(huì)的發(fā)展,實(shí)驗(yàn)室的管理水平還不夠科學(xué)規(guī)范,實(shí)驗(yàn)室的利用率沒有充分挖掘,不能更好的服務(wù)于學(xué)生。要提高教學(xué)質(zhì)量,需要進(jìn)一步解決實(shí)驗(yàn)教學(xué)中存在的不足。
國(guó)外資料表明,零速修正的停車間隔一般為3~5分鐘[5]。為了考察停車間隔時(shí)間T對(duì)零速修正性能的影響,本文設(shè)計(jì)了三條航跡進(jìn)行仿真比較,這三條航跡中發(fā)射車所經(jīng)過的路徑是完全相同的,則車輛的行駛里程也必然相同,不同點(diǎn)在于停車間隔T,具體說明如下:
*航跡1:停車間隔T=300s,車輛行駛過程中的加速度為5.00m/s/s,最大速度為25.0m/s;
*航跡2:停車間隔T=500s,車輛行駛過程中的加速度為4.96m/s/s,最大速度為20.6m/s;
*航跡3:停車間隔T=900s,車輛行駛過程中的加速度為4.12m/s/s,最大速度為24.8m/s;
行駛里程共73.75公里,仿真時(shí)間均在1小時(shí)左右,在停車位置濾波迭代40s進(jìn)行修正。
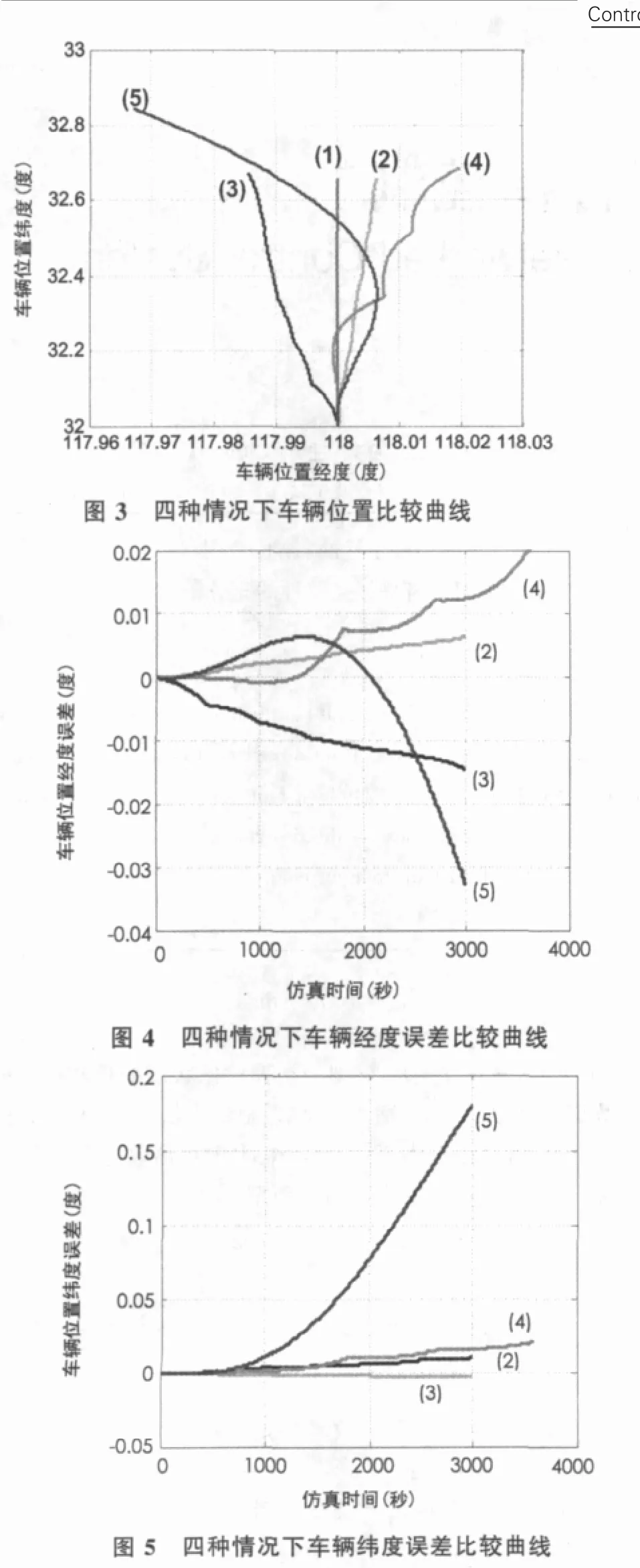
為了考察以及比較零速修正的性能,我們給出整個(gè)仿真過程導(dǎo)彈發(fā)射車?yán)硐虢?jīng)緯度位置曲線(曲線1)、導(dǎo)彈發(fā)射車上純捷聯(lián)慣導(dǎo)解算得到的經(jīng)緯度位置曲線及其誤差曲線(曲線5),以及三條不同停車間隔的SINS+ZUPT解算得到的經(jīng)緯度位置曲線及其誤差曲線(T=300s時(shí),曲線2;T=500s時(shí),曲線 3;T=900s時(shí),曲線 4),如圖 3、4和 5所示:上面的曲線圖不僅直觀地反映了零速修正技術(shù)大大降低了發(fā)射車的位置誤差,提高了捷聯(lián)慣導(dǎo)的定位精度,而且說明了零速修正的有效性會(huì)隨著停車間隔時(shí)間的增長(zhǎng)而降低。
?
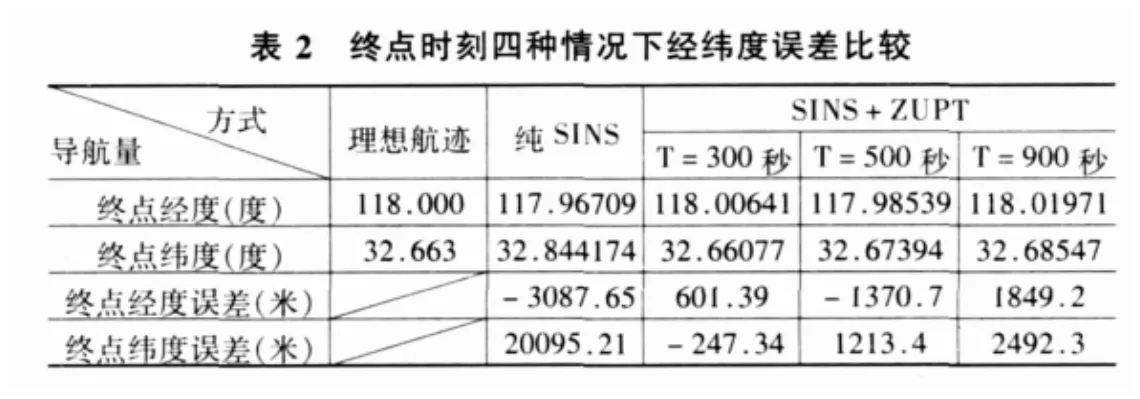
由于導(dǎo)彈發(fā)射車零速修正的目的在于實(shí)現(xiàn)導(dǎo)彈的隨機(jī)點(diǎn)快速發(fā)射,即要能以較高的精度給出發(fā)射車到達(dá)發(fā)射點(diǎn)時(shí)刻的位置,為此給出四種情況下發(fā)射車到達(dá)終點(diǎn)時(shí)刻的定位數(shù)據(jù),如表2所示:
分析表格中的數(shù)據(jù)可知,停車間隔T=300s時(shí)終點(diǎn)經(jīng)度、緯度誤差都在500米左右,相對(duì)純捷聯(lián)而言,精度提高了100倍,隨著T的增加,精度降低,到T=900s時(shí)終點(diǎn)經(jīng)度、緯度誤差已達(dá)2000米以上,零速修正的效果已經(jīng)不是很顯著。以本文仿真所給出的IMU精度來講,停車間隔在10分鐘以內(nèi)SINS+ZUPT的定位精度是比較高的。
一方面,對(duì)于導(dǎo)彈隨機(jī)發(fā)射點(diǎn)的定位精度來說,顯然停車間隔T越短越好;另一方面,對(duì)于發(fā)射車發(fā)動(dòng)機(jī)而言,頻繁加速減速停車會(huì)增重其負(fù)擔(dān),停車間隔T又不易太短。所以,在工程實(shí)踐中,應(yīng)同時(shí)從這兩個(gè)方面考慮,并結(jié)合IMU的精度,選擇合適的停車間隔時(shí)間。
! 結(jié)論
本文提出了將零速修正技術(shù)應(yīng)用在導(dǎo)彈發(fā)射車車載捷聯(lián)慣導(dǎo)系統(tǒng)中,并采用卡爾曼濾波方法對(duì)慣導(dǎo)誤差進(jìn)行實(shí)時(shí)計(jì)算并補(bǔ)償,經(jīng)過多次的仿真驗(yàn)證,均表明卡爾曼濾波的零速修正其有效性隨著停車間隔時(shí)間的增長(zhǎng)而降低,從原理上分析也可知,一方面是由于慣導(dǎo)系統(tǒng)位置誤差快速增長(zhǎng);另一方面,慣導(dǎo)速度誤差與位置誤差變化的相關(guān)性隨著停車間隔T的增大而降低。因此在工程實(shí)踐中應(yīng)綜合考慮定位精度要求和導(dǎo)彈發(fā)射車行車的需求,選擇合理的停車間隔。
綜上,本文提出的卡爾曼濾波的零速修正能在較大程度上減小慣導(dǎo)的定位誤差,解決了導(dǎo)彈武器系統(tǒng)發(fā)射車的隨機(jī)點(diǎn)快速發(fā)射問題,而且通過對(duì)零速修正間隔時(shí)間不同對(duì)慣導(dǎo)性能的影響比較,在工程實(shí)踐中具有重要的參考價(jià)值。
[1]李輝,王子濱.國(guó)外GPS/INS復(fù)合制導(dǎo)技術(shù)的發(fā)展[J].現(xiàn)代防御技術(shù),2004,32(2):42 ~ 46.
[2]高鐘毓,王進(jìn),董景新,趙長(zhǎng)德.慣性測(cè)量系統(tǒng)零速修正的幾種估計(jì)方法[J].中國(guó)慣性技術(shù)學(xué)報(bào),1995,3(2):24 ~ 29.
[3]楊大燁,謝天懷,胡寶余.捷聯(lián)慣導(dǎo)系統(tǒng)初始姿態(tài)和儀表誤差標(biāo)定迭代算法研究[J].中國(guó)慣性技術(shù)學(xué)報(bào),2002,10(3):15 ~ 20.
[4]Xiaoying Kong.INS algorithm using quaternion model for low cost IMU.Robotics and Autonomous Systems,2004,46(4):221 ~246.
[5]Hu Shan,Luo Jian-Jun,Yuan Jian-ping.Development of simulation system of INS/DS integrated system.Journal of System Simulation,2004,16(9):57~60.
[6]馬小艷,富立,王玲玲.不等間隔角速率輸出的捷聯(lián)航姿算法研究[J].中國(guó)慣性技術(shù)學(xué)報(bào),2006,14(3):18~22.
[7]Bortz J E.A new mathematical formulation for strapdown inertial navigation[J].IEEE Transactions on Aerospace and Electronic Systems,1971,7(1):61~66.
[8]祝燕華,劉建業(yè),錢偉行,賴際舟.低成本捷聯(lián)慣導(dǎo)系統(tǒng)的靜基座快速精對(duì)準(zhǔn)方法[J].上海交通大學(xué)學(xué)報(bào),2008,32(05):32 ~37.
[9]Miller R B.A new strap - down attitude algorithm[J].Journal of Guidance,Control,and Dynamics,19183,6(4):287~291.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28