基于 T-S模糊模型的非線性系統狀態估計
2010-09-13 03:44:48張永鋒
通信技術 2010年11期
張永鋒
(四川大學數學學院,四川 成都 610064)
0 引言
在目標跟蹤或動力系統領域中,非線性系統的狀態估計越來越得到人們的青眛。中將數據融合方法運用于機器人系統設計中[1],使用傳統的方法處理了估計及濾波設計問題[2-3],文獻[4]中也使用了最小二乘的方法,但主要思想是基于泰勒展式對非線性系統的線性化,如擴展卡爾曼濾波(EKF)[5-6],但對高度非線性的系統,用(EKF)的效果不是十分好,還有一些使用統計技術的方法,如文獻[7]中通過選取樣本粒子去離散化非線性系統,然后基于選取的粒子去濾波,如無味濾波,粒子濾波等,遺憾的是這些方法的計算復雜度非常大,不適于實時的目標跟蹤。最近幾十年來,有控制系統領域的學者提出用模糊推理方法對非線性系統建模逼近去找狀態估計[8],其中最著名的有 T.Takagi和 M.Sugeno提出的模糊規則逼近模型(T-S模型)。
將模糊推理理論與Kalman濾波結合,提出一種對非線性系統目標狀態估計的新方法。這個方法的主要思想是:①用局部狀態空間模型族表示一個模糊系統;②對每個局部狀態系統濾波得到局部狀態估計;③從這對 m個局部狀態估計進行模糊線性組合,并進行加權優化處理得到全局估計。能夠證明這樣構造的全局狀態估計是一個無偏的,且穩定的。在給出的貨車 -拖車仿真實驗中,用此方法與一般的EKF方法進行了比較,驗證了用T-S模型規則推理方法得到的估計值的有效性,并給出一些分析的結果。
1 問題闡述
一個非線性函數可以用一族線性函數去逼近,同樣,對任意一個非線性系統可以用下面的 m個模糊規則表示的線性系統去逼近它。
其中:
因為zk是xk或uk的非線性函數,用上式表示的系統是時變的非線性系統,為了對每個局部的線性時不變系統進行狀態估計,可以構造出每個局部系統的狀態 xi(k)與輸出yi(k)如下:

定理 1 由式(3)定義的狀態xi(k)與 yi(k)的狀態方程可用下面的系統來表示:
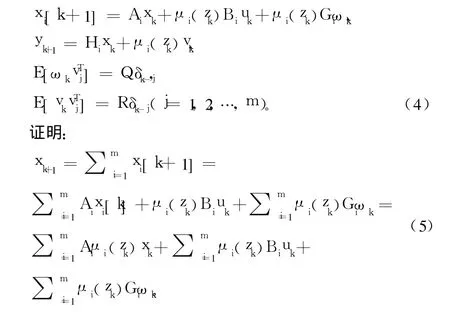
把式(3)定義的矩陣代入式(5)得到:

式(6)是式(1)描述的全局系統的狀態模型,因此式(4)式描述的是狀態xk的動態行為。用同樣的方法可以證明觀測方程的情形。
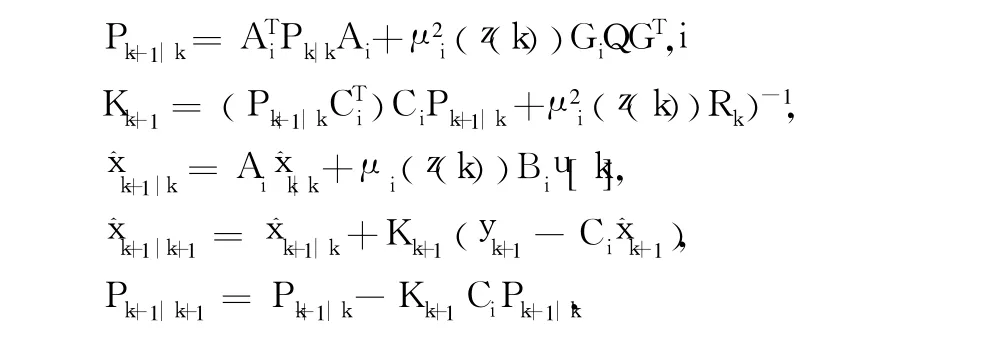
2 模糊系統卡爾曼濾波
卡爾曼濾波的理論的發展已經很成熟了,下面給出經過修正的模糊線性系統的模糊卡爾曼濾波公式。模糊卡爾曼濾波方程與標準卡爾曼濾波方程不同的是式(4)表示的是個模糊的系統,經過下面的濾波公式,得到局部的目標狀態估計 ,利用這個局部的估計得到一個所表示的全局模型系統的狀態估計每個時間步,模糊卡爾曼濾波為:
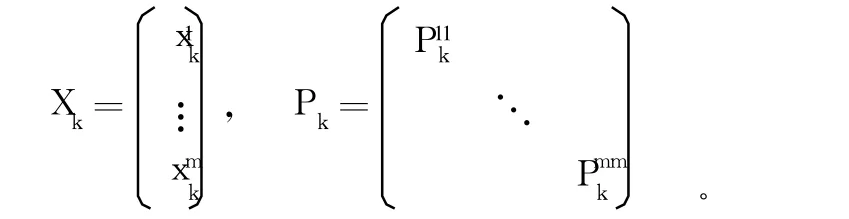
有了 m個局部估計 x1[k],x2[k],…,xn[k],就可得到一個無偏估計 x?k|k=Pk|kXk其中 :
因為對于一個非線性系統用T-S模糊規則的方法得到了一個全局的狀態估計為:x?k|k=Pk|kXk是對 x的線性無偏估計中,這是因為每個局部的估計是線性無偏的,全局估計是它們的一個加權和形式,根據矩陣論的理論,如此構造的全局估計仍具有無偏性,在后面的仿真實驗中,可以看到在解決高度非線性問題是時,EKF的性能并不是十分好,但用現提出的基于T-S模型的規則推理得到的估計可以表現出良好的性能,因此用現提出的方法處理非線性系統具有一定的實際可行性.
3 仿真與計算
在文獻[9]中考慮尋求非線性系統最優控制時提出了下面表述的貨車-拖車系統,由于此系統涉及到貨車與拖車的角度信息,所以具有高度的非線性,用EKF方法去估計系統的角度信息表現出的性能不是很好,下面用這里提出的基于T-S模糊模型的方法處理該系統的狀態估計問題,并將于EKF方法進行比較
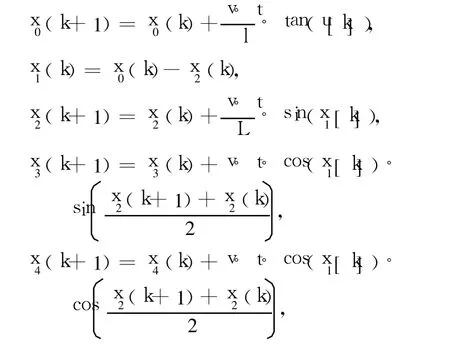
其中,x0(k)是貨車的方向角,x2(k)是拖車方向角,x3(k)是拖車尾部縱向位置,x4(k)是拖車尾部水平位置,uk是轉向角.l是貨車的長度,L是拖車的長度,T是采樣時間,v是恒定的倒退速度,在仿真實驗中取L=5.5m,t=0.05 s,l=2.8 m,v=-1.0m/s。對于式(8)描述的非線性系統,利用 T-S模糊規則理論,可以將它用下面的可加噪聲的模型來表示:
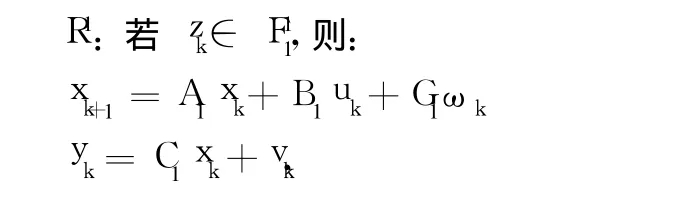
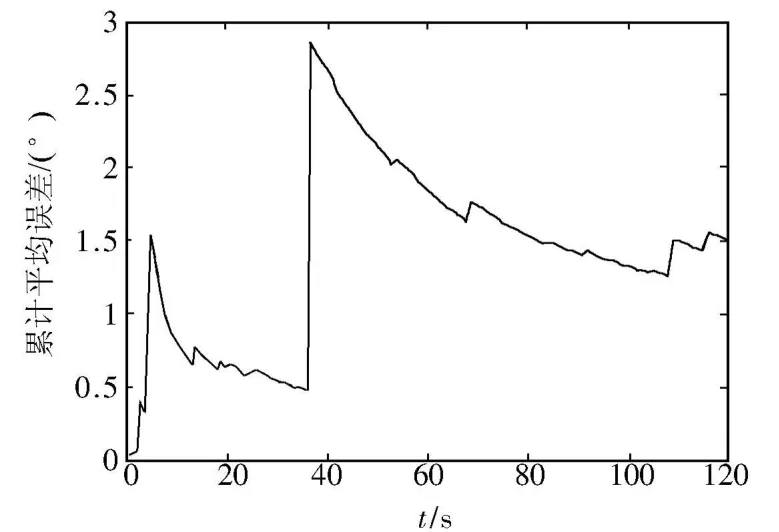
圖 1EKF方法貨車方向角誤差
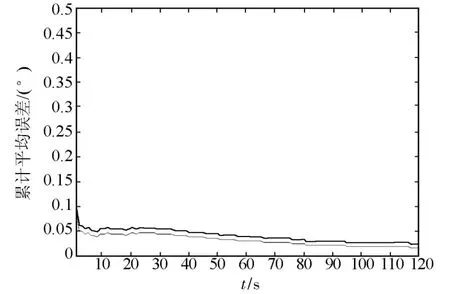
圖 2 T-S方法貨車方向角誤差
4 結語
本文利用可加性噪聲的T-S模糊規則對非線性系統給出了一個狀態估計,是無偏的并且在線性最小誤差方差意義下最優估計,仿真的結果表明用基于 T-S的模糊規則與EKF結合的方法對非線性系統進行狀態估計能取的良好的效果,并且能表現出很好的穩健性。
[1]趙海,王光興,數據融合論在機器人系統設計中的應用[J].[EB/OL].(2010-03-01)[1995-03-01].http://www.cnki.com.
[2]徐自勵,華偉,王一揚.多窗譜估計法估計相干函數的雙端語音檢測[J].通信技術,2007,40(05):75-76.
[3]安勇,牟容增,陳家國,等.基于多級內插的基帶信號成形濾波設計[J].通信技術,2008,41(05):4-6.
[4]崔健陳洪 張爾揚 .一種 MC-CDMA最小二乘信道估計的改進算法[J].通信技術,2008,41(07):112-114.
[5]BOZIC S.Digital,Kalman Filtering[M].USA:Halsted Press,1994.
[6]TAKAGI T,SUGENOM.Fuzzy Identification of Systems and Its Applications to Modeling Andcontrol[J].IEEETrans Syst.Man Cybernetics SMC,1985,15(01):116-132.
[7]PARIZ N.A Robust Fuzzy Model Following Observer‐Based Control Design for Nonlinear System[J].USA:IEEE,2006:5040-5043.
[8]CHEN G,WANG J,SHIEH L.Interval Kalman filter[J].IEEE Trans.Aerosp.Electron.Syst,1997(33):250-259.
[9]CHEN G,XIE Q,SHIEH L.Fuzzy Kalman filtering[J].Inf.sci,1998(109):197-209.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
