一種瞄星替代方法方案設計
2010-07-16 07:35:50徐立群馮元偉劉少偉
指揮控制與仿真 2010年2期
徐立群,馮元偉,劉少偉
(解放軍92941部隊, 遼寧 葫蘆島 125001)
艦炮武器系統角度零位一致性檢查是系統試驗、使用過程中一項重要的基礎性工作,是艦炮武器系統精確探測、跟蹤目標,進行精確火控解算,準確打擊目標的前提和基礎。艦炮武器系統中艦炮、炮瞄雷達、光電跟蹤儀等設備,它們的角度安裝、檢測都是以艦艇基準平面和艦艏艉線為基準,充分運用各種光學設備,使被試設備的電器零位與機械零位保持一致,使電氣傳輸的信息準確表達實際的物理值,以滿足系統的使用要求[1]。
在系泊條件下,傳統的角度零位一致性檢查方法主要是瞄星法,其工作原理是以艦艇相對不穩定坐標系為基準,在某一瞬時時刻,真值設備與被測量設備同時瞄準北極星,從而求得各被測設備在方向、高低上的角度誤差。瞄星法一般采用經緯儀作為角度測量的真值設備,將經緯儀的水平基準與艦基準平臺一致,方位基準與艦艏艉線一致,被檢設備的光學設備與經緯儀同時瞄準天上的某一星體,星體的選擇主要考慮星體的亮度、移動的速度、周圍一定范圍內是否有其它較亮的星體及星體的高低角等因素,如果條件允許通常選擇北極星。之所以選擇星體作為瞄準目標,是由于星體十分遙遠,同時瞄準它的多個設備的光軸可以認為是完全平行的,無需考慮各設備在艦艇坐標系中的相對位置及其基線修正等因素。但傳統的瞄星方法也存在很大的局限性,瞄星必須選擇無風無涌浪、艦艇搖擺幅度不大、天氣晴好的夜晚,若不滿足上述條件,瞄星則無法進行。在某地區的統計數據表明,適合瞄星的天數不足全年的五分之一,天氣因素已成為制約瞄星試驗的瓶頸。
在艦艇系泊條件下,如何根據具體環境條件,創造性地運用瞄星的原理,充分利用現有的光學技術,依托現有的大地測量手段,在確保武器系統精度滿足使用要求的條件下,設計出新的試驗方案是十分必要的。應用上述瞄星原理,采用一種新的方法,在試驗現場選取合適的瞄準目標,并計算真值設備與被測量設備的相對位置關系,亦可求得被測設備在方向、高低上的角度誤差。該方法與瞄星方法相比優勢在于受天氣的制約較小,與平行物標定法相比優勢在于更適用于系泊條件,該方法可作為未來艦炮武器系統零位標校的備用方法和手段進行使用[2]。
1 艦艇相對不穩定直角坐標系的建立[3]
1.1 儀器儀表的準備
試驗中選用6〃手動補償式經緯儀二臺,全站儀一臺,動態角度測量儀一臺,1′瞄星儀一臺。
1.2 設備的水平度檢查[4]
新方法以艦艇基準平臺為基準,每隔30°對艦炮、炮瞄雷達天線基座、光電跟蹤儀基座等設備進行水平度檢查,原則上各設備的水平度誤差最大值不應超過2′,艦炮的水平度誤差可適當放寬,但亦不能超過3′。
1.3 系泊條件下經緯儀的對準與調平
經緯儀的水平測量平面以艦基準平臺為基準,方向以艦艏艉線為基準。首先,在碼頭上將經緯儀水平基準調平,手動補償為 0,然后,將三角架安置于艦艇上,三角架的安裝平面中心點大致置于艦艏艉線上,將經緯儀置于其上,依據艦基準平臺上動態角度測量儀的瞬時數據分別對經緯儀進行縱向、橫向上的高低角度補償,調整經緯儀的基座旋鈕,使經緯儀的測量平面與艦基準平臺水平一致;使用經緯儀的光學對中器,瞄準艦艏艉線,移動經緯儀,使其對中;反復進行上述操作,直至水平角度誤差不大于30〃, 方位的對準誤差不大于1mm;使經緯儀的望遠鏡瞄準艦艏艉線,將經緯儀方位角讀數置為0,高低角補償為0,至此,經緯儀的對準與調平工作全部完成。按照上述方法架設第二臺經緯儀,二臺經緯儀之間的距離不超過2m,高度相同,我們定義為1#、2#經緯儀。
1.4 經緯儀架設點與各設備相對位置的測量
測量經緯儀架設點與各設備相對位置的過程如下:用1#經緯儀瞄準光電跟蹤儀回轉中心,讀取方位角和高低角;取下經緯儀安置全站儀,瞄準光電跟蹤儀同一位置,測量經緯儀與光電跟蹤儀回轉中心點的距離,根據光電跟蹤儀裝艦參數,計算經緯儀與光電跟蹤儀的相對位置坐標。之所以采用經緯儀測角而非采用全站儀測角是因為在艦艇搖擺的條件下,全站儀的高低角采用了自動補償的工作方式,角度值是瞬時變化的,因此無法測量被測點在艦艇不穩定坐標系中的高低角度值。
1.5 艦艇相對不穩定、穩定直角坐標系的建立
該方法以1#經緯儀望遠鏡回轉中心為原點,XY平面為經緯儀水平測量平面且平行于艦基準平臺平面,Y軸平行于艦艏艉線,Z軸垂直于基準平面向上,建立艦艇相對不穩定直角坐標系;如果XY平面為水平面(X’Y’平面),將稱之為艦艇相對穩定直角坐標系。光電跟蹤儀安裝于艦艇后,其與艦炮及炮瞄雷達的相對位置關系是已知的,1#經緯儀與光電跟蹤儀的相對位置關系確定后,可以計算艦炮、光電跟蹤儀、炮瞄雷達與1#經緯儀的相對位置坐標,因此在新的艦艇相對不穩定直角坐標系中,1#經緯儀、艦炮、光電跟蹤儀、炮瞄雷達的位置坐標分別為(0,0,0),(XP,YP,ZP),(XG,YG,ZG),(XL,YL,ZL)。
2 標定場地設計與測繪[5]
2.1 海上燈樁的選擇
海上燈樁的選擇有如下考慮:1)燈樁距我艦的距原距離大于 5km,小于 10km,以利于各種光學儀器進行瞄準;2)海上燈樁在我艦左、右舷40°~140°范圍內為宜,以滿足各設備的通視要求;3)燈樁上架設光電標,光電標球體直徑0.8m~1.0m,此球體中心為海上燈樁的瞄準點,球體中心距海上燈樁平臺高度不小于 5m,距海面高度不小于 10m,支撐球體的立柱直徑不超過10cm,以利于光電跟蹤儀的自動跟蹤。
2.2 標定場地測量基準點的選擇
2.2.1方位角標定測量基準點的選擇
標定場地測量基準點的選擇要因地制宜,首先在碼頭陸地一側選取若干點,定義為測量點 c1、c2、……cn,選擇的點位基本在同一直線上并與碼頭走向平行,在高程上各測量點相同,測量時可根據艦艇在碼頭的實際停靠位置選擇不同的點位,為保證較好的通視性,測量點與 1#經緯儀架設點斜距離為100m~200m為宜。
2.2.2高低角標定測量基準點的選擇
測量點與我艦距離 2000m~3000m,與艦上各設備通視較好,我們定義其為A點。
2.3 標定場地測量坐標系的建立與測繪
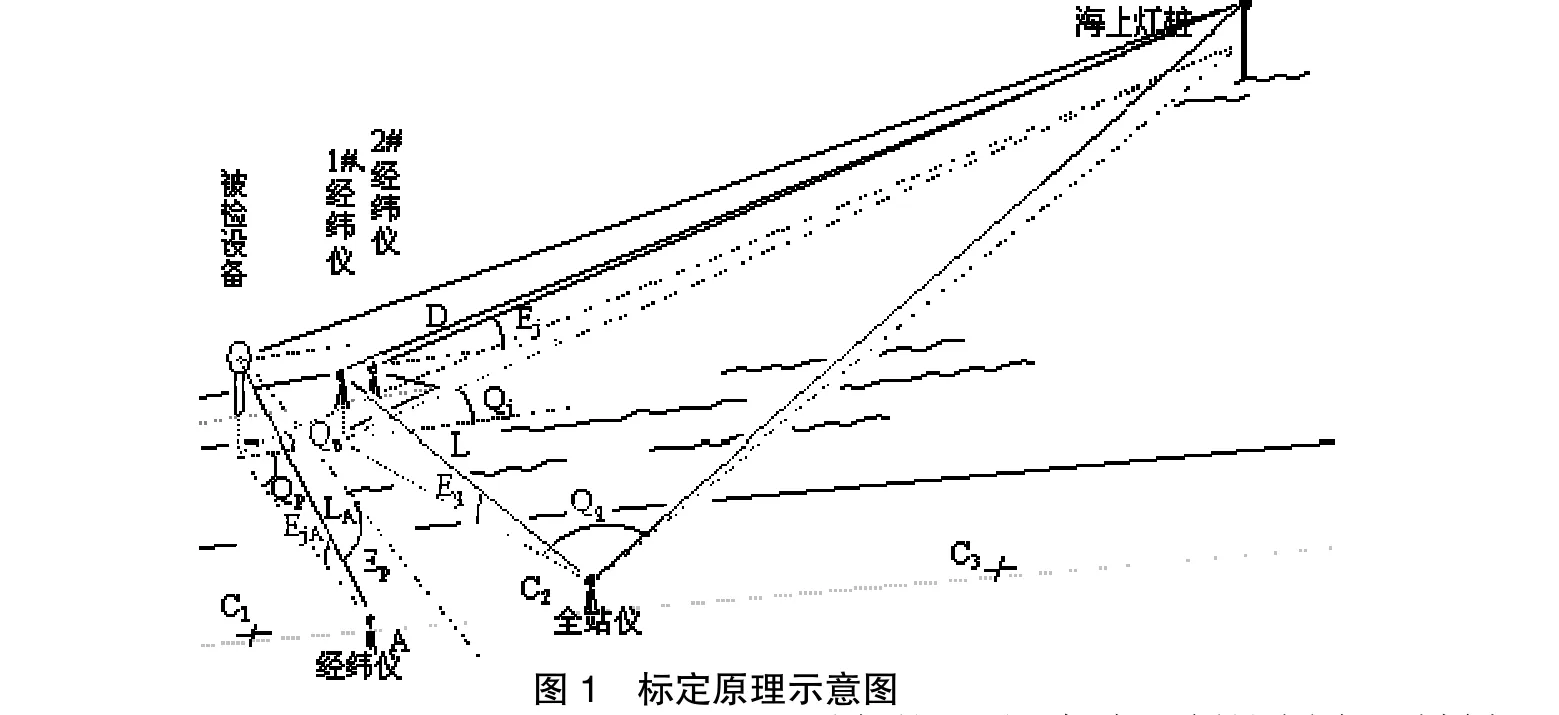
對測量點 c1、c2、……cn海上燈樁點位進行大地測量,并計算出每個測量點位與海上燈樁的水平距離及高低角。選擇標定場地一測量點(如c1點)為原點,Y軸為c1點與海上燈樁的連線,XY平面為水平面,Z軸垂直于水平面向上,建立標定場地直角坐標系。經計算得到海上燈樁在該坐標系中的三維坐標(Xh,Yh,Zh)。標定原理示意圖見圖1。
3 方位角零位標定
在系泊狀態下艦艇的航向、縱橫搖擺變化是隨機進行的,因此標定必須是在同一時刻點,各測量設備及被測量設備同時瞄準好目標的條件下完成的。
3.1 1#經緯儀架設點在標定場地測量坐標系中坐標的測量
在測量點c1點架設全站儀,首先全站儀瞄準海上燈樁,并將全站儀方位讀數置為0,然后再瞄準1#經緯儀望遠鏡的回轉中心,讀取方位角、高低角及斜距,根據測得的參數及燈樁坐標點數據,求取1#經緯儀架設點在標定場地坐標系中的坐標。
3.2 測量的組織與實施
艦炮安裝瞄星儀,手動控制艦炮、炮瞄雷達在方位上從一側進入,瞄準海上燈樁,光電跟蹤儀采用自動跟蹤方式跟蹤海上燈樁,1#經緯儀在方位上瞄準海上燈樁,2#經緯儀在高低上瞄準海上燈樁,全站儀瞄準經緯儀望遠鏡回轉中心,各設備同時瞄準好目標的同時,讀取各測量設備與被測量設備的相關參數。
3.3 方位角度誤差的計算
測量實施前我們已知參數:艦上經緯儀、艦炮、光電跟蹤儀、炮瞄雷達在艦艇相對不穩定直角坐標系的坐標;通過一次測量后,我們還可以知道以下參數:1#經緯儀、艦炮、光電跟蹤儀、炮瞄雷達瞄準海上燈樁的方位角,2#經緯儀瞄準海上燈樁的高低角,全站儀瞄準海上燈樁與1#經緯儀二點的方位夾角、瞄準1#經緯儀的斜距、高低角。下面僅以艦炮為例說明被測設備方位角度誤差的計算方法。
假設:1#經緯儀瞄準海上燈樁的方位角讀數值為QJ;2#經緯儀瞄準海上燈樁的高低角讀數值為EJ;艦炮瞄準海上燈樁的方位角讀數值為Qp;全站儀瞄準海上燈樁與 1#經緯儀二點的方位夾角為 Qq,瞄準艦上經緯儀的斜距為L,高低角為Eq;艦炮在艦艇相對不穩定坐標系中的坐標為(Xp,Yp,Zp);海上燈樁在標定場地測量坐標系中的坐標為(Xh,Yh,Zh),在艦艇相對不穩定直角坐標系中的坐標為(XB,YB,ZB)。
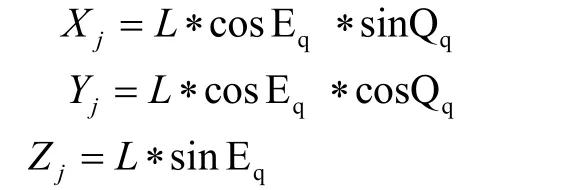
1#經緯儀在標定場地坐標系中的坐標為:
經緯儀與海上燈樁的斜距為D:

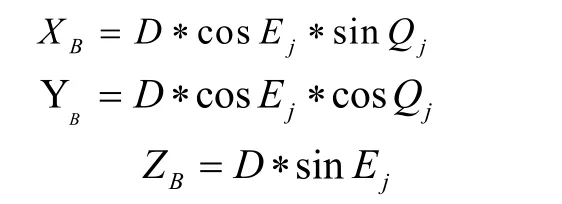
海上燈樁在艦艇相對不穩定直角坐標系中的坐標為,
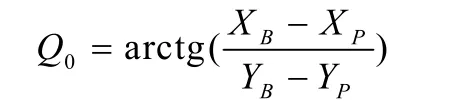
艦炮瞄準海上燈樁方位角理論值:
艦炮瞄準海上燈樁方位角誤差:
采用同樣的原理可以對艦炮進行高低角度的標定。下面介紹另一種方法對艦炮高低角度進行標定,這種方法更簡便快捷,動用外場的儀器設備更少,實施難度更小。
4 高低角零位標定
我們仍以艦炮為例,說明高低角度零位標定的方法,此時艦艇相對不穩定直角坐標系的原點設為艦炮回轉中心,其它定義不變。
在A點架設一臺經緯儀,艦炮安裝瞄星儀,艦基準平臺放置動態角度測量儀。艦炮與經緯儀對瞄,在同時瞄準好的瞬時,讀取艦炮的方位角、高低角(Qp,EP),經緯儀的高低角(EjA)、動態角度測量儀的艦艇縱、橫搖擺量(φ,θ),艦炮與經緯儀的斜線距離設為LA。
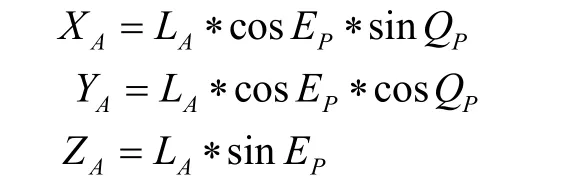
此時艦艇的縱橫搖擺量已知,經緯儀在艦艇不穩定直角坐標系中的方位角已知(艦炮方位角),高低角是未經標定的初略值,計算經緯儀在艦艇相對不穩定直角坐標系中的坐標時,可按艦炮高低角EP為初始值,代入公式中。
經緯儀在艦艇不穩定直角坐標系中的坐標為:
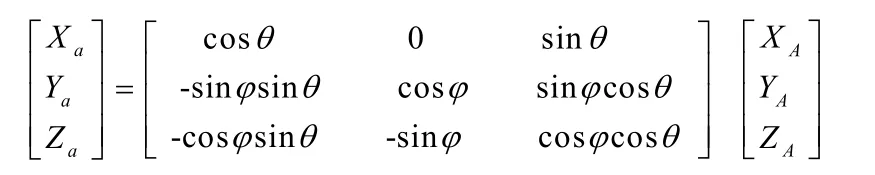
則經緯儀在艦艇穩定直角坐標系中的坐標為[2]:
經緯儀在艦艇穩定直角坐標系中的高低角為:
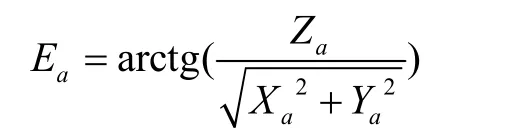
上述公式中,除LA為未知量外,其余均已知,在計算角Ea時,LA已消除,因此無需進行測量。
理論上Ea與EjA數值相等,符號相反,但由于在計算中代入了艦炮的高低角數據,而該數據是未經校準的數據,因此二者之間存在一個角度差。以EP為初始值,步長為 0.001mrad,采用迭代逼進的方法,重新計算Ea,直到二角誤差小于0.001mrad為止,此時艦炮的理論高低角我們定義EP0。
則艦炮在高低上的誤差為:
5 與瞄星的精度比對分析
5.1 方位角測量誤差的比對分析
此方法與瞄星方法相比存在以下誤差:1)海上燈樁與測量基準點c1點的相對位置測量誤差,通過大地測量,其點位誤差為AXh=5cm,AYh=5cm,AZh=5cm;2)1#經緯儀架設點與測量基準點c1點相對位置誤差,AXj=5cm,AYj=5cm,AZj=5cm;3)艦上被測量設備在艦上的安裝相對位置誤差,此誤差為毫米級,可忽略不計;4)被測量設備的光學設備與該設備的回轉中點位置誤差,此誤差可以通過設備結構參數進行修正,修正后誤差可忽略不計;5)2#經緯儀與 1#經緯儀高低角度測量誤差,由于二臺經緯儀架設距離小于2m,系泊條件下角度標定時艦艇的縱橫搖擺量不大于1°,因此,在高程上引起的線量誤差最大值不超過3.5mm,相對5km的目標而言,其高低角量誤差可以忽略不計。由于海上燈樁在艦艇相對不穩定直角坐標系中的方位、高低角標定前無法知曉,誤差計算時以最大誤差記,則AD=15cm,AXB=10cm,AYB=10cm,AZB=10cm。綜合考慮以上因素,對5km的海上燈樁進行瞄準,此方法與瞄星方法相比,其方位最大角量誤差不大于0.04mrad,因此,采用此方法進行方位角度標定是滿足精度要求的。
5.2 高低角測量誤差的分析
此方法與瞄星方法相比,只存在被測設備光學望遠鏡與回轉中心點高程位置的誤差。對該誤差進行修正后,其測量精度與瞄星方法相當。
6 結束語
艦炮武器系統角度零位一致是保證系統海上動態精度、射擊精度的基礎。傳統的瞄星方法巧妙地克服了各設備間的基線測量誤差問題,但無法回避現場的天氣環境。利用瞄星的原理,依托靶場的大地測量手段和測量設備的優勢,在系泊條件下對艦炮武器系統的角度零位一致性進行檢查,創造性地設計出新的試驗方案,是十分必要的。該方法是對瞄星方法的補充與完善,具有明顯的軍事和經濟效益。
[1]許秉信.艦炮武器系統試驗技術[M].連云港:江蘇自動化研究所,2002.
[2]胡志強,許秉信. 艦炮武器系統零位檢測與規正方法[J].火力與指揮控制,2007,32(4):81-84.
[3]汪德虎,譚周壽,王建明,等. 艦炮射擊基礎理論[M].北京:海潮出版社,1998.
[4]丁德勇,康酈,王武成. 水面艦艇電子武備基座水平度的檢驗與修正[J].情報指揮控制系統與仿真技術,2004,26(6):70-73.
[5]黃守訓,等. 艦炮武器系統試驗與鑒定[M].北京:國防工業出版社,2005.
猜你喜歡
環球時報(2022-12-30)2022-12-30 15:15:00
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
消費者報道(2014年7期)2014-07-31 11:23:57
