彈性限位浮筏隔振系統(tǒng)的動力學(xué)建模與算法
2010-06-21 01:02:46溫建明
船舶力學(xué) 2010年5期
溫建明,馮 奇
(同濟大學(xué)航空航天與力學(xué)學(xué)院,上海200092)
彈性限位浮筏隔振系統(tǒng)的動力學(xué)建模與算法
溫建明,馮 奇
(同濟大學(xué)航空航天與力學(xué)學(xué)院,上海200092)
文章從接觸動力學(xué)的角度,建立多自由度多彈性限位浮筏隔振系統(tǒng)的動力學(xué)模型,采用人工神經(jīng)網(wǎng)絡(luò)算法用于判別限位器的接觸狀態(tài)。實例分析指出,神經(jīng)網(wǎng)絡(luò)算法接觸判別的時間大大縮短,接觸計算得以實現(xiàn)。得出了對工程有指導(dǎo)意義的結(jié)論:限位器單向約束時,筏體和設(shè)備的最大位移與限位器之間存在最優(yōu)間隙。限位器雙向約束時,筏體的最大位移與限位器之間存在最優(yōu)間隙,而設(shè)備的最大位移隨著限位器的間隙增大而增大。限位器間隙對系統(tǒng)的影響與限位器的約束狀態(tài)有關(guān)。
浮筏;彈性限位;人工神經(jīng)網(wǎng)絡(luò)
1 引 言
含有限位器的浮筏隔振系統(tǒng)的抗沖擊研究是一個涉及到非線性動力學(xué),多自由度非線性系統(tǒng)建模、多剛體動力學(xué)、計算機仿真和優(yōu)化等多種學(xué)科大分析計算問題。目前,國內(nèi)外的研究比較集中在理論研究和試驗研究相結(jié)合[1-2]。帶限位器的浮筏系統(tǒng)在受到?jīng)_擊作用時,限位器與設(shè)備之間的接觸狀態(tài)隨著系統(tǒng)的振動會發(fā)生變化,這樣就必須采用接觸動力學(xué)模型描述,考慮撞擊時間以及接觸力。目前,對彈性限位器進行的非線性動力學(xué)研究主要都集中在單自由度系統(tǒng)[3-6],對實際問題分析時主要借助于數(shù)值算法。Pfeiffer[7-8]建議采用拉格朗日乘子,將接觸力預(yù)先乘入相應(yīng)的雅可比矩陣,加在無接觸的動力學(xué)方程上,并歸之于LCP問題。Feng[9]提出了采用人工神經(jīng)網(wǎng)絡(luò)算法求解單邊接觸動力學(xué)問題,并通過索結(jié)構(gòu)的計算得到了很好的驗證。本文從接觸動力學(xué)的角度,建立多自由度多彈性限位浮筏隔振系統(tǒng)的動力學(xué)模型,將人工神經(jīng)網(wǎng)絡(luò)算法用于判別限位器的接觸狀態(tài)。實例分析指出,神經(jīng)網(wǎng)絡(luò)算法接觸判別的時間大大縮短,接觸計算得以實現(xiàn)。同時研究了單向限位和雙向限位兩種限位狀態(tài)下限位器間隙對浮筏系統(tǒng)受沖擊情況下的影響。
2 彈性限位浮筏隔振系統(tǒng)的運動微分方程的建立
具有多個彈性限位器的浮筏隔振系統(tǒng)的簡化模型如圖1所示,浮筏隔振系統(tǒng)中的每個物體都看作具有六個自由度的剛體,隔振器簡化為三向剛度的彈性元件,假設(shè)剛體轉(zhuǎn)動時為小角度轉(zhuǎn)動,取每個剛體的質(zhì)心位移和卡爾丹角為廣義坐標(biāo):
xi,yi,zi,αi,βi,γii=1,2,…

2.1 多剛體浮筏隔振系統(tǒng)的運動方程
對于隔振系統(tǒng)中的每一個物體,利用牛頓-歐拉方程,有如下形式[7]:


對于系統(tǒng)引入比例阻尼,產(chǎn)生系統(tǒng)的振動方程為:


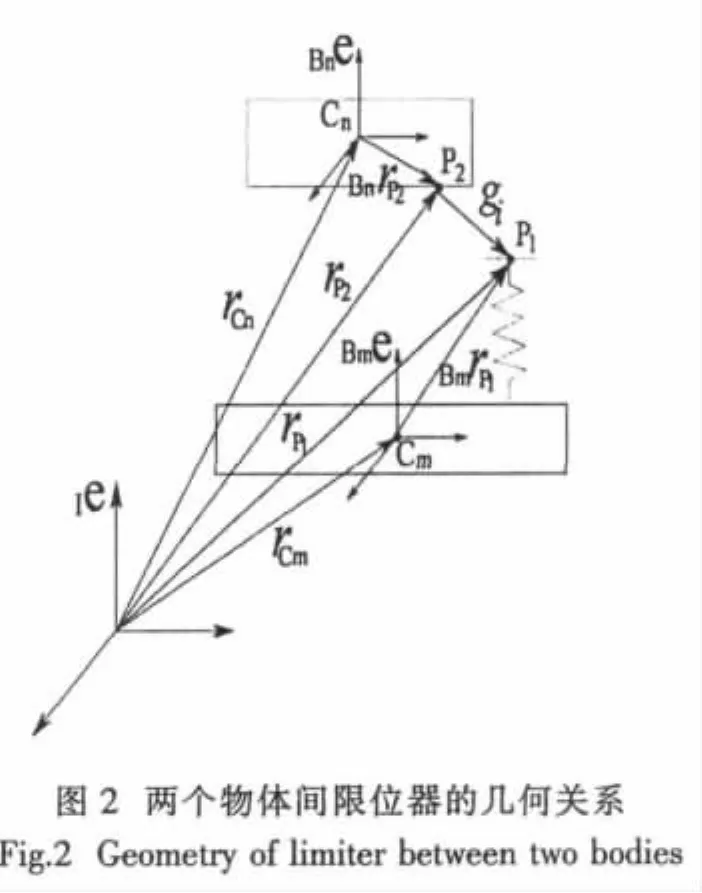
2.2 彈性限位器的接觸
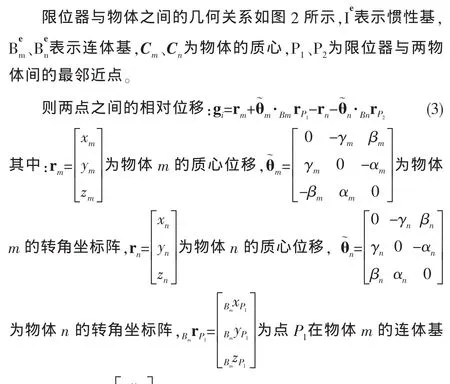
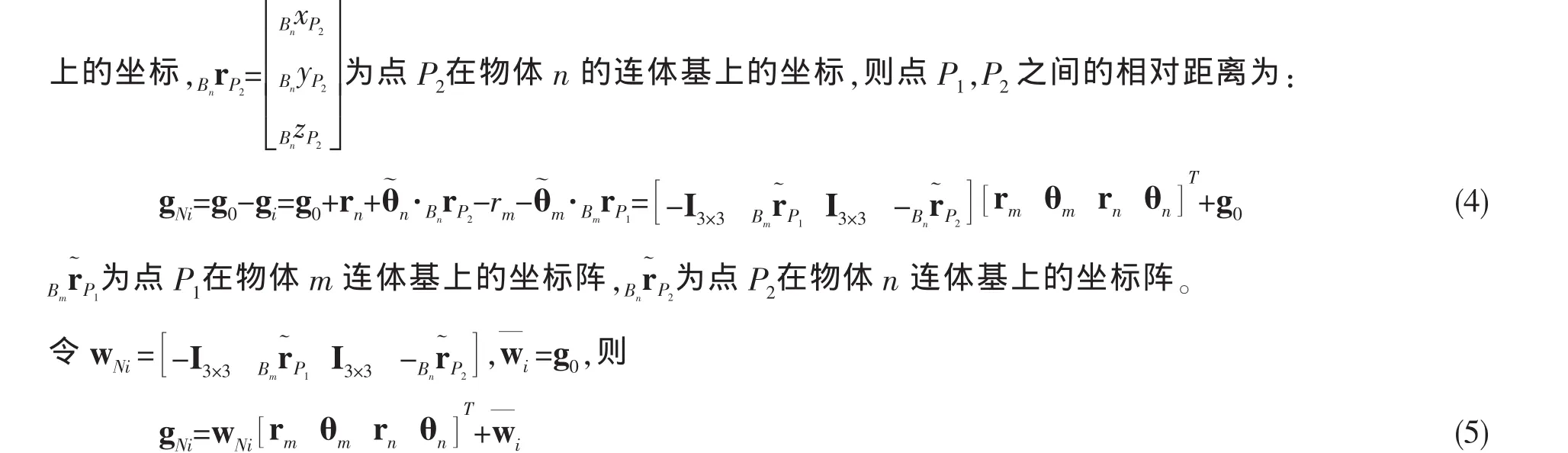
如果gNi>0,則物體n與限位器之間沒有接觸;如果gNi=0,則物體n與限位器之間接觸;如果gNi<0,則物體n與限位器之間接觸并產(chǎn)生接觸力。因此接觸條件:


接觸力對物體m質(zhì)心的接觸力矩:

接觸力對物體n質(zhì)心的接觸力矩:

上式中,IBmA為物體m的連體基相對于慣性基的坐標(biāo)轉(zhuǎn)換陣,IBnA為物體n的連體基相對于慣性基的坐標(biāo)轉(zhuǎn)換陣。
一般地,如果有k個限位器,則每一個限位器最鄰近點的距離都可以寫成:

q為系統(tǒng)的廣義坐標(biāo),由于wNi,i均為與時間無關(guān)的量,因此最鄰近點的相對速度和相對加速度可寫為:

用向量和矩陣的形式表示為:

2.3 含有接觸力的浮筏隔振系統(tǒng)的運動微分方程
如果浮筏隔振系統(tǒng)在受到?jīng)_擊作用,運動范圍超出了其限位器的約束空間,此時彈性限位器與剛體發(fā)生接觸,在隔振系統(tǒng)的運動方程中必須添加相應(yīng)的接觸力和接觸力矩。設(shè)某時刻t,有nk個限位器發(fā)生接觸,則添加接觸力后的運動方程可寫為:

另λNj=,表示接觸力的大小,將上述方程進行整理,則運動微分方程可寫為:

由于限位器只能承受壓力,因此接觸力向量λN中所有元素必須非負(fù),即λN≥0。此外,接觸點的相對加速度也必須非負(fù),否則非穿透條件則不能滿足。如果<0,則意味著接觸終止,其接觸力相應(yīng)地消失。如果=0,則物體仍舊保持著接觸,接觸力的大小λN≥0。因此對接觸點存在著互補條件:

結(jié)合運動微分方程,系統(tǒng)可得到一個線性互補問題:


3 接觸狀態(tài)的決策
由于在浮筏隔振系統(tǒng)中存在的限位器比較多,當(dāng)有多個可能的接觸點存在時,接觸的可能位形也有許多種可能。根據(jù)文獻[7]可知,方程(17)的線性互補問題可以等價為優(yōu)化問題,神經(jīng)網(wǎng)絡(luò)把優(yōu)化問題中的目標(biāo)函數(shù)約束條件與Hopfield的能量函數(shù)聯(lián)系起來,那么電路達(dá)到的平衡點就是能量函數(shù)極小點,也是優(yōu)化中滿足約束條件下的目標(biāo)函數(shù)的極小點。由于人工神經(jīng)網(wǎng)絡(luò)是并行計算,其計算時間不隨維數(shù)的增加而發(fā)生指數(shù)性質(zhì)的“爆炸”,因此用于判別限位器的接觸狀態(tài)很有效。
3.1 優(yōu)化問題的目標(biāo)函數(shù)
優(yōu)化問題的關(guān)鍵是構(gòu)造目標(biāo)函數(shù),在此利用高斯原理構(gòu)造目標(biāo)函數(shù)如下:

3.2 神經(jīng)網(wǎng)絡(luò)算法
根據(jù)要求的目標(biāo)函數(shù),設(shè)計Hopfield能量函數(shù)[10]E,令V=μ


Ri為電路中的電阻,令Ri=1,狀態(tài)變量Z與輸出變量V的關(guān)系為一硬函數(shù):
寫成離散的反饋式網(wǎng)絡(luò)為:

上述方程構(gòu)成了神經(jīng)網(wǎng)絡(luò)的計算公式。網(wǎng)絡(luò)參數(shù)W(t ),I(t)的具體表達(dá)式為:

4 實例分析
浮筏隔振系統(tǒng)的筏體、設(shè)備的參數(shù)如表1。
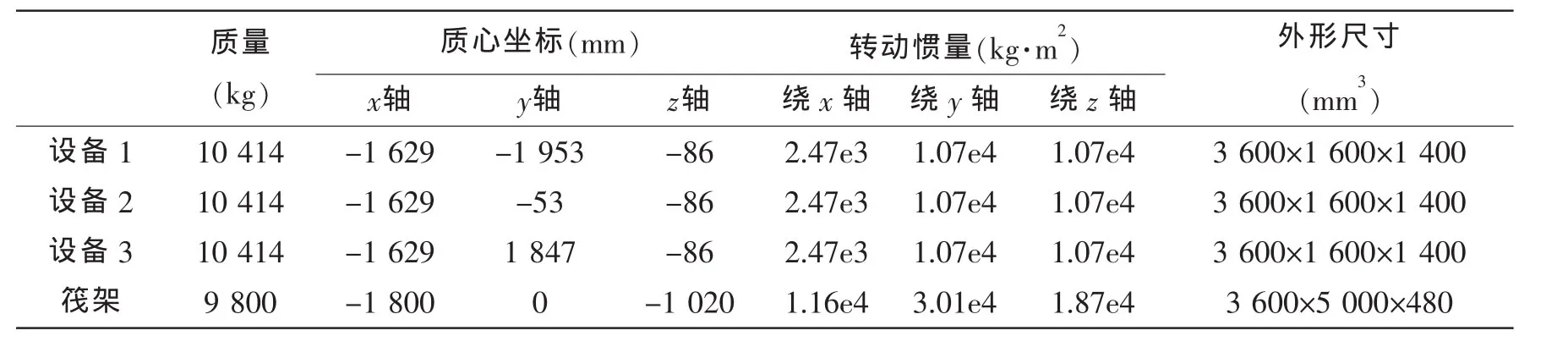
表1 浮筏基本參數(shù)Tab.1 Basic parameters of floating raft
上層組件共安裝3×10只減振器和3×6只抗沖擊限位器,減振器縱向剛度:1 715kN/m,橫向剛度:1 715kN/m,垂向剛度:3 435kN/m。下層組件共安裝3×12只減振器和3×6只抗沖擊限位器,減振器縱向剛度:1 880kN/m,橫向剛度:1 880kN/m,垂向剛度:3 760kN/m。下層限位器安裝在基礎(chǔ)上,上層限位器安裝在筏體上,限位器的剛度取為隔振器的0.7倍,沖擊作用的沖擊加速度為50gsin 350()τ,沖擊時間為6ms。單向限位時限位器間隙為g0,雙向限位時限位器間隙為±g0。g0≥()0 。文中采用Matlab語言編制程序?qū)崿F(xiàn)人工神經(jīng)網(wǎng)絡(luò)對限位器接觸狀態(tài)的決策[11]。
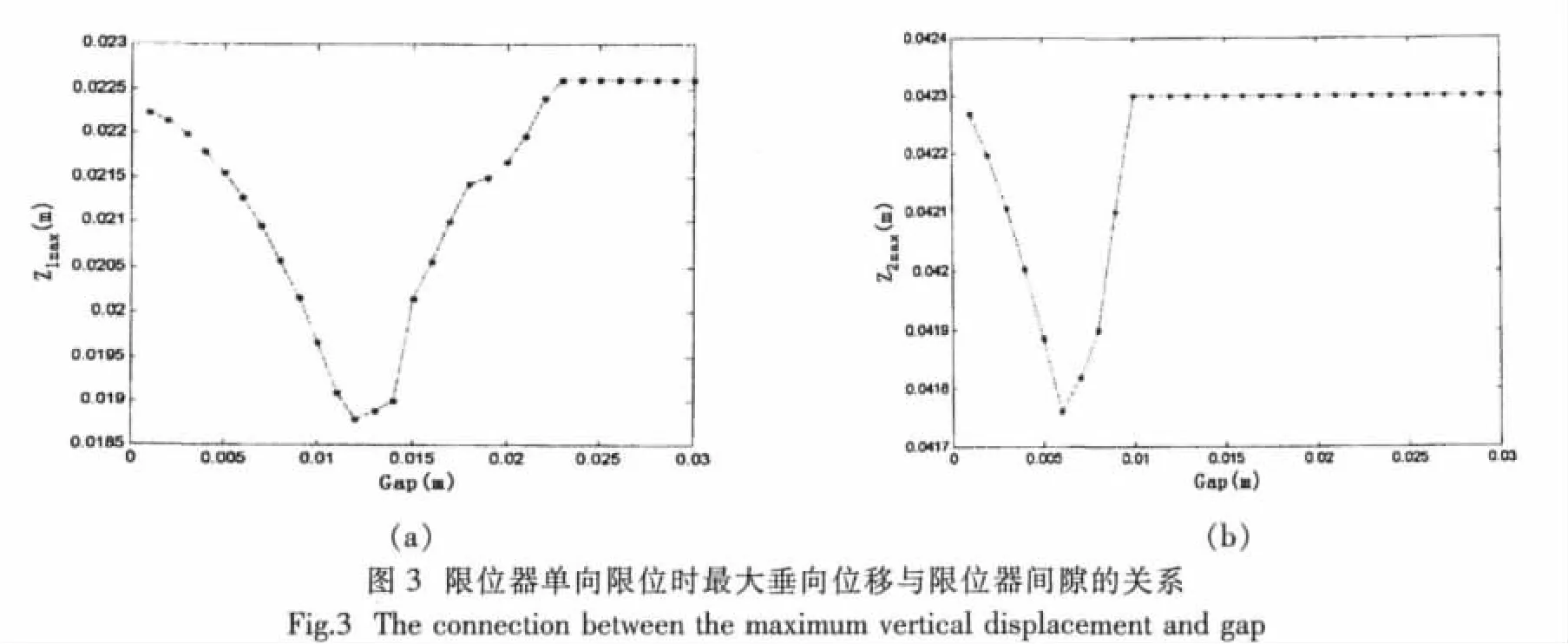
圖3表示限位器單向限位時,浮筏隔振系統(tǒng)的沖擊最大垂向位移與限位器間隙的關(guān)系,(a)為筏體的最大垂向位移與限位器間隙的關(guān)系,(b)為設(shè)備1的最大垂向位移與限位器間隙的關(guān)系,橫坐標(biāo)為限位器的間隙,縱坐標(biāo)為最大垂向位移,z1max表示筏體的最大垂向位移,z2max設(shè)備1的最大垂向位移,可以看出,對筏體來說,沖擊時最大垂向位移的最小值發(fā)生在限位器間隙為12mm的情況下,而當(dāng)限位器間隙大于22mm時,限位器不起作用,為無限位器下的最大位移。而對于設(shè)備1來說,沖擊最大垂向位移的最小值發(fā)生在限位器間隙為7mm,而當(dāng)限位器間隙大于12mm時,限位器不起作用。因此,對于設(shè)計限位器間隙時,筏體的限位器間隙與設(shè)備的限位器間隙應(yīng)分別設(shè)置,筏體的限位器間隙應(yīng)大于設(shè)備的限位器間隙。這是由于筏體的限位器限制的是筏體的絕對位移,而設(shè)備的限位器限制的是設(shè)備與筏體的相對位移。
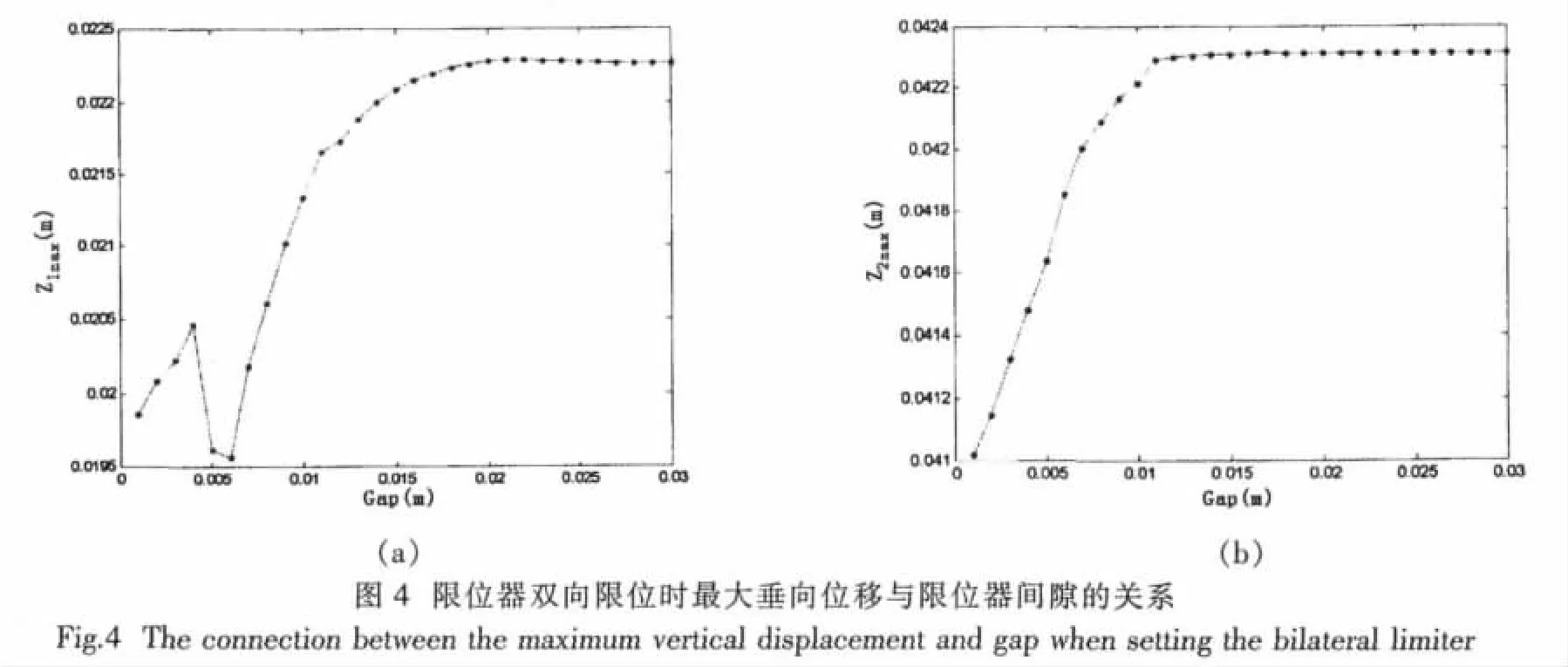
圖4表示限位器雙向限位時,浮筏隔振系統(tǒng)的沖擊最大垂向位移與限位器間隙之間的關(guān)系圖。圖中橫坐標(biāo)為限位器的間隙,縱坐標(biāo)為最大垂向位移,z1max表示筏體的最大垂向位移,z2max為設(shè)備1的最大垂向位移。可以看出,對于筏體來說,垂向最大位移在間隙為6mm的情況下達(dá)到了最小值。隨著間隙的增大,垂向位移的最大值也在增大,當(dāng)限位器間隙達(dá)到20mm時,限位器不再起作用。對于設(shè)備來說,隨著限位器的間隙增大,垂向位移也增大。設(shè)備1當(dāng)限位器間隙超過11mm時,限位器不起作用。雙向限位器間隙對系統(tǒng)的影響與單向限位器間隙的影響是不同的。
5 結(jié) 論
本文建立了多自由度多彈性限位浮筏抗沖隔振系統(tǒng)的動力學(xué)運動微分方程,將人工神經(jīng)網(wǎng)絡(luò)算法用于判別限位器的接觸狀態(tài)。實例分析指出,神經(jīng)網(wǎng)絡(luò)算法的計算時間為直接搜索計算時間的1/1 000,接觸判別的時間大大縮短。同時研究了單向限位和雙向限位兩種限位狀態(tài)下限位器間隙對浮筏系統(tǒng)受沖擊情況下的影響,指出了限位器單向約束時,筏體和設(shè)備的最大位移與限位器之間存在最優(yōu)間隙,筏體的最優(yōu)間隙與設(shè)備的最優(yōu)間隙是不同的,應(yīng)分別設(shè)置。限位器雙向約束時,筏體的最大位移與限位器之間存在最優(yōu)間隙,而設(shè)備的最大位移隨著限位器的間隙增大而增大。限位器間隙對系統(tǒng)的影響與限位器的約束狀態(tài)有關(guān)。
[1]William T F.UNDEX testing:When,why&how it began[C]//Proceedings of the 70th Shock and Vibration Symposium,Albuquerque,New Mexico,USA,1999:15-19.
[2]Van Ananhold J E,Meijer G J,Lemmen P P M.Under shock response analysis of a floationg vessel[J].Shock and Vibration,1998,5:53-59.
[3]胡海巖.隔振系統(tǒng)限位器的非線性動力學(xué)設(shè)計[J].航空學(xué)報,1996,17(5):529-533.
[4]Narayanan S,Sekar P.Periodic and chaotic responses of an SDF system with piecewise linear stiffness subjected to combined harmonic and flow induced excitations[J].Journal of Sound and Vibration,1995,184(2):281-298.
[5]Chicurel-Uziel E.Exact,single equation,closed-form solution of vibrating systems with piecewise linear springs[J].Journal of Sound and Vibration,2001,245(2):285-301.
[6]Chatterjee S,Malik A K,Ghosh A.Periodic response of piecewise non-linear oscillators under harmonic excitation[J].Journal of Sound and Vibration,1996,191(1):129-144.
[7]Pfeiffer F,Glocker C.Multibody dynamics with unilateral contacts[M].Cambridge,UK:Wiley,1996.
[8]Pfeiffer F.Mechanical system dynamics[M].New York:Springer,2008.
[9]Feng Q,Tu J.Modeling and algorithm on a class of mechanical systems with unilateral constraints[J].Archive of Applied Mechanics,2006,76(1-2):103-116.
[10]張立明.人工神經(jīng)網(wǎng)絡(luò)的模型及其應(yīng)用[M].上海:復(fù)旦大學(xué)出版社,1993.
[11]葛哲學(xué),孫志強.神經(jīng)網(wǎng)絡(luò)理論與MATLAB R2007實現(xiàn)[M].北京:電子工業(yè)出版社,2007.
Model and algorithm for floating raft with elastic limiters
WEN Jian-ming,FEN Qi
(School of Aerospace Engineering and Applied Mechanics,Tongji University,Shanghai 200092,China)
Based on contact dynamics,the multi-degree-freedom dynamic model of floating raft isolation system with elastic limiters was established.The artificial neural network was used to dingtinguish the contact state of elastic limiters.The example analysis showed that the algorithm of artificial neural network for contact shortened the time of caclaution.The contact calculation could be realized.Some interesting results may be useful to the actual engineerings:for setting an unilateral limiter to the system,there is a best gap corresponding to the displacement of the raft and equipments.Setting the bilateral limiter to the system,there is a best gap corresponding to the raft.On the other hand,the maximum displacement of the equipment is increased with the limiter’s gap.The influence of gap for floating raft is concern of the constraints’status.
floating raft;elastic limiter;artificial neural network
032
A
1007-7294(2010)05-0549-07
2009-05-23
國家自然科學(xué)基金(10702051):隨機非光滑系統(tǒng)中的摩擦和接觸研究(Friction and contact in stochastic nonsmooth system);上海市重點學(xué)科建設(shè)項目資助(B302)
溫建明(1972-),女,同濟大學(xué)航空航天與力學(xué)學(xué)院副教授,wenjianming@tongji.edu.cn。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
經(jīng)濟技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
