被動(dòng)全向浮標(biāo)HYFIX定位精度仿真分析
2010-06-05 09:14:58孫明太劉京蓮
電光與控制 2010年1期
孫 輝,孫明太,劉京蓮
(1.海軍青島裝備技術(shù)質(zhì)量監(jiān)測(cè)站,山東 青島 266071;2.海軍航空工程學(xué)院青島分院,山東 青島 266041)
0 引言
被動(dòng)全向浮標(biāo)是聲納浮標(biāo)系列中最簡(jiǎn)單的一種,具有體積小、重量輕、造價(jià)低、方便大量攜帶等優(yōu)點(diǎn),成為反潛平臺(tái),特別是反潛巡邏機(jī)搜潛作戰(zhàn)中使用最多的探測(cè)器材。因此對(duì)其定位精度的研究有著較大的實(shí)際應(yīng)用價(jià)值。
1 HYFIX定位原理
當(dāng)潛艇急劇轉(zhuǎn)向、變速時(shí),浮標(biāo)接收到的輻射噪聲頻率會(huì)發(fā)生較大偏移,由于潛艇與每個(gè)浮標(biāo)之間的距離不同,各個(gè)浮標(biāo)檢測(cè)到的偏移會(huì)有一個(gè)時(shí)間差(即時(shí)延)(如圖1所示)。因此HYFIX(Hyperbolic Fixing)要求2枚以上被動(dòng)全向浮標(biāo)同時(shí)探測(cè)到目標(biāo),才能根據(jù)時(shí)延來(lái)確定目標(biāo)潛艇位置。
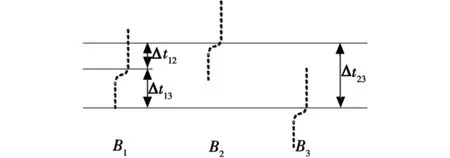
圖1 浮標(biāo)檢測(cè)目標(biāo)噪聲變化時(shí)延示意圖Fig.1 Sketch map of time-delay when sonobuoy detecting target noise
由于水下同一深度的海水聲速相同,突變的目標(biāo)潛艇噪聲到達(dá)兩枚浮標(biāo)的時(shí)間差可由式(1)換算成距離差

式中:c為水中聲速。
由解析幾何可知,到兩定點(diǎn)的距離之差為常數(shù)的動(dòng)點(diǎn)的軌跡為一組雙曲線,則3枚浮標(biāo)兩兩組合可以確定3組雙曲線,這3組雙曲線的交點(diǎn)(準(zhǔn)確地講應(yīng)該是一個(gè)三角形)即為目標(biāo)潛艇的位置點(diǎn)。
設(shè)在直角坐標(biāo)系中,被測(cè)目標(biāo)潛艇S(x,y)與各浮標(biāo)探測(cè)點(diǎn) B1(x1,y1)、B2(x2,y2)、B3(x3,y3)的幾何位置如圖2所示。
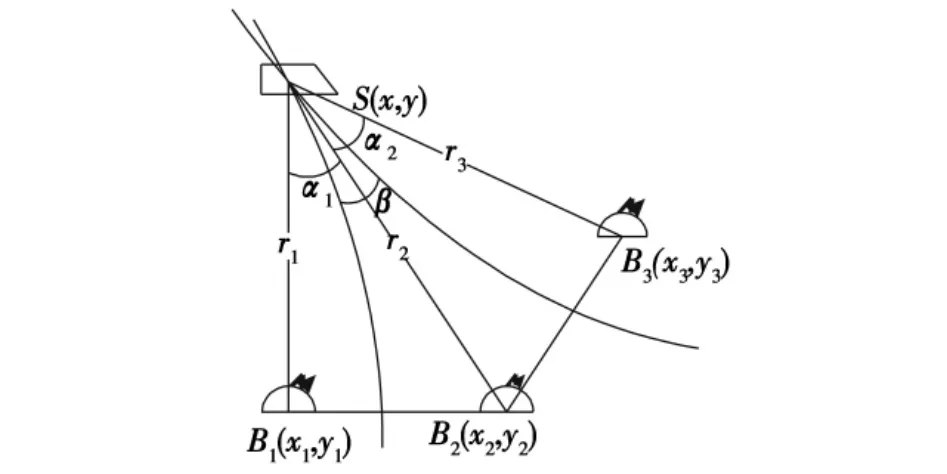
圖2 被動(dòng)全向浮標(biāo)HYFIX定位原理圖Fig.2 Locating principle of HYFIX for passive sonobuoy
根據(jù)雙曲線定位原理,被探測(cè)目標(biāo)潛艇點(diǎn)聲源位置S點(diǎn)的位置坐標(biāo)理論上可由下列方程組確定為

其中:r2-r1=c·Δt1;r3-r2=c·Δt2;ri為各個(gè)探測(cè)浮標(biāo)到目標(biāo)潛艇的距離。
從上式可以看出,目標(biāo)潛艇的位置點(diǎn)與各個(gè)探測(cè)浮標(biāo)的坐標(biāo)、浮標(biāo)到目標(biāo)潛艇之間的距離,以及各枚浮標(biāo)接收到聲信號(hào)的時(shí)間差有關(guān)系。因此,在HYFIX定位精度的分析中,將主要研究浮標(biāo)位置點(diǎn)誤差和系統(tǒng)測(cè)時(shí)誤差對(duì)定位精度的影響。
2 HYFIX定位誤差模型
在實(shí)際定位中,浮標(biāo)接收聲信號(hào)受到環(huán)境和系統(tǒng)中許多因素的影響,對(duì)兩枚浮標(biāo)接收信號(hào)時(shí)間差的測(cè)量可能存在較大的誤差。同時(shí),反潛機(jī)導(dǎo)航系統(tǒng)精度、海區(qū)風(fēng)速以及流速等的影響,使反潛機(jī)測(cè)定的浮標(biāo)坐標(biāo)、浮標(biāo)布放間距也存在一定的誤差。由文獻(xiàn)[4]可知,綜合上述誤差后的定位誤差模型為

式中:β為兩條雙曲線的夾角(如圖2所示);αi為目標(biāo)潛艇到相鄰兩枚浮標(biāo)的夾角;Δti為測(cè)時(shí)誤差。
3 仿真實(shí)驗(yàn)
為了較真實(shí)地反映各浮標(biāo)實(shí)際位置點(diǎn)和系統(tǒng)測(cè)時(shí)誤差對(duì)定位精度的影響,每一次仿真實(shí)驗(yàn)都分別計(jì)算N=2000次,然后取其平均誤差ˉδ作為一次定位結(jié)果,從而減少偶然性對(duì)實(shí)驗(yàn)結(jié)果的影響。

3.1 仿真環(huán)境假設(shè)
1)在3級(jí)海況下,目標(biāo)潛艇噪聲到各枚浮標(biāo)的聲傳播速度相同,取c=1500 m/s;
2)反潛機(jī)布放浮標(biāo)時(shí)所設(shè)定投放間隔時(shí)間相同,即相鄰兩枚浮標(biāo)理論投放間隔d是相等的;
3)以中間一枚浮標(biāo)B1為原點(diǎn),以B1B2的連線為x軸,建立如圖3所示的直角坐標(biāo)系,第3枚浮標(biāo)B3是取自以B1為圓心,以d為半徑的圓上的任意一點(diǎn);

圖3 仿真實(shí)驗(yàn)所用坐標(biāo)系Fig.3 Reference frame used in simulation experiment
4)浮標(biāo)的作用區(qū)域是以浮標(biāo)為圓心,以浮標(biāo)作用距離為半徑的圓;
5)虛解的剔除方法:所求實(shí)數(shù)交點(diǎn)S(x,y)到任一浮標(biāo)坐標(biāo)的距離di小于浮標(biāo)作用距離ds;
6)在實(shí)際定位中,由于飛機(jī)導(dǎo)航誤差以及風(fēng)、流等海洋環(huán)境的影響,飛機(jī)對(duì)浮標(biāo)的定位是存在誤差的,主要體現(xiàn)在對(duì)浮標(biāo)間距d的測(cè)量上,假設(shè)該測(cè)距誤差服從均值是d,方差是1000的正態(tài)分布;
7)鑒于在實(shí)際定位中,測(cè)時(shí)誤差大致在0.4~1.0 μs之間,故假設(shè)所有測(cè)時(shí)誤差都服從均值為0.64 μs,方差為0.1的正態(tài)分布;
8)計(jì)算機(jī)仿真編程時(shí),時(shí)間差Δt1為外層循環(huán)變量,時(shí)間差Δt2為內(nèi)層循環(huán)變量。
3.2 定位精度分析
在仿真實(shí)驗(yàn)中,以中間一枚浮標(biāo) B1為原點(diǎn),以B1、B2的連線為x軸,建立如圖3所示的直角坐標(biāo)系,第3枚浮標(biāo)B3是取自以B1為圓心,以d為半徑的圓上的任意一點(diǎn),則由式(2)可知:

在文獻(xiàn)[6]中提及,在實(shí)際定位中,測(cè)時(shí)誤差大致在0.4~1.0 μs之間,故假設(shè)此次仿真實(shí)驗(yàn)所有的系統(tǒng)測(cè)時(shí)誤差都服從均值為0.64 μs,方差為0.1的正態(tài)分布。
1)測(cè)量時(shí)間差對(duì)定位誤差的影響。
當(dāng)浮標(biāo)作用距離ds=2000 m,浮標(biāo)布放間距d=ds,3枚浮標(biāo)夾角θ=30°時(shí),變化浮標(biāo)接收信號(hào)的時(shí)間差,得到浮標(biāo)測(cè)量時(shí)間差與定位精度的關(guān)系圖如圖4所示。
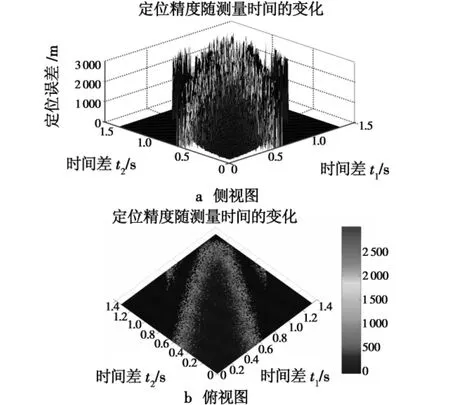
圖4 定位精度與測(cè)量時(shí)間差的關(guān)系圖Fig.4 Relation of locating precision and time difference
2)浮標(biāo)布放陣形對(duì)定位誤差的影響。
當(dāng)浮標(biāo)作用距離ds=2000 m,浮標(biāo)布放間距d=ds,3枚浮標(biāo)接收信號(hào)的時(shí)間差為Δt1=0.5 s,Δt2=0.5 s,變化3枚浮標(biāo)之間的夾角θ,得到浮標(biāo)陣形與浮標(biāo)定位精度的關(guān)系圖如圖5所示。
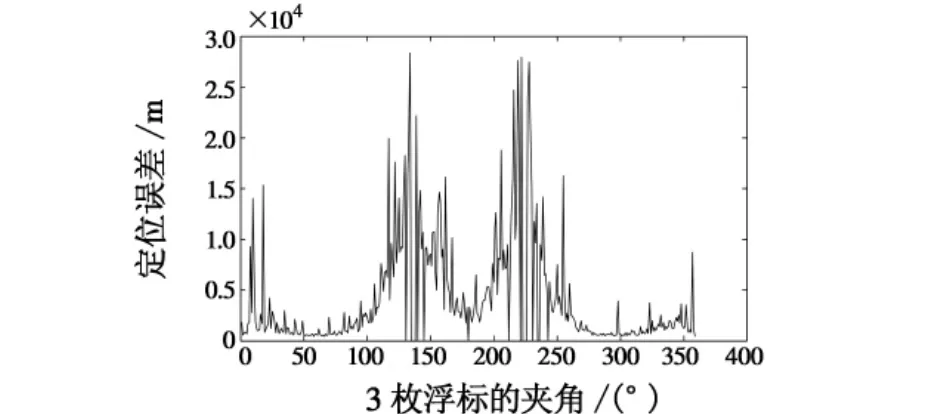
圖5 定位精度與浮標(biāo)布放陣形的關(guān)系圖Fig.5 Relation of locating precision and sonobuoy deployment array
3)浮標(biāo)布放間距對(duì)定位誤差的影響。
當(dāng)浮標(biāo)作用距離ds=2000 m,3枚浮標(biāo)之間的夾角θ=60°,3枚浮標(biāo)接收信號(hào)的時(shí)間差為Δt1=0.7 s,Δt2=0.7 s,變化浮標(biāo)布放間距d,得到浮標(biāo)布放間距與定位精度的關(guān)系圖如圖6所示。
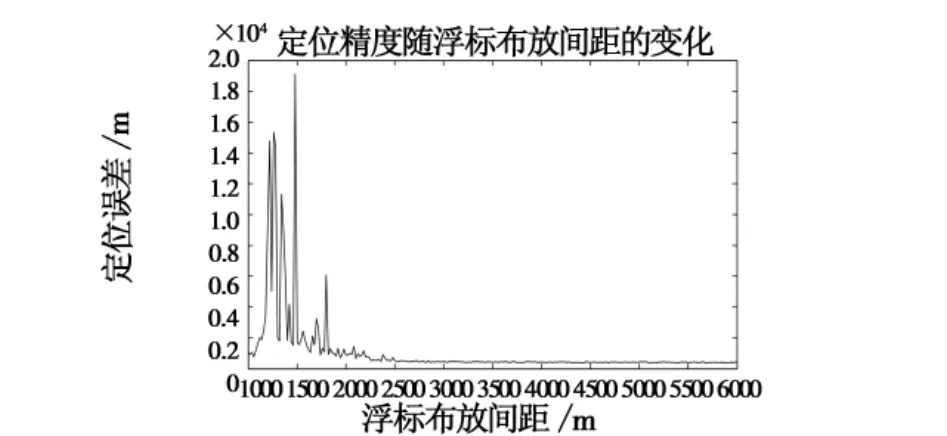
圖6 定位精度與浮標(biāo)布放間距的關(guān)系圖Fig.6 Relation of locating precision and of sonobuoy deployment space
由仿真所得關(guān)系圖4可以看出:當(dāng)浮標(biāo)接收信號(hào)時(shí)間差趨向于相等時(shí),浮標(biāo)的定位誤差越小。即以原點(diǎn)浮標(biāo)為基準(zhǔn),目標(biāo)潛艇到另兩枚浮標(biāo)的距離越趨近于相等,定位誤差越小。如圖7所示,當(dāng)潛艇接近于角平分線時(shí),定位誤差最小,而在實(shí)際應(yīng)用中也表明:當(dāng)目標(biāo)潛艇沿三角陣中線航行通過(guò)時(shí),浮標(biāo)陣對(duì)目標(biāo)潛艇的定位效果最好。
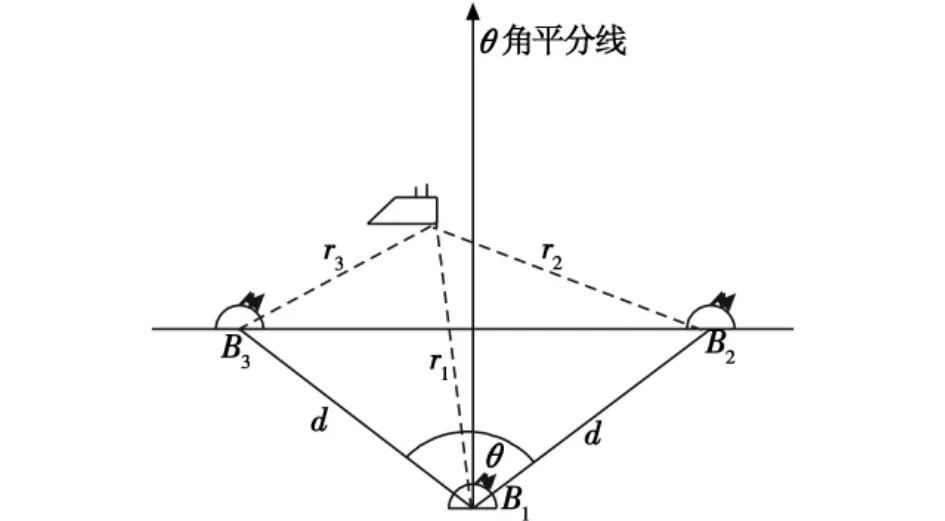
圖7 浮標(biāo)陣形示意圖Fig.7 Sketch map of sonobuoy deployment array
由圖5中的仿真結(jié)果可以看到定位精度與浮標(biāo)陣型是一個(gè)以180°為中心的對(duì)稱關(guān)系。當(dāng)浮標(biāo)布放夾角在30°~90°之間時(shí)定位誤差較小,之后會(huì)急劇增大;在接近180°時(shí),如果3枚浮標(biāo)同時(shí)能接收到信號(hào),則潛艇靠近中心浮標(biāo),定位誤差會(huì)有所下降。在實(shí)際應(yīng)用中也表明,如果浮標(biāo)聲納布放夾角由30°到180°變化,即陣型由三角陣變化為直線陣時(shí),定位精度會(huì)減小。從而驗(yàn)證了三角陣的定位精度要優(yōu)于直線陣的定位精度。
圖6所示,當(dāng)3枚浮標(biāo)之間距離太近時(shí)(1000 m 由于在搜潛定位的初始階段,目標(biāo)潛艇監(jiān)聽到浮標(biāo)入水的聲響,必然會(huì)作出劇烈的變向、變深、變速的反應(yīng),這一情況有利于運(yùn)用HYFIX定位目標(biāo)潛艇。如果增加保持接觸的浮標(biāo)數(shù)量,或者改變浮標(biāo)布放間隔和陣形(例如采用定位精度相對(duì)較高的三角陣)則可以改善這種定位方法。運(yùn)用連續(xù)的定位將給出一組越來(lái)越精確的潛艇運(yùn)動(dòng)要素估計(jì)值,既可以滿足攻潛武器的定位精度要求,又可以降低作戰(zhàn)成本,提高作戰(zhàn)效率。所以,通過(guò)以上的仿真分析可以知道,雖然HYFIX定位很難滿足攻潛武器的精度要求,絕大多數(shù)情況下需使用被動(dòng)定向浮標(biāo)或主動(dòng)浮標(biāo)進(jìn)一步精確定位,才能引導(dǎo)攻潛武器對(duì)潛艇進(jìn)行攻擊;但被動(dòng)全向浮標(biāo)相對(duì)于其他種類浮標(biāo)造價(jià)低、經(jīng)濟(jì)性好,在搜潛定位的初始階段使用,可以減少作戰(zhàn)費(fèi)用,因此,在搜潛定位的初始階段具有較大的應(yīng)用意義。 [1]孫明太.航空反潛概論[M].北京:國(guó)防工業(yè)出版社,1998. [2]孫明太.航空反潛戰(zhàn)術(shù)[M].北京:軍事科學(xué)出版社,2003. [3]蔡宗義,趙浚謂,許學(xué)忠,等.多基陣無(wú)源聲測(cè)定位算法的研究與仿真[J].火力與指揮控制,2004,29(4):79-82. [4]錢世平.偵察原理[M].西安:第二炮兵學(xué)院,1996. [5]費(fèi)業(yè)泰.數(shù)據(jù)分析與誤差理論[M].北京:機(jī)械工業(yè)出版社,1981. [6]顏喜中.反潛直升機(jī)聲納浮標(biāo)搜潛模型研究與分析[D].青島:海軍潛艇學(xué)院,2003. [7]趙緒明.航空搜潛戰(zhàn)術(shù)模型與仿真研究[D].煙臺(tái):海軍航空工程學(xué)院,2005. [8]董志榮.被動(dòng)聲納浮標(biāo)目標(biāo)運(yùn)動(dòng)分析數(shù)學(xué)模型[J].電光與控制,2006,28(6):31-34. [9]董志榮.水面艦艇立體反潛系統(tǒng)構(gòu)想[J].電光與控制,2008,15(5):12-15. [10]董志榮.舷側(cè)陣聲納浮標(biāo)目標(biāo)運(yùn)動(dòng)分析數(shù)學(xué)模型[J].電光與控制,2007,14(2):16-19. [11]董志榮.拖曳線列陣目標(biāo)運(yùn)動(dòng)分析數(shù)學(xué)模型[J].電光與控制,2007,14(5):34-42. [12]劉新愛.應(yīng)用仿真技術(shù)的空地導(dǎo)彈命中精度評(píng)定[J].電光與控制,2008,15(3):79-81.4 結(jié)論