兩軸穩(wěn)定平臺(tái)的模糊-PID復(fù)合控制器設(shè)計(jì)與仿真
2010-06-05 09:14:56李向旭張?jiān)?/span>
電光與控制 2010年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
李向旭,張?jiān)疲?敏
(1.清華大學(xué)自動(dòng)化系,北京 100084;2.蘇州大學(xué)電子信息學(xué)院,江蘇 蘇州 215021)
0 引言
兩軸光纖陀螺穩(wěn)定平臺(tái)的主要作用是穩(wěn)定雷達(dá)天線指向和跟蹤目標(biāo)移動(dòng)[1]。根據(jù)兩軸雷達(dá)穩(wěn)定平臺(tái)的結(jié)構(gòu)和原理[2-3],如果平臺(tái)機(jī)械結(jié)構(gòu)設(shè)計(jì)合理,就可以保證兩個(gè)通道之間的影響很小[4],這樣就可以忽略兩個(gè)通道之間的耦合。本文只討論俯仰通道控制器的設(shè)計(jì)。光纖陀螺作為速度測量元件與穩(wěn)定回路控制器Cs(s)、速度內(nèi)環(huán)和減速器閉環(huán)構(gòu)成穩(wěn)定回路。角位置傳感器作為角位置測量元件,與跟蹤回路控制器Cp(s)、穩(wěn)定回路和積分模塊閉環(huán)構(gòu)成跟蹤回路。
1 經(jīng)典控制器設(shè)計(jì)及仿真
由于所用電機(jī)的電樞電路總電感非常小,可以忽略電機(jī)電氣時(shí)間常數(shù)。根據(jù)電機(jī)方程,得到電機(jī)傳遞函數(shù)為

則速度內(nèi)環(huán)的傳遞函數(shù)為

其中:K為放大環(huán)節(jié)的放大倍數(shù),根據(jù)經(jīng)驗(yàn)取K=20。
1.1 穩(wěn)定回路經(jīng)典控制器設(shè)計(jì)及仿真
根據(jù)實(shí)際工作要求,穩(wěn)定回路開環(huán)截止頻率在200 rad/s左右,隔離度要求為If=0.5Hz<0.5%,If=1Hz<1%,If=3Hz<5%,f為外加干擾的頻率[5]。
根據(jù)以上要求,采用滯后超前校正法設(shè)計(jì)穩(wěn)定回路 PID 控制器[6]:

加入此控制器后,系統(tǒng)穩(wěn)定回路開環(huán)截止頻率為206 rad/s,相角穩(wěn)定裕度為59.2°,幅值穩(wěn)定裕度為38.2 dB。穩(wěn)定回路是穩(wěn)定的,開環(huán)截止頻率滿足要求。由圖1的Simulink模型仿真可得If=0.5Hz=0.08%,If=1Hz=0.35%,If=3Hz=2.8%,即穩(wěn)定回路控制器(3)滿足系統(tǒng)性能要求。
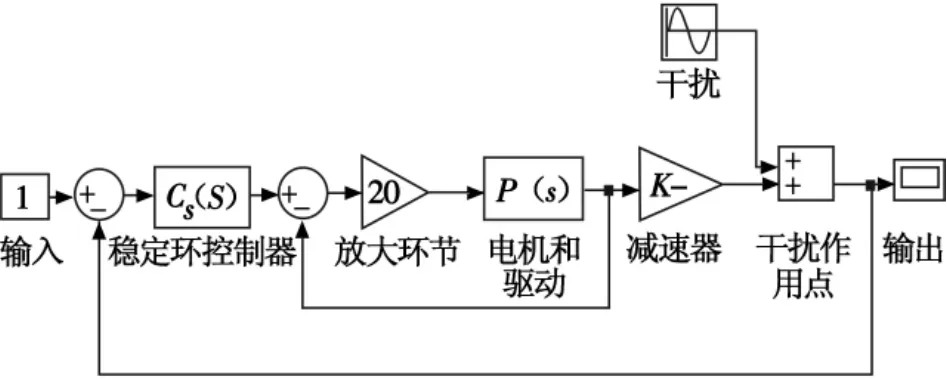
圖1 穩(wěn)定回路仿真模型Fig.1 Simulation model for the stable loop
1.2 跟蹤回路經(jīng)典控制器設(shè)計(jì)及仿真
跟蹤回路的輸入為目標(biāo)視線方向(LOS)角位置,穩(wěn)定平臺(tái)必須能夠快速準(zhǔn)確地跟蹤它的變化。實(shí)際系統(tǒng)要求單位階躍輸入響應(yīng)超調(diào)量σ<25%,過渡過程時(shí)間ts<0.2 s,穩(wěn)定誤差e(∞)=0,震蕩次數(shù) N≤2。為了避免引入高頻干擾,要求跟蹤回路開環(huán)截止頻率ωc≈50 rad/s。
采用滯后超前校正方法設(shè)計(jì)跟蹤回路PID控制器:

加入Cp(s)后跟蹤回路開環(huán)截止頻率為wc=54.2 rad/s,相角穩(wěn)定裕度為49.7°,幅值穩(wěn)定裕度為12.7 dB。跟蹤回路控制器(4)滿足跟蹤回路必須穩(wěn)定的要求。然而,跟蹤回路的單位階躍響應(yīng)為圖2所示的PID響應(yīng)曲線,系統(tǒng)的超調(diào)量σ=28%,過渡過程時(shí)間ts=0.145 s。系統(tǒng)階躍響應(yīng)的超調(diào)量超出了設(shè)計(jì)要求的范圍。因此,必須在保證開環(huán)截止頻率不變的基礎(chǔ)上降低階躍響應(yīng)超調(diào)量。
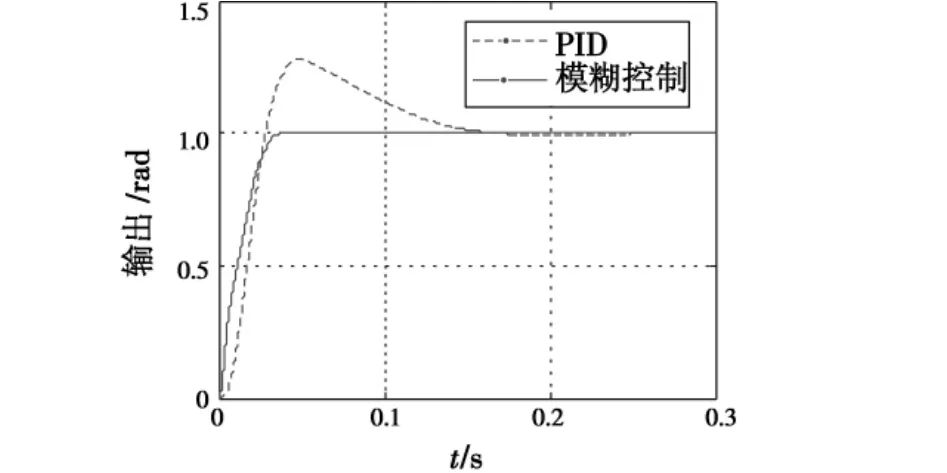
圖2 PID控制和模糊控制單位階躍響應(yīng)Fig.2 Unit step responses of the PID controller and fuzzy controller
2 遺傳算法設(shè)計(jì)位置模糊控制器
2.1 模糊控制器的結(jié)構(gòu)
為了解決1.2節(jié)中系統(tǒng)超調(diào)量過大的問題,本文進(jìn)一步采用兩維模糊控制器[7-8]。模糊控制器的輸入為誤差e和誤差的變化率ec,相應(yīng)的量化因子分別為ke和kec。線性變換E=kee將變量e從語言的基本論域映射到量化論域E。當(dāng)kee>6時(shí),令E=6;當(dāng)kee<-6時(shí),令E=-6。定義在量化論域E上的模糊子集為{NB,NM,NS,O,PS,PM,PB},其隸屬度函數(shù)如圖 3所示。EC=kecec與上述定義相同。EC和U上定義的模糊子集和各個(gè)子集對應(yīng)的隸屬度函數(shù)與E相同。

圖3 模糊控制器輸入變量的隸屬度函數(shù)Fig.3 Membership function of the input variable of the fuzzy controller
模糊規(guī)則表詳見文獻(xiàn)[9]中表5-1。模糊推理采用Mamdani準(zhǔn)則,輸出模糊量逆模糊化采用加權(quán)平均法,模糊控制器輸出u=kuU。
2.2 遺傳算法優(yōu)化位置模糊控制器參數(shù)
遺傳算法是一種模仿生物進(jìn)化的智能算法,部分學(xué)者利用遺傳算法解決了模糊控制器設(shè)計(jì)問題[10-11]。本文用遺傳算法來優(yōu)化跟蹤回路模糊控制器ke、kec和ku3個(gè)參數(shù)。對于穩(wěn)定平臺(tái)而言,單位階躍輸入為最苛刻的輸入,因此只對單位階躍輸入時(shí)的系統(tǒng)進(jìn)行優(yōu)化。
種群數(shù)量20,采用實(shí)數(shù)編碼法。選擇策略采用排序選擇法,同時(shí)采用保留最佳個(gè)體的機(jī)制,使適應(yīng)度函數(shù)最小的兩個(gè)個(gè)體保留到下一代。交叉操作采用算術(shù)交叉法,交叉概率為0.8。交叉操作采用非均勻變異法,變異概率為0.01。適應(yīng)度函數(shù):

式中:e(t)為t時(shí)刻的誤差值;σ為系統(tǒng)階躍響應(yīng)的超調(diào)量;e(∞)為系統(tǒng)響應(yīng)的靜態(tài)誤差;w1、w2、w3為大于零的權(quán)重值,取 w1=10、w2=200、w3=5000。
進(jìn)行50代的迭代后,得到ke=17.918、kec=0.138和ku=111.771。每一代中最優(yōu)的適應(yīng)度函數(shù)變化曲線如圖4所示。
系統(tǒng)單位階躍響應(yīng)如圖2中模糊控制響應(yīng)曲線所示。模糊控制器可以很好地改善系統(tǒng)的響應(yīng)特性,不僅使系統(tǒng)的超調(diào)量為零,而且可以將系統(tǒng)的過渡過程時(shí)間控制在0.15 s以內(nèi)。然而,模糊控制的階躍響應(yīng)存在0.2%的靜態(tài)誤差,而且無法直觀地得到跟蹤回路的開環(huán)截止頻率,難以保證其在50 rad/s左右。

圖4 遺傳算法優(yōu)化最優(yōu)適應(yīng)度變化圖Fig.4 Best fitness values of the GA
3 模糊調(diào)整加權(quán)的模糊-PID復(fù)合控制器設(shè)計(jì)與仿真
由第1節(jié)和第2節(jié)可知,單純的PID控制和遺傳算法優(yōu)化的模糊控制都不能完全滿足系統(tǒng)的要求,因此必須把兩者結(jié)合起來形成復(fù)合控制器。常用的結(jié)合方法是閾值切換法,其基本思想是:當(dāng)誤差絕對值大于設(shè)定閾值時(shí),采用模糊控制策略,當(dāng)誤差絕對值小于設(shè)定閾值時(shí)采用PID控制策略[12]。但是在切換時(shí)刻兩種控制器輸出一般不相等,這容易造成施加給被控對象的控制量發(fā)生跳變,造成系統(tǒng)震蕩[13]。本文采用模糊控制調(diào)整加權(quán)因子的PID-模糊復(fù)合控制策略來解決這個(gè)問題。
3.1 復(fù)合控制器的設(shè)計(jì)
設(shè)計(jì)復(fù)合控制器輸出為

式中:UFUZZY為模糊控制器輸出;UPID為經(jīng)典控制器輸出;α為模糊控制器和經(jīng)典控制器輸出的加權(quán)因子,并且0≤α≤1。
本文采用一維模糊控制器來計(jì)算α,其輸入為系統(tǒng)誤差,其變化范圍為[-1,1],輸入變量量化因子為ke′=6,則誤差的量化論域?yàn)椋郏?,6]。定義在誤差量化論域上的模糊子集為{NB,NM,O,PM,PB},相應(yīng)的隸屬度函數(shù)如圖5所示。

圖5 加權(quán)因子模糊控制輸入變量的隸屬度函數(shù)Fig.5 Membership function of the input variable of the weighted factor fuzzy controller
模糊控制規(guī)則如下:

輸出變量W的模糊子集為{PID,MIX,F(xiàn)UZZY},其隸屬度函數(shù)如圖6。
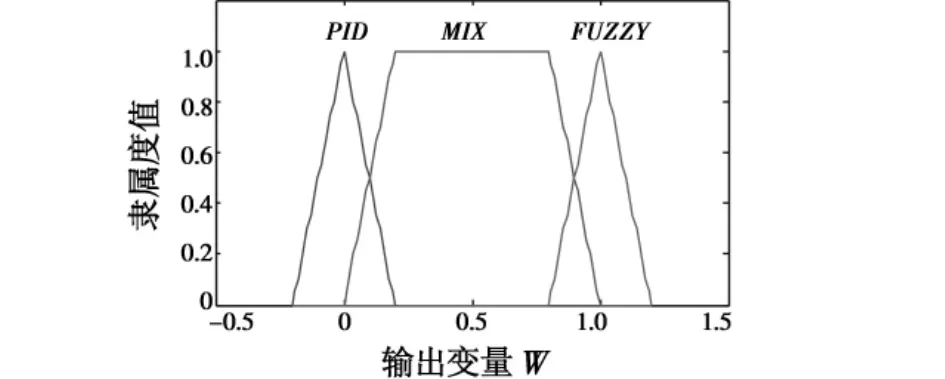
圖6 加權(quán)因子控制器輸出變量的隸屬度函數(shù)Fig.6 Membership function of the output variable of the weighted factor fuzzy controller
模糊推理采用了Mamdani準(zhǔn)則,逆模糊化采用加權(quán)平均法。輸出變量的比例因子為1,即α=W。加權(quán)因子模糊控制器的輸入和輸出關(guān)系如圖7所示。當(dāng)誤差絕對值|e|<0.167時(shí)α=0,復(fù)合控制器就是經(jīng)典PID控制器Cp(s);α隨著誤差絕對值增大而增大,復(fù)合控制器輸出越來越多地依賴于模糊控制器輸出;α隨著量化誤差變化連續(xù)變化,復(fù)合控制器輸出不會(huì)產(chǎn)生較大突變,避免了由閾值切換法引起的輸出震蕩。
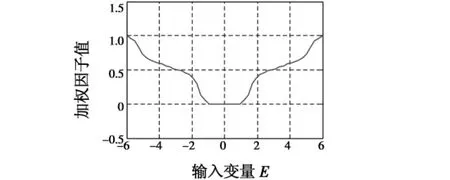
圖7 加權(quán)因子模糊控制器輸入輸出關(guān)系Fig.7 The input-output relationship of the weighted factor fuzzy contoller
3.2 仿真結(jié)果
圖8所示為系統(tǒng)跟蹤幅值為1,周期為0.5 s,脈寬為0.25 s的方波信號(hào)的響應(yīng)曲線。可見,復(fù)合控制器具有比單純PID控制器更好的跟蹤性能。0 s至0.25 s的復(fù)合控制響應(yīng)曲線可以看作系統(tǒng)的單位階躍響應(yīng)曲線。復(fù)合控制的單位階躍響應(yīng)的超調(diào)量為16%,過渡過程時(shí)間為0.145 s,靜態(tài)誤差為零。
如果在輸入端輸入斜率為1的斜坡信號(hào),則系統(tǒng)跟蹤的誤差曲線如圖9所示。單純的PID控制和復(fù)合控制的跟蹤誤差曲線重合,即兩者具有相同的跟蹤精度。誤差絕對值|e|<0.167,如3.1節(jié)所述,復(fù)合控制器就是經(jīng)典PID控制器Cp(s),所以復(fù)合控制器和經(jīng)典PID控制器有相同的靜態(tài)誤差,跟蹤回路開環(huán)截止頻率約為50 Hz。
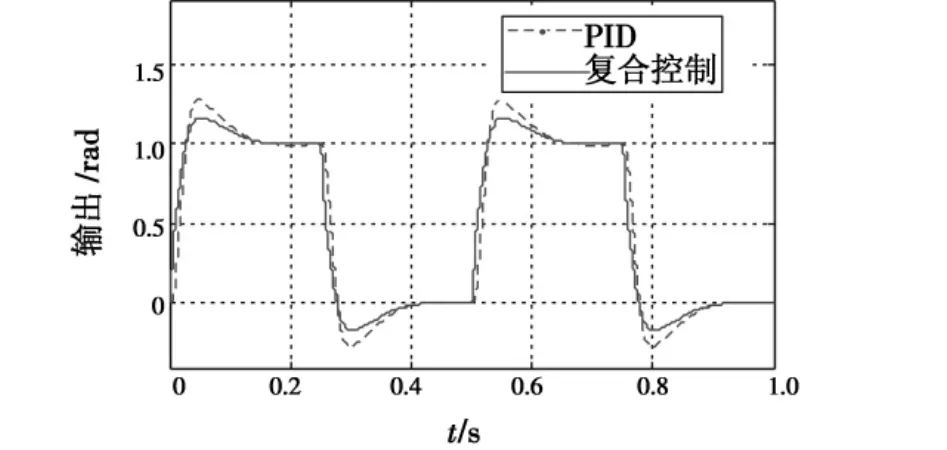
圖8 PID控制和復(fù)合控制單位方波跟蹤響應(yīng)Fig.8 The square wave responses of the PID controller and the composite controller

圖9 PID控制和復(fù)合控制單位斜坡信號(hào)跟蹤誤差曲線Fig.9 Ramp signal tracking error curves of the PID controller and composite controller
如果在系統(tǒng)輸出端加上寬度為0.1 s,周期為0.2 s,幅值為0.3 rad的正負(fù)交替的干擾脈沖。PID控制器和復(fù)合控制器響應(yīng)曲線如圖10所示。可見,與單純的PID控制相比,復(fù)合控制具有更強(qiáng)的抗干擾能力。

圖10 PID控制和復(fù)合控制方波干擾響應(yīng)Fig.10 Square wave disturb responses of the PID controller and the composite controller
4 結(jié)論
仿真性能表明,文中設(shè)計(jì)的模糊控制調(diào)整加權(quán)因子的模糊-PID復(fù)合控制器可以滿足系統(tǒng)的要求。從設(shè)計(jì)過程而言,PID控制器和模糊控制器可以根據(jù)系統(tǒng)要求獨(dú)立設(shè)計(jì),簡化了設(shè)計(jì)工作。與模糊PID算法相比,這種方法比較簡單,需要的計(jì)算量較小。
模糊-PID復(fù)合控制器設(shè)計(jì)的核心是尋找最優(yōu)的系統(tǒng)誤差和加權(quán)因子之間的對應(yīng)關(guān)系,而加權(quán)因子模糊控制器的輸入輸出模糊變量的隸屬度函數(shù)和量化因子決定了這種對應(yīng)關(guān)系。在進(jìn)一步研究中可以采用模糊神經(jīng)網(wǎng)絡(luò)在在線運(yùn)行中調(diào)整有關(guān)參數(shù)來優(yōu)化系統(tǒng)性能。
[1]RUE A K.Stabilization of precision electro-optical pointing and tracking systems[J].IEEE Trans Aerospace and Electronic Systems,1969,AES-5:805-819.
[2]唐小軍,趙曉蓓,毛武軍.基于DSPs的空空導(dǎo)彈位標(biāo)器控制系統(tǒng)的設(shè)計(jì)[J].彈箭與制導(dǎo)學(xué)報(bào),2005,25(2):327-332.
[3]陸岷,張平.基于DSP的天線穩(wěn)定平臺(tái)控制器[J].計(jì)算機(jī)測量與控制,2006,14(8):1052-1071.
[4]MCKERLEY C W.A model for a two degree of freedom coupled seeker with mass imbalance[C]//Southeastcon’96,‘Bring Together Education,Science and Technology’,Proceedings of the IEEE,11-14 April,1996:84-87.
[5]趙超.導(dǎo)引頭穩(wěn)定系統(tǒng)隔離度研究[J].電光與控制,2008,15(7):78-82.
[6]孫寧,劉潔瑜,周小剛,等.光纖陀螺慣性數(shù)字穩(wěn)定回路設(shè)計(jì)[J].電光與控制,2007,14(3):131-135.
[7]車宏,盧廣山.模糊控制在機(jī)載光電跟蹤系統(tǒng)中的應(yīng)用[J].電光與控制,2001,8(4):15-20.
[8]何華鋒,胡昌華,代延民.一種自適應(yīng)模糊PID控制器應(yīng)用仿真[J].電光與控制,2006,13(1):41-44.
[9]李士勇.模糊控制和智能控制理論與應(yīng)用[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1990.
[10]歐陽晉,屈衛(wèi)東.基于遺傳算法的模糊控制器優(yōu)化設(shè)計(jì)及應(yīng)用[J].控制與決策,2003,18(2):386-388.
[11]FANG Laihua,WU Aiguo,ZHENG Aihong.GA&LS-based fuzzy neural network control[C]//Proceedings of the 5th World Congress on Intelligent Control and Automation,2004:2467-2650.
[12]薛福珍,劉忍權(quán).基于GA的模糊-PID控制器設(shè)計(jì)[J].自動(dòng)化與儀表,2006(3):45-49.
[13]姬偉.陀螺穩(wěn)定光電跟蹤平臺(tái)伺服控制系統(tǒng)研究[D].南京:東南大學(xué),2006.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17